TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025174553
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024080995
出願日
2024-05-17
発明の名称
ロボットの教示装置及びロボットの教示方法並びにプログラム
出願人
株式会社ジャノメ
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20251120BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】操作が簡易であり、且つ直感的にティーチング作業を行うこと。
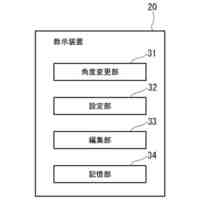
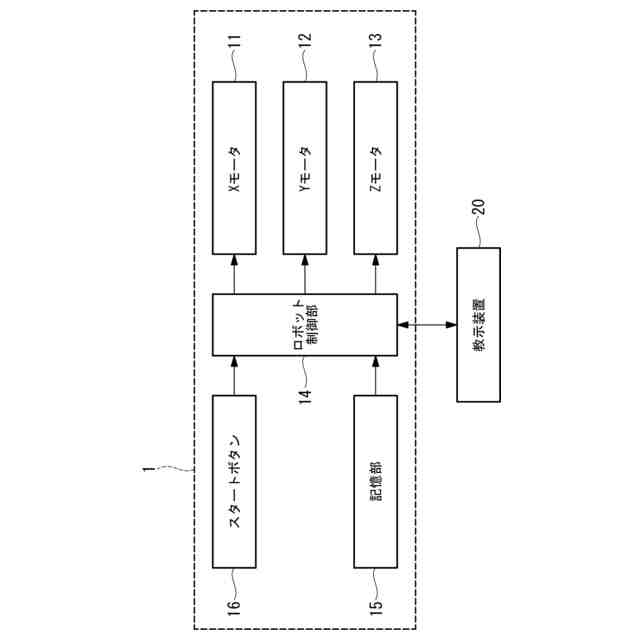
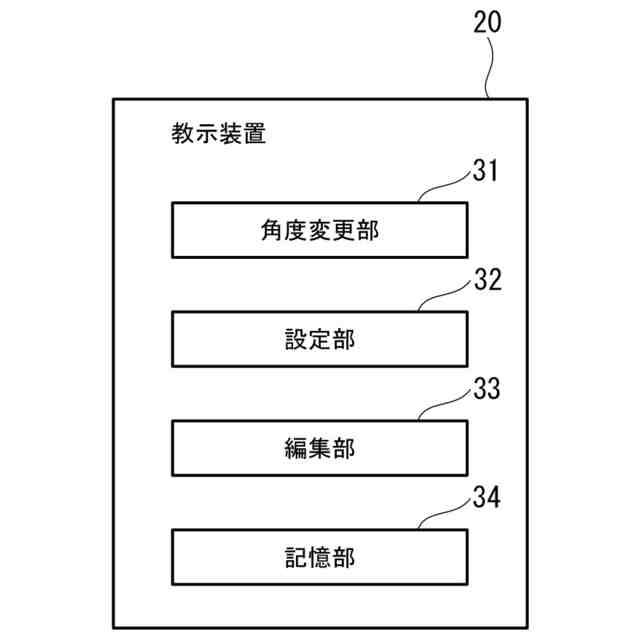
【解決手段】ロボットの作業空間と相関する3次元空間を表示部に表示し、3次元空間にロボットの動作座標を入力可能なロボットの教示装置20である。教示装置20は、入力デバイスからの指示に基づいて、3次元空間の表示角度を変更する角度変更部31と、3次元空間の表示角度に応じて、3次元空間におけるいずれか一つの2次元平面を動作座標の編集が可能な編集平面として設定する設定部32とを備える。
【選択図】図4
特許請求の範囲
【請求項1】
ロボットの作業空間と相関する3次元空間を表示部に表示し、前記3次元空間に前記ロボットの動作座標を入力可能なロボットの教示装置であって、
入力手段からの指示に基づいて、前記3次元空間の表示角度を変更する角度変更手段と、
前記3次元空間の表示角度に応じて、前記3次元空間におけるいずれか一つの2次元平面を前記動作座標の編集が可能な編集平面として設定する設定手段と、
を備えるロボットの教示装置。
続きを表示(約 1,100 文字)
【請求項2】
前記3次元空間において、前記ロボットの動作座標の入力を受け付ける編集手段を備え、
前記編集手段は、前記編集平面が設定されている場合、前記編集平面上の座標値のみを編集可能とする請求項1に記載のロボットの教示装置。
【請求項3】
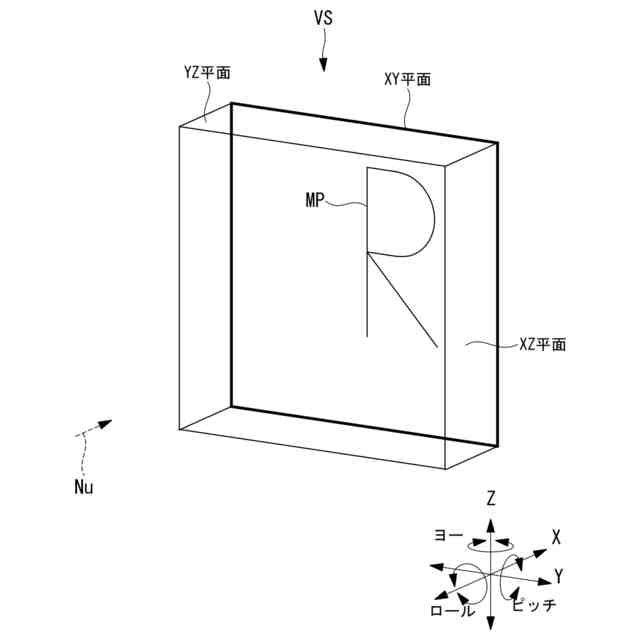
前記設定手段は、前記表示部の表示画面の法線と、前記3次元空間を規定する各2次元平面の法線とのなす角度を用いて、前記編集平面を設定する請求項1に記載のロボットの教示装置。
【請求項4】
前記設定手段は、前記表示部の表示画面の法線と、前記3次元空間を規定する各2次元平面のそれぞれの法線とのなす角度から余弦の絶対値をそれぞれ算出し、前記余弦の絶対値を用いて前記編集平面を設定する請求項1に記載のロボットの教示装置。
【請求項5】
複数の前記2次元平面には、優先的に編集平面とする優先編集平面が含まれ、
前記設定手段は、前記優先編集平面の前記余弦の絶対値が予め設定されている閾値以上である場合に、前記優先編集平面を編集平面に設定する請求項4に記載のロボットの教示装置。
【請求項6】
前記設定手段は、前記余弦の絶対値が最も大きい前記2次元平面を前記編集平面に設定する請求項4に記載のロボットの教示装置。
【請求項7】
前記設定手段は、前記3次元空間の表示角度に応じて、前記編集平面を設定する第1モードと、前記入力手段からの指示に基づいて前記編集平面を設定する第2モードとを有し、前記入力手段からの指示に基づいて前記第1モードと前記第2モードとを切り替えるモード切替手段を備える請求項1に記載のロボットの教示装置。
【請求項8】
前記3次元空間において前記動作座標または複数の前記動作座標を繋げた経路情報が選択された場合に、前記動作座標または前記経路情報を、前記3次元空間を規定する2次元平面の少なくとも一つに投影表示させる請求項1に記載のロボットの教示装置。
【請求項9】
前記編集平面を強調して表示する請求項1に記載のロボットの教示装置。
【請求項10】
ロボットの作業空間と相関する3次元空間を表示部に表示し、前記3次元空間に前記ロボットの動作座標を入力可能なロボットの教示方法であって、
入力手段からの指示に基づいて、前記3次元空間の表示角度を変更する角度変更工程と、
前記3次元空間の表示角度に応じて、前記3次元空間におけるいずれか一つの2次元平面を前記動作座標の編集が可能な編集平面として設定する設定工程と、
をコンピュータが実行するロボットの教示方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの教示装置及びロボットの教示方法並びにプログラムに関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
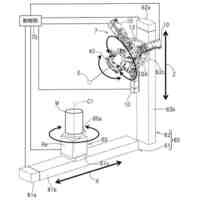
従来、ロボットの作業空間と相関する仮想3次元空間を用いて、ロボットの動作座標(以下「ティーチングデータ」ともいう。)を編集可能なロボットの教示装置が知られている。
【0003】
一般的に、ティーチングデータの作成は、2次元平面上で行われる。従来、3次元空間上の操作を2次元平面上で編集する場合に、マウスなどのボタン操作によって任意の2次元平面を編集平面として選択し、編集平面を切り替えながらティーチングデータを編集する方法が提案されている。(例えば、特許文献1等参照)
【0004】
また、特許文献2には、ポインティングデバイスによるカーソル操作によって、XY平面→YZ平面というように編集平面を所定の順序で切替えることで、ユーザが編集平面を選択する操作を省略する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開平10-333827号公報
特許第5120290号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献2に記載された方法では、編集平面を第1平面(XY平面)、第2平面(YZ平面)というように、所定の順序に従って切り替える必要がある。このため、例えば、YZ平面上においてティーチングデータを編集したい場合であっても、一度XY平面の編集モードを経由しないとYZ平面上の編集モードに移行することができなかった。
【0007】
本発明は、このような事情に鑑みてなされたものであって、操作が簡易であり、且つ直感的にティーチング作業を行うことのできるロボットの教示装置及びロボットの教示方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
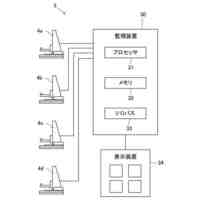
本発明の一態様は、ロボットの作業空間と相関する3次元空間を表示部に表示し、前記3次元空間に前記ロボットの動作座標を入力可能なロボットの教示装置であって、入力手段からの指示に基づいて、前記3次元空間の表示角度を変更する角度変更手段と、前記3次元空間の表示角度に応じて、前記3次元空間におけるいずれか一つの2次元平面を前記動作座標の編集が可能な編集平面として設定する設定手段と、を備えるロボットの教示装置である。
【0009】
本発明の一態様は、ロボットの作業空間と相関する3次元空間を表示部に表示し、前記3次元空間に前記ロボットの動作座標を入力可能なロボットの教示方法であって、入力手段からの指示に基づいて、前記3次元空間の表示角度を変更する角度変更工程と、前記3次元空間の表示角度に応じて、前記3次元空間におけるいずれか一つの2次元平面を前記動作座標の編集が可能な編集平面として設定する設定工程と、をコンピュータが実行するロボットの教示方法である。
【0010】
本発明の一態様は、コンピュータを上記ロボットの教示装置として機能させるためのプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ジャノメ
ロボットの教示装置及びロボットの教示方法並びにプログラム
2日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
25日前
トヨタ自動車株式会社
学習装置
10日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
1か月前
瓜生製作株式会社
電動締付工具
3日前
川崎重工業株式会社
塗装システム
1か月前
株式会社安川電機
ロボット
1か月前
株式会社不二越
垂直多関節ロボット
10日前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社マキタ
集塵アタッチメント
2日前
株式会社三共コーポレーション
工具保持具
25日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
回転打撃工具
1か月前
山九株式会社
レンチ保持治具
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
株式会社マキタ
作業機
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
23日前
NTN株式会社
作業装置
1か月前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
電動工具
10日前
東レエンジニアリング株式会社
ツール動作機構
1か月前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
本田技研工業株式会社
リンク機構
1か月前
国立大学法人東京科学大学
多自由度入力装置用制御装置
2日前
川崎重工業株式会社
監視システム
1か月前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
ファナック株式会社
経路データセット生成
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ