TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025176306
公報種別
公開特許公報(A)
公開日
2025-12-04
出願番号
2024082335
出願日
2024-05-21
発明の名称
踏板交換用泥除去工具
出願人
高速道路トールテクノロジー株式会社
,
株式会社裕進
代理人
個人
,
個人
主分類
B25D
3/00 20060101AFI20251127BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】地面と踏板との間に固着した泥や錆を効率的に除去する踏板交換用泥除去工具を提供する。
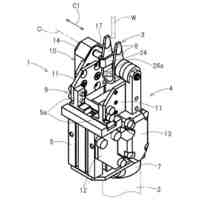
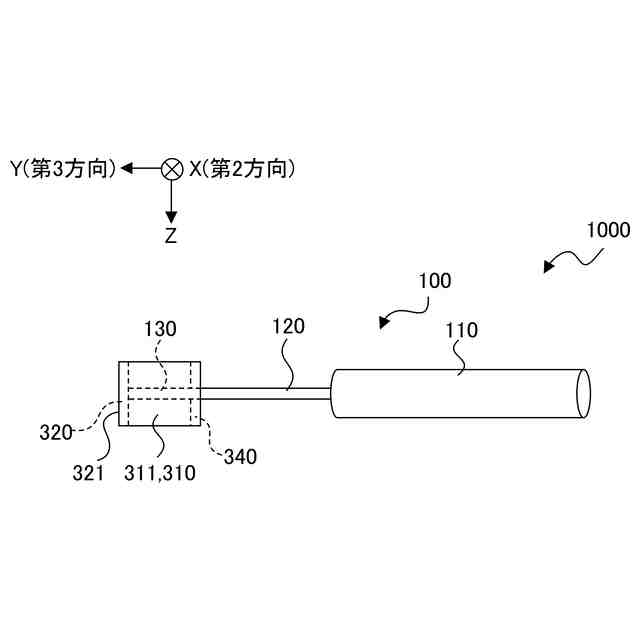
【解決手段】踏板交換用泥除去工具1000は、第1方向に延びる柄100と、刃200と、第1被打撃面311と、第2被打撃面321とを備える。刃200は、柄100の第1方向の端部130に接続され、端部130から第1方向と異なる第2方向に延びるように構成されている。第1被打撃面311は、柄100の第1方向の端部130の、第2方向の反対方向に設けられ、第2方向の反対方向から打撃されるように構成されている。第2被打撃面321は、柄100の第1方向の端に設けられ、第2方向と直交する第3方向に設けられ、第3方向から打撃されるように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
第1方向に延びる柄と、
前記柄の前記第1方向の端部に接続され、前記端部から前記第1方向と異なる第2方向に延びる刃と、
前記柄の前記第1方向の前記端部の、前記第2方向の反対方向に設けられ、前記第2方向の反対方向から打撃される第1被打撃面と、
前記柄の前記第1方向の端に設けられ、前記第2方向と直交する第3方向に設けられ、前記第3方向から打撃される第2被打撃面と、
を備える踏板交換用泥除去工具。
続きを表示(約 530 文字)
【請求項2】
前記第2被打撃面は、前記第1被打撃面に直交する
請求項1に記載の踏板交換用泥除去工具。
【請求項3】
前記刃は、前記第3方向の反対方向の端を形成する刃輪郭線を有し、
前記刃輪郭線が延びる方向は、前記第2方向より前記第3方向の反対方向に傾いている
請求項1または2に記載の踏板交換用泥除去工具。
【請求項4】
前記柄の前記第1方向の前記端部に設けられ、前記刃より前記第2方向と前記第3方向とに直交する方向に突出するストッパー部を
さらに備える請求項1または2に記載の踏板交換用泥除去工具。
【請求項5】
前記第1方向は、
前記第2方向と前記第3方向とを含む平面の面内方向を表し、
前記第3方向より前記第2方向に傾いている
請求項1または2に記載の踏板交換用泥除去工具。
【請求項6】
前記柄の前記第1方向の前記端部は、前記第2方向と前記第3方向とに延びる板状に形成され、
前記端部から前記第2方向と前記第3方向とに直交する方向に延びる補強部を
さらに備える請求項5に記載の踏板交換用泥除去工具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、踏板交換用泥除去工具に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
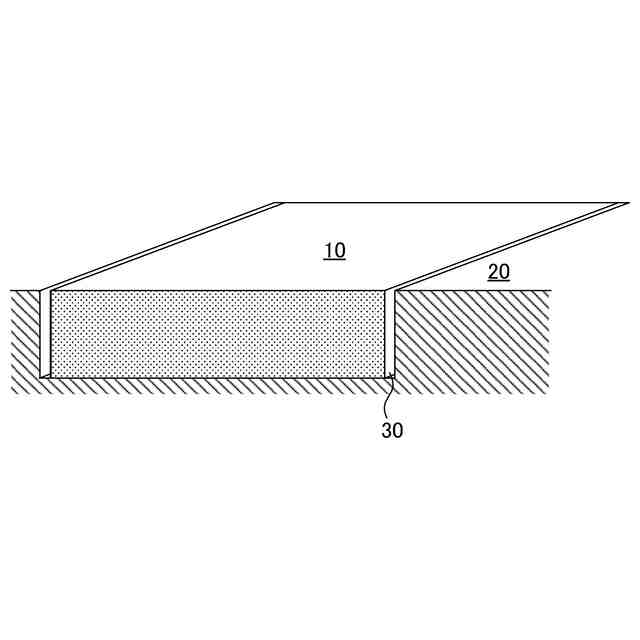
上方からの圧力を感知する踏板を地面、例えば車道に埋め込み、踏板の上方を通過する車両を検知する装置がある。この踏板を交換するために取り外すとき、踏板と地面との間に固着した泥や錆を除去する必要がある。従来の工具では、この泥を効率的に除去することが困難であった。
【0003】
特許文献1には、空気圧によりシリンダ内のピストンを往復運動させ刃物を打撃する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平9-76173号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の技術では、刃物の延びる方向に打撃を加えることで、刃物の切断方向に大きな力を加えることができるが、踏板と地面との間に固着した泥や錆を効率的に除去することはできない。
【0006】
上記の状況に鑑み、踏板と地面との間に固着した泥や錆を効率的に除去できる踏板交換用除去工具を提供することを目的の1つとする。他の目的については、以下の記載及び実施の形態の説明から理解することができる。
【課題を解決するための手段】
【0007】
以下に、発明を実施するための形態で使用される番号・符号を用いて、課題を解決するための手段を説明する。これらの番号・符号は、特許請求の範囲の記載と発明を実施するための形態との対応関係の一例を示すために、参考として、括弧付きで付加されたものである。よって、括弧付きの記載により、特許請求の範囲は、限定的に解釈されるべきではない。
【0008】
上記目的を達成するための一実施の形態による踏板交換用泥除去工具(1000)は、第1方向に延びる柄(100)と、刃(200)と、第1被打撃面(311)と、第2被打撃面(321)とを備える。刃(200)は、柄(100)の第1方向の端部(130)に接続され、端部(130)から第1方向と異なる第2方向に延びるように構成されている。第1被打撃面(311)は、柄の第1方向の端部(130)の、第2方向の反対方向に設けられ、第2方向の反対方向から打撃されるように構成されている。第2被打撃面(321)は、柄(100)の第1方向の端に設けられ、第2方向と直交する第3方向に設けられ、第3方向から打撃されるように構成されている。
【発明の効果】
【0009】
上記の形態によれば、踏板交換用泥除去工具は地面と踏板との間に固着した泥や錆を効率的に除去することができる。
【図面の簡単な説明】
【0010】
一実施の形態における踏板交換用泥除去工具の正面図である。
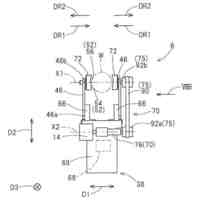
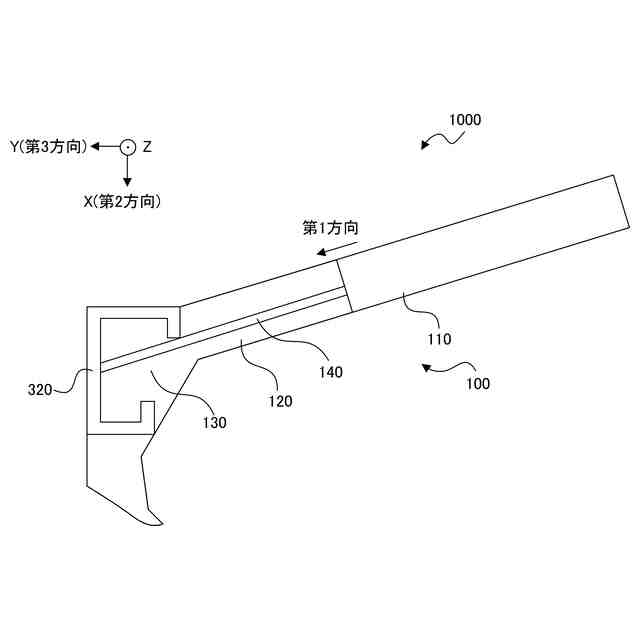
一実施の形態における踏板が設置された状態における斜視断面図である。
一実施の形態における踏板交換用泥除去工具の左側面図である。
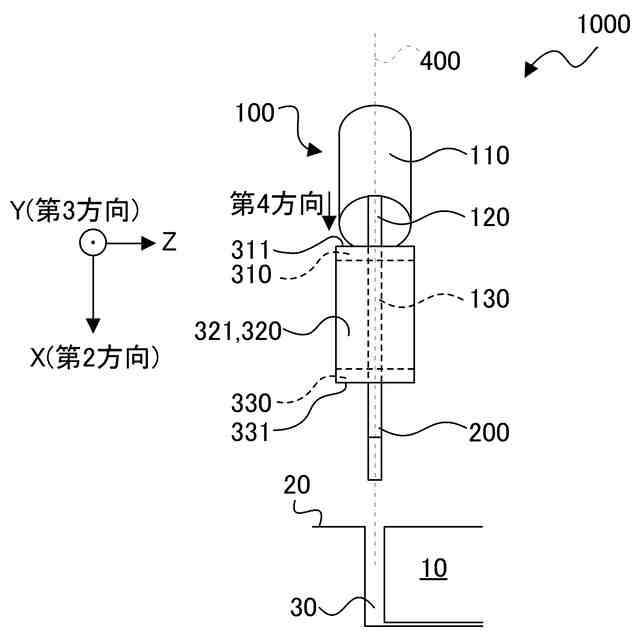
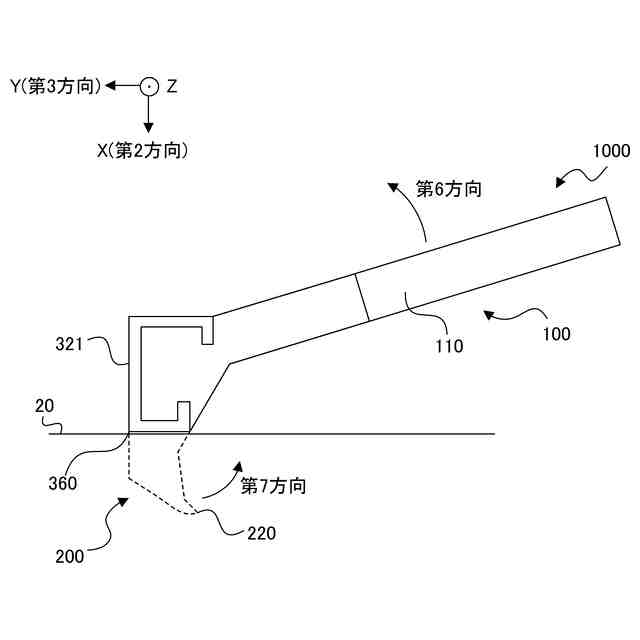
一実施の形態における踏板交換用泥除去工具の使用方法を説明するための図である。
一実施の形態における踏板交換用泥除去工具の使用方法を説明するための図である。
一実施の形態における踏板交換用泥除去工具の平面図である。
一実施の形態における踏板交換用泥除去工具の底面図である。
一実施の形態における踏板交換用泥除去工具の正面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
川崎重工業株式会社
ロボット
2か月前
トヨタ自動車株式会社
学習装置
18日前
CKD株式会社
把持装置
3日前
株式会社不二越
ロボット
2か月前
株式会社竹中工務店
補助セット
2か月前
ダイセイ株式会社
ロボット自動刻印装置
3日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
2か月前
瓜生製作株式会社
電動締付工具
11日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社マキタ
集塵アタッチメント
10日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社不二越
垂直多関節ロボット
18日前
トヨタ自動車株式会社
軌道生成装置
2か月前
アネックスツール株式会社
ドライバービット
2か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社マキタ
回転打撃工具
2か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
ワールド技研株式会社
ロボットセル装置
2か月前
トヨタ自動車株式会社
ロボットの制御装置
2か月前
NTN株式会社
ハンド
2か月前
山九株式会社
レンチ保持治具
2か月前
セイコーエプソン株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
学校法人立命館
ロボットハンド制御システム
1か月前
NTN株式会社
作業装置
2か月前
NTN株式会社
把持装置
3日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ