TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025174116
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024080199
出願日
2024-05-16
発明の名称
車両用通信システム
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
G01S
13/87 20060101AFI20251120BHJP(測定;試験)
要約
【課題】車両用通信システムにおいて、携帯機の位置の検出精度を向上する。
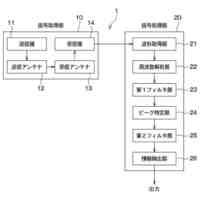
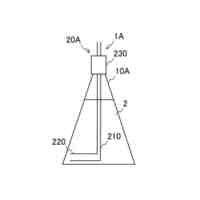
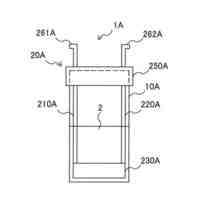
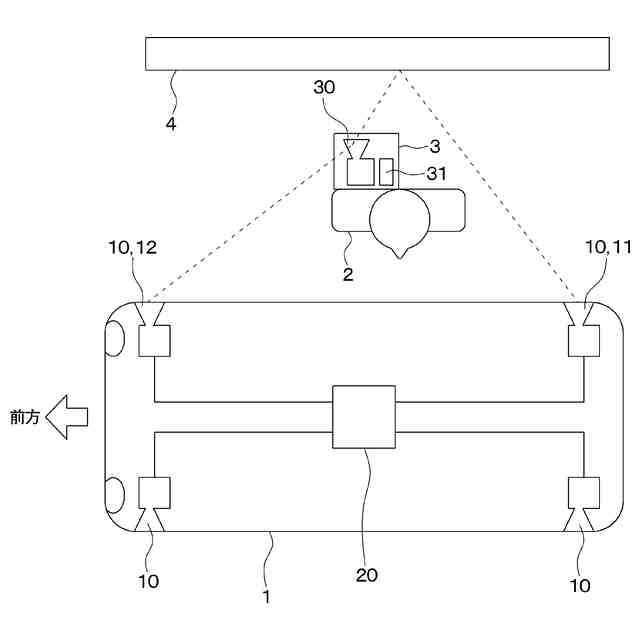
【解決手段】車両用通信システムは、所定の帯域の電波を送受信する複数の車載アンテナ10と、複数の車載アンテナ10による送受信を制御する制御部20を備える。制御部20は、車両1の外部に所定の帯域の電波を反射する反射体4が存在するか否かを判定する。そして、制御部20は、車両1の外部に反射体4が存在しない場合、複数の車載アンテナ10と携帯機3との間の無線通信でそれぞれ測距した複数の測距値を用いて携帯機3の位置を算出する。それに対し、制御部20は、車両1の外部に反射体4が存在する場合、車両と反射体4との距離を算出し、複数の車載アンテナ10と携帯機3との間の無線通信でそれぞれ測距した複数の測距値と、車両1と反射体4との距離Lとを用いて携帯機3の位置を算出する。
【選択図】図2
特許請求の範囲
【請求項1】
車両(1)のユーザー(2)が携帯する携帯機(3)と無線通信を行い、前記携帯機の位置を検出して前記車両の制御を行う車両用通信システムにおいて、
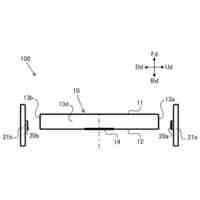
前記車両に搭載され、所定の帯域の電波を送受信する複数の車載アンテナ(10)と、
複数の前記車載アンテナによる送受信を制御する制御部(20)と、を備え、
前記制御部は、
前記車両の外部に前記所定の帯域の電波を反射する反射体(4)が存在するか否かを判定し、
前記車両の外部に前記反射体が存在しない場合、複数の前記車載アンテナと前記携帯機との間の無線通信でそれぞれ測距した複数の測距値を用いて前記携帯機の位置を算出し、
前記車両の外部に前記反射体が存在する場合、前記車両と前記反射体との距離(L)を算出し、複数の前記車載アンテナと前記携帯機との間の無線通信でそれぞれ測距した複数の測距値と、前記車両と前記反射体との距離とを用いて前記携帯機の位置を算出する、車両用通信システム。
続きを表示(約 2,000 文字)
【請求項2】
前記制御部は、
複数の前記車載アンテナがそれぞれ単独の送受信で得られた送受信信号における複数チャネルの複数IQデータから算出した複数の測距値から予め把握しておいた前記車載アンテナと地面との距離を除外し、前記車両の外部に前記反射体が存在するか否かの判定を行い、前記反射体が存在する場合に前記車両と前記反射体との距離を算出し、
複数の前記車載アンテナ同士の送受信で得られた送受信信号における複数チャネルの複数IQデータから算出した複数の測距値から予め把握しておいた複数の前記車載アンテナ同士間の距離を除外し、前記車両の外部に前記反射体が存在するか否かの判定を行い、前記反射体が存在する場合に前記車両と前記反射体との距離を算出する、請求項1に記載の車両用通信システム。
【請求項3】
前記制御部は、前記車両が停止しかつ前記車両の全てのドアが閉まっているときに、前記車両と前記反射体との距離を算出し、
複数の前記車載アンテナがそれぞれ単独の送受信で測距を行う場合、下記の(式1)を用いて前記車両と前記反射体との距離を算出し、
複数の前記車載アンテナ同士の送受信で測距を行う場合、下記の(式2)を用いて前記車両と前記反射体との距離を算出する、請求項2に記載の車両用通信システム。
TIFF
2025174116000007.tif
12
170
TIFF
2025174116000008.tif
17
170
ただし、Lは、前記車両と前記反射体との距離。
【請求項4】
前記制御部は、前記車両に搭載された複数のソナーセンサ(5)から得られる情報を用いて、前記車両の外部に前記反射体が存在するか否かと、前記車両の外部に前記反射体が存在する場合に前記車両と前記反射体との距離を算出する、請求項1に記載の車両用通信システム。
【請求項5】
前記制御部は、前記車両の外部に前記反射体が存在する場合、
複数の前記車載アンテナと前記携帯機との間でそれぞれ測距した複数の測距値を用いて算出した前記携帯機の位置が、前記車両から見て前記反射体よりも近い場合、その算出された前記携帯機の位置を正しい位置と判定して前記車両の制御を行い、
複数の前記車載アンテナと前記携帯機との間でそれぞれ測距した複数の測距値を用いて算出した前記携帯機の位置が、前記車両から見て前記反射体よりも遠い場合、次の(A)、(B)、(C)の方法で再計算した前記携帯機の第1位置(P1)と第2位置(P2)と第3位置(P3)の少なくとも1つまたは平均値を前記携帯機の正しい位置と判定し前記車両の制御を行う、請求項1ないし3のいずれか1つに記載の車両用通信システム。
(A)「複数の前記車載アンテナのうち所定の前記車載アンテナと前記携帯機との間の無線通信で測距した測距値が、前記反射体で反射した電波で測距したものと想定して補正した補正測距値」と、「複数の前記車載アンテナのうち別の前記車載アンテナと前記携帯機との間の無線通信で測距した測距値が、前記反射体で反射していない電波で測距したものと想定した測距値」とで算出した前記携帯機の位置を前記第1位置とする。
(B)「複数の前記車載アンテナのうち所定の前記車載アンテナと前記携帯機との間の無線通信で測距した測距値が、前記反射体で反射していない電波で測距したものと想定した測距値」と、「複数の前記車載アンテナのうち別の前記車載アンテナと前記携帯機との間の無線通信で測距した測距値が、前記反射体で反射した電波で測距したものと想定して補正した補正測距値」とで算出した前記携帯機の位置を前記第2位置とする。
(C)「複数の前記車載アンテナのうち所定の前記車載アンテナと前記携帯機との間の無線通信で測距した測距値が、前記反射体で反射した電波で測距したものと想定して補正した補正測距値」と、「複数の前記車載アンテナのうち別の前記車載アンテナと前記携帯機との間の無線通信で測距した測距値が、前記反射体で反射した電波で測距したものと想定して補正した補正測距値」とで算出した前記携帯機の位置を前記第3位置とする。
【請求項6】
前記制御部は、前記車両の外部に前記反射体が存在する場合、前記車載アンテナと前記携帯機との間の無線通信で測距した測距値が、前記反射体で反射した電波で測距したものと想定するとき、次の(式3)を用いて補正測距値を算出する、請求項5に記載の車両用通信システム。
TIFF
2025174116000009.tif
13
170
ただし、Rは、前記車載アンテナと前記携帯機との間の無線通信で測距した測距値
x、yは、前記携帯機の座標、即ち、補正測距値
Lは、前記車両と前記反射体との距離
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両のユーザーが携帯する携帯機と無線通信を行うことで携帯機の位置を検出する車両用通信システムに関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、スマートフォンなどの携帯機を監視空間内に持ち込んだ人物を特定するシステムが開示されている。このシステムは、人物が携帯機を所持していると仮定した場合にその携帯機から発信されて受信装置で受信される電波の理論値と、実際に受信装置で受信される電波の実測値との差分が所定値より小さい場合、その人物が携帯機を所持していると判定するものである。
【先行技術文献】
【特許文献】
【0003】
特開2020-063961号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術は、携帯機から発信されて受信装置で受信される電波の理論値を算出するため、監視空間内の反射体の位置、反射体による電波の反射率、受信装置の位置などを予め把握しておく必要がある。そのため、この技術は、反射体の位置、反射体による電波の反射率、受信装置の位置などが固定された監視空間内のみに適用される。それに対し、車両のユーザーが携帯する携帯機の位置を検出する車両用通信システムでは、携帯機の電波を反射する反射体の有無、および、反射体と車両との距離が、車両の周辺環境によって変化する。そのため、車両用通信システムに対し、特許文献1に記載の技術は何ら参考にならない。
【0005】
本開示は上記点に鑑みて、車両用通信システムにおいて、携帯機の位置の検出精度を向上することを目的とする。
【課題を解決するための手段】
【0006】
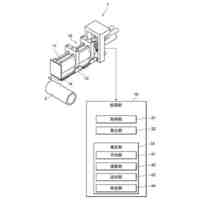
本開示の1つの観点によると、車両(1)のユーザー(2)が携帯する携帯機(3)と無線通信を行い、携帯機の位置を検出して車両の制御を行う車両用通信システムは、
車両に搭載され、所定の帯域の電波を送受信する複数の車載アンテナ(10)と、
複数の車載アンテナによる送受信を制御する制御部(20)と、を備え、
制御部は、
車両の外部に所定の帯域の電波を反射する反射体(4)が存在するか否かを判定し、
車両の外部に反射体が存在しない場合、複数の車載アンテナと携帯機との間の無線通信でそれぞれ測距した複数の測距値を用いて携帯機の位置を算出し、
車両の外部に反射体が存在する場合、車両と反射体との距離(L)を算出し、複数の車載アンテナと携帯機との間の無線通信でそれぞれ測距した複数の測距値と、車両と反射体との距離とを用いて携帯機の位置を算出する。
【0007】
これによれば、制御部は、車両の外部に反射体が存在するか否かを判定することで、反射体が存在しない場合と、反射体が存在する場合の両方において、携帯機の位置を高精度に算出できる。さらに、車両の外部に反射体が存在する場合、制御部は、車載アンテナと携帯機との無線通信で得られた測距値が反射体で反射した反射波によるものであっても、車両と反射体との距離を用いることで、携帯機の位置を高精度に検出できる。したがって、この車両用通信システムは、携帯機の正確な位置に応じた車両制御を実行できる。
【0008】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0009】
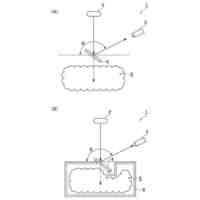
第1実施形態に係る車両用通信システムが搭載された車両と、ユーザーが携帯する携帯機と、反射体を示す模式図である。
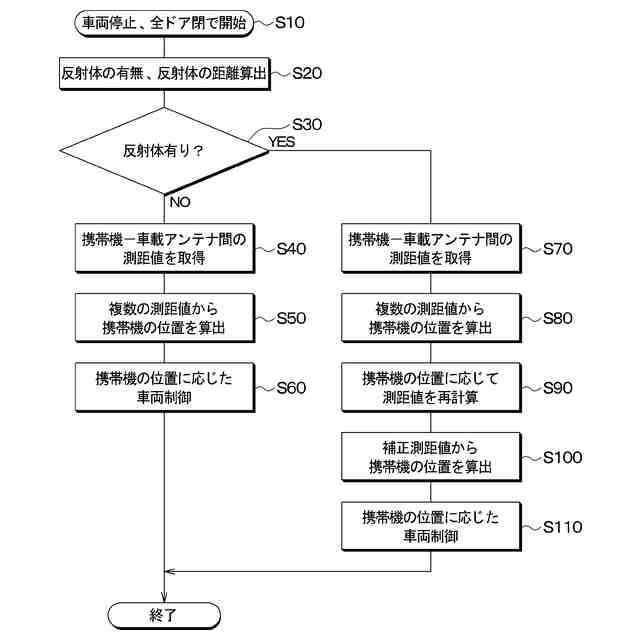
第1実施形態に係る車両用通信システムが備える制御部が実行する制御処理を示すフローチャートである。
図2のS20の処理を詳細に示したフローチャートである。
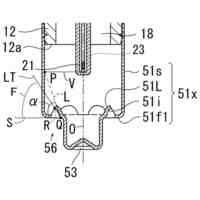
単独の車載アンテナの送受信による反射体の測距について説明するための説明図である。
車載アンテナの正面に反射体が存在しない場合の「測距値-頻度」の分布図である。
車載アンテナの正面に反射体が存在する場合の「測距値-頻度」の分布図である。
複数の車載アンテナ同士の送受信による反射体の測距について説明するための説明図である。
複数の車載アンテナの間の領域に反射体が存在しない場合の「測距値-頻度」の分布図である。
複数の車載アンテナの間の領域に反射体が存在する場合の「測距値-頻度」の分布図である。
図2のS50の処理を説明するための説明図である。
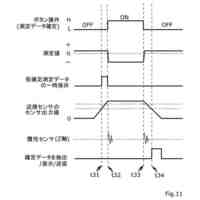
図2のS80~S110の処理を詳細に示したフローチャートである。
図11のS901の処理を説明するための説明図である。
式3について説明するための説明図である。
図11のS903の処理を説明するための説明図である。
図11のS904の処理を説明するための説明図である。
図11のS905の処理を説明するための説明図である。
第2実施形態に係る車両用通信システムが搭載された車両と、反射体を示す模式図である。
式4および式5について説明するための説明図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態について図面を参照しつつ説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付し、その説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SOKEN
画像処理装置
2日前
株式会社SOKEN
電力変換装置
23日前
株式会社SOKEN
生体情報検出装置
2日前
株式会社SOKEN
実設備仮想化装置
23日前
株式会社SOKEN
車両用通信システム
2日前
株式会社SOKEN
試験方法及び試験装置
24日前
日本精機株式会社
検出装置
25日前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
20日前
日本精機株式会社
発光表示装置
3日前
株式会社ミツトヨ
測定器
1か月前
株式会社カクマル
境界杭
10日前
甲神電機株式会社
電流検出装置
25日前
株式会社トプコン
測量装置
2日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
20日前
双庸電子株式会社
誤配線検査装置
26日前
個人
計量具及び計量機能付き容器
20日前
日本特殊陶業株式会社
ガスセンサ
18日前
大和製衡株式会社
組合せ計量装置
1か月前
個人
非接触による電磁パルスの測定方法
23日前
日本特殊陶業株式会社
ガスセンサ
2日前
大和製衡株式会社
組合せ計量装置
1か月前
個人
システム、装置及び実験方法
1か月前
愛知電機株式会社
軸部材の外観検査装置
1か月前
愛知時計電機株式会社
ガスメータ
1か月前
日本信号株式会社
距離画像センサ
23日前
キーコム株式会社
画像作成システム
10日前
日本特殊陶業株式会社
センサ
1か月前
日本特殊陶業株式会社
センサ
4日前
株式会社タイガーカワシマ
揚穀装置
2日前
日東精工株式会社
振動波形検査装置
26日前
個人
液位検視及び品質監視システム
18日前
株式会社不二越
X線測定装置
23日前
トヨタ自動車株式会社
測定システム
1か月前
株式会社電巧社
試験装置及び試験方法
26日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ