TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025178988
公報種別
公開特許公報(A)
公開日
2025-12-09
出願番号
2024085917
出願日
2024-05-27
発明の名称
作業用ロボット
出願人
新電元工業株式会社
代理人
個人
主分類
G05D
1/243 20240101AFI20251202BHJP(制御;調整)
要約
【課題】走行の安定性と作業効率の向上を図る。
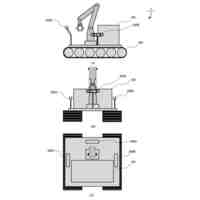
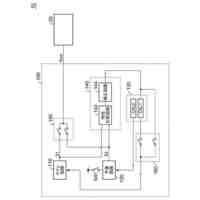
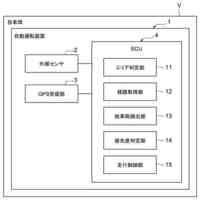
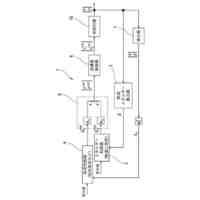
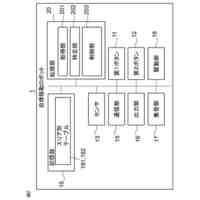
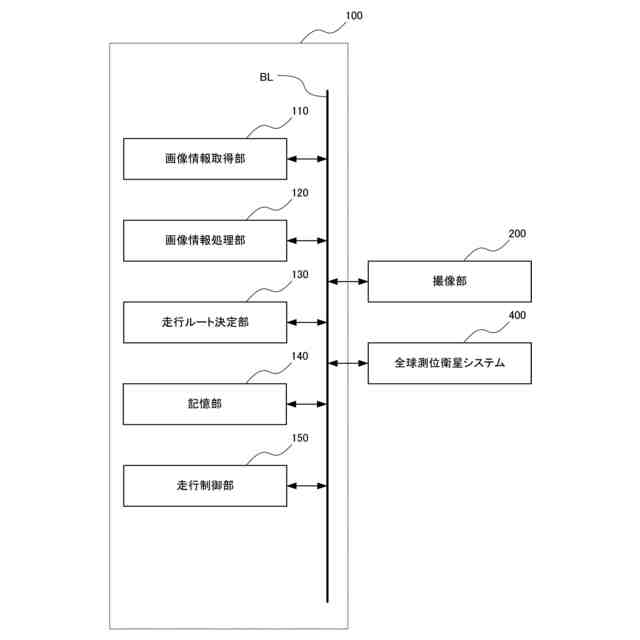
【解決手段】少なくとも進行方向の前方に設けられ、各方向の画像データを撮像する撮像部200と、撮像された画像データから各種情報を取得する画像情報取得部110と、取得された画像データを画像処理解析して、畝の画像の有無および進行方向の障害物の有無を判定する画像情報処理部120と、特定箇所の位置情報を記憶する記憶部140と、画像情報処理部による処理結果および特定箇所の位置情報に基づいて、進行方向を決定する走行ルート決定部130と、決定された走行ルートを走行するように制御を実行する走行制御部150と、を備え、走行ルート決定部130は、特定箇所に対して所定の範囲内に至るまでは、画像情報処理部120による処理結果に基づいて進行方向を決定し、所定の範囲内から特定箇所に至るまでは、全球測位衛星システムから得られる情報に基づいて、進行方向を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
進行方向に配列されている走行補助対象物に対して所定の作業を実行する作業用ロボットであって、
少なくとも前記進行方向の前方に設けられ、各方向の画像データを撮像する撮像部と、
該撮像された画像データから各種情報を取得する画像情報取得部と、
該取得された前記画像データを画像処理解析して、畝の画像の有無および進行方向の障害物の有無を判定する画像情報処理部と、
特定箇所の位置情報を記憶する記憶部と、
前記画像情報処理部による処理結果および前記特定箇所の位置情報に基づいて、前記進行方向を決定する走行ルート決定部と、
前記走行ルート決定部により決定された走行ルートを走行するように制御を実行する走行制御部と、
を備え、
前記走行ルート決定部は、前記特定箇所に対して所定の範囲内に至るまでは、前記画像情報処理部による前記処理結果に基づいて前記進行方向を決定し、少なくとも前記所定の範囲内から前記特定箇所に至るまでは、全球測位衛星システムから得られる情報に基づいて、前記進行方向を決定する作業用ロボット。
続きを表示(約 1,400 文字)
【請求項2】
前記走行補助対象物の配列に欠落領域がある場合には、前記欠落領域の始点に第1の特定箇所が設定され、前記欠落領域の終点に第2の特定箇所が設定され、
前記走行ルート決定部は、前記欠落領域を進行する場合には、全球測位衛星システムから得られる情報に基づいて、前記進行方向を決定する請求項1に記載の作業用ロボット。
【請求項3】
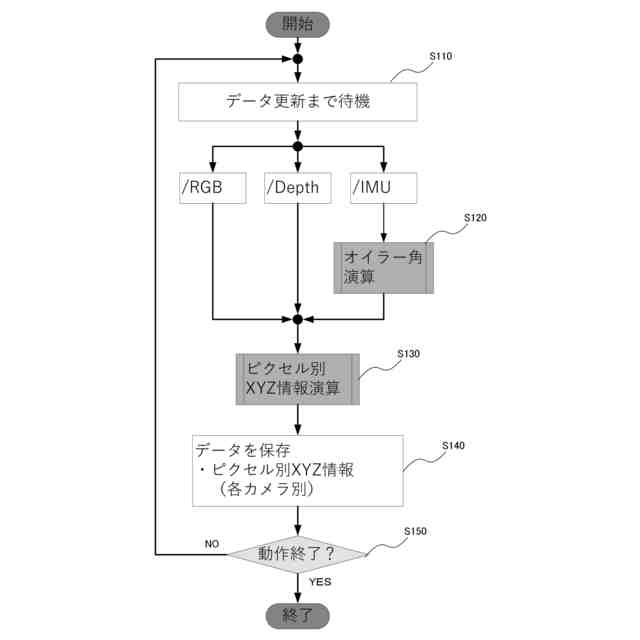
前記画像情報取得部は、前記画像データから深度情報、オイラー角情報を含む前記各種情報を取得する請求項2に記載の作業用ロボット。
【請求項4】
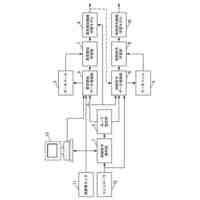
前記画像情報取得部は、
慣性データから前記オイラー角情報を演算するとともに、前記深度情報、オイラー角情報を含む情報からピクセル毎の3次元情報を演算する演算部を備え、
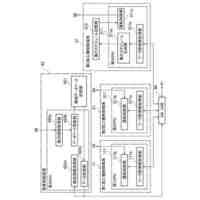
前記進行方向の前方の前記撮像部に対応する第1の画像情報処理部は、
前記ピクセル毎の3次元情報に基づいて、走行ルート周辺の段差あるいは障害物の有無を判定する第1の判定処理部を備える請求項3に記載の作業用ロボット。
【請求項5】
前記画像情報取得部は、
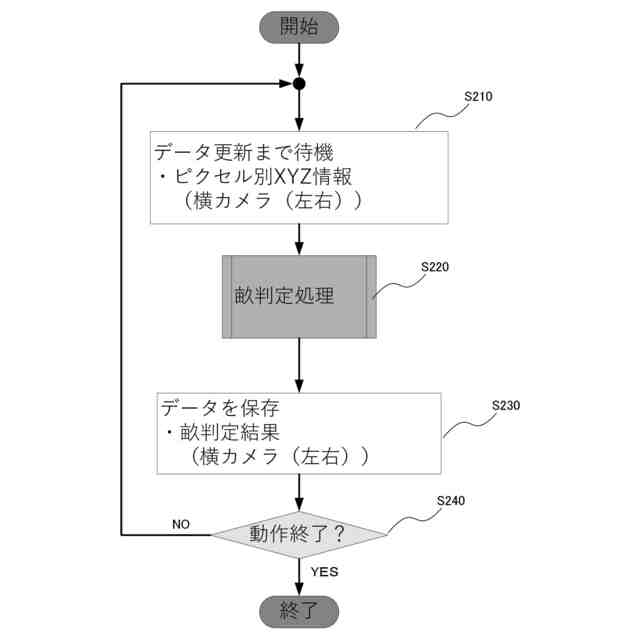
前記深度情報、オイラー角情報を含む情報からピクセル毎の3次元情報を演算する演算部を備え、
前記進行方向の右方向あるいは左方向の前記撮像部に対応する第2の画像情報処理部は、
前記ピクセル毎の3次元情報に基づいて、前記走行補助対象物の判定を行う第2の判定処理部を備える請求項3に記載の作業用ロボット。
【請求項6】
前記第1の判定処理部は、
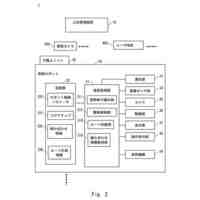
前記ピクセル毎の3次元情報を平均化する平均化処理および平均化された前記ピクセル毎の3次元情報を圧縮処理する3次元情報処理部と、
判定領域内の該処理された前記3次元情報に含まれる高さ情報に基づいて、所定の閾値を超える前記3次元情報を抽出する情報抽出部と、
を含み、
前記判定領域内の該処理された前記3次元情報に含まれる高さ情報に基づいて、前記走行ルート周辺の段差あるいは障害物の有無を判定する請求項4に記載の作業用ロボット。
【請求項7】
前記第2の判定処理部は、
前記ピクセル毎の3次元情報を平均化する平均化処理および平均化された前記ピクセル毎の3次元情報を圧縮処理する3次元情報処理部と、
判定領域内の該処理された前記3次元情報に含まれる高さ情報に基づいて、所定の閾値を超える前記3次元情報を抽出する情報抽出部と、
を含み、
該抽出された前記3次元情報に対応する奥行き情報及び幅情報に基づいて、前記走行補助対象物を判定する請求項5に記載の作業用ロボット。
【請求項8】
前記走行ルートは、前記走行補助対象物としての農地の畝に沿う経路あるいは前記畝と前記畝とが隣り合う前記畝の間の経路である請求項7に記載の作業用ロボット。
【請求項9】
前記第1の判定処理部が、走行ルート周辺に有った段差がなくなったと判定した場合に、前記走行ルート決定部は、前記段差があった方向に向きを変えるような前記走行ルートを決定する請求項4に記載の作業用ロボット。
【請求項10】
前記第2の判定処理部が、左右いずれの方向にも前記畝があると判定した場合には、さらに、向きを前記走行補助対象物が延在する方向に走行ルートを決定する請求項5に記載の作業用ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業用ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、建物内部や屋外の限定された領域内を、周囲の環境に基づいて自律的に移動可能な自律移動ロボット(移動体)が開発されつつある。
このような自律移動ロボットは、労務又は労働の代替となり、労働者不足を補うものとして、例えば、農業や林業、運送業をはじめとする様々な業態において、活用させることが期待されている。
【0003】
この種の自律移動ロボットとして、例えば、位置測位を行うことなく、所望の経路を自動的に走行させることを目的として、進行方向に配列されている検出対象物である作物に対して所定の作業を施す装置であって、進行方向に向けて作物を撮影して、画像データを取得するカメラと、画像データに対して予め定めた位置に、複数の判定窓を配置し、当該複数の判定窓等の作物を認識する認識部と、認識部による認識結果に基づいて、進行方向を調整する調整部と、を備えた自動走行装置が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
国際公開2022/215416号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の技術は、作業車両の向きを検知し、その方向検知部材が検知する車体の向きと設定された走行経路が所定値以上異なると、作業車両を設定された走行経路に向かう方向に操舵部材を操舵させるものである。
【0006】
しかしながら、上記の技術では、全球測位衛星システムから得られる情報のみにより走行車両の走行経路のずれを判断しているため、その構成が複雑になり且つ精度が要求される領域において十分な精度が担保できないという課題があった。
【0007】
そこで、本発明は上述の課題に鑑みてなされたものであり、位置測位を特定の箇所のみで活用することにより、所望の経路を自動的に走行することができるため、走行の安定性と作業効率の向上を図る作業用ロボットを提供することを目的とする。
【課題を解決するための手段】
【0008】
形態1;本発明の1またはそれ以上の実施形態は、進行方向に配列されている走行補助対象物に対して所定の作業を実行する作業用ロボットであって、少なくとも前記進行方向の前方に設けられ、各方向の画像データを撮像する撮像部と、該撮像された画像データから各種情報を取得する画像情報取得部と、該取得された前記画像データを画像処理解析して、畝の画像の有無および進行方向の障害物の有無を判定する画像情報処理部と、特定箇所の位置情報を記憶する記憶部と、前記画像情報処理部による処理結果および前記特定箇所の位置情報に基づいて、前記進行方向を決定する走行ルート決定部と、前記走行ルート決定部により決定された走行ルートを走行するように制御を実行する走行制御部と、を備え、前記走行ルート決定部は、前記特定箇所に対して所定の範囲内に至るまでは、前記画像情報処理部による前記処理結果に基づいて前記進行方向を決定し、少なくとも前記所定の範囲内から前記特定箇所に至るまでは、全球測位衛星システムから得られる情報に基づいて、前記進行方向を決定する作業用ロボットを提案している。
【0009】
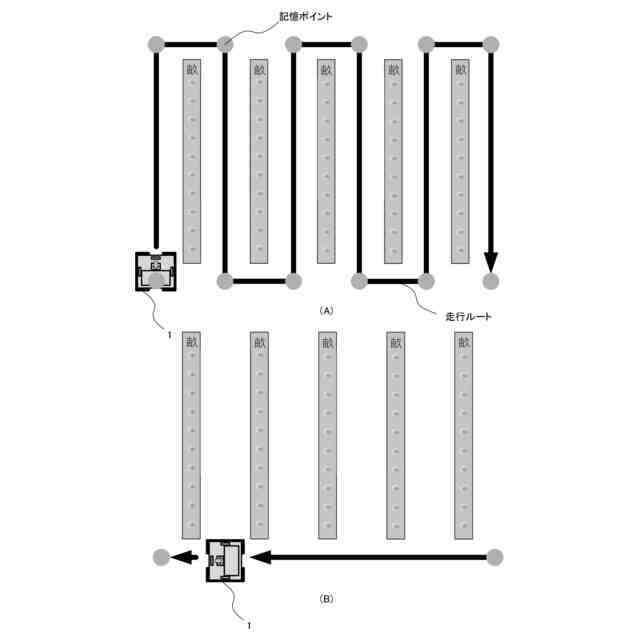
形態2;本発明の1またはそれ以上の実施形態は、前記走行補助対象物の配列に欠落領域がある場合には、前記欠落領域の始点に第1の特定箇所が設定され、前記欠落領域の終点に第2の特定箇所が設定され、前記走行ルート決定部は、前記欠落領域を進行する場合には、全球測位衛星システムから得られる情報に基づいて、前記進行方向を決定する作業用ロボットを提案している。
【0010】
形態3;本発明の1またはそれ以上の実施形態は、前記画像情報取得部は、前記画像データから深度情報、オイラー角情報を含む前記各種情報を取得する作業用ロボットを提案している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社熊谷組
障害物の検出方法
2か月前
株式会社クボタ
作業車
1か月前
新電元工業株式会社
作業用ロボット
今日
株式会社クボタ
作業車
11日前
新電元工業株式会社
作業用ロボット
2か月前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
12日前
株式会社アサヒエンタープライズ
調整弁
27日前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイフク
物品搬送設備
1か月前
RFルーカス株式会社
自動棚卸ロボット
6日前
株式会社アマダ
工作機械制御装置
2か月前
日野自動車株式会社
自動運転装置
2か月前
村田機械株式会社
搬送車システム
2か月前
株式会社カーメイト
アクセルペダルカバー
2か月前
株式会社明電舎
負荷制御装置
1か月前
浦登有限公司
電源回路
4日前
オムロン株式会社
システム及び方法
1か月前
オムロン株式会社
システム及び方法
1か月前
株式会社明電舎
負荷制御装置
1か月前
株式会社計数技研
移動体、及びプログラム
19日前
株式会社明電舎
負荷制御装置
1か月前
多摩川精機株式会社
レバー装置
1か月前
トヨタ自動車株式会社
管理システム、及び管理方法
1か月前
日清紡マイクロデバイス株式会社
定電圧回路
1か月前
アズビル株式会社
情報処理装置および情報処理方法
11日前
ローム株式会社
半導体装置
1か月前
トヨタ自動車株式会社
管理システム、及び管理方法
11日前
ローム株式会社
半導体装置
27日前
ローム株式会社
電源装置
2か月前
富士電機株式会社
集積回路
11日前
セコム株式会社
自律移動ロボット
2か月前
IDEC株式会社
教示装置
2か月前
株式会社TMEIC
通信伝文データ照合装置
2か月前
ローム株式会社
定電圧生成回路
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ