TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025174100
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024080162
出願日
2024-05-16
発明の名称
位置ズレ検知システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G01B
11/00 20060101AFI20251120BHJP(測定;試験)
要約
【課題】カメラの位置ズレの検知精度を高くする。
【解決手段】カメラを用いた検査における前記カメラの位置ズレ検知システムであって、輪郭形状が円であるマーカの前記カメラによる撮影画像において、マーカ画像の輪郭形状が円又は楕円のどちらであるかを判断する判断部と、前記マーカ画像の輪郭形状が楕円である場合に、該楕円の2つの焦点の位置を行列計算に利用する検知部と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
カメラを用いた検査における前記カメラの位置ズレ検知システムであって、
輪郭形状が円であるマーカの前記カメラによる撮影画像において、マーカ画像の輪郭形状が円又は楕円のどちらであるかを判断する判断部と、
前記マーカ画像の輪郭形状が楕円である場合に、該楕円の2つの焦点の位置を行列計算に利用する検知部と、を有する、位置ズレ検知システム。
続きを表示(約 200 文字)
【請求項2】
前記撮影画像のディストーションを補正する補正部を有し、
前記判断部は、前記補正部により前記ディストーションが補正された前記撮影画像において、前記マーカ画像の輪郭形状が円又は楕円のどちらであるかを判断する、請求項1に記載の位置ズレ検知システム。
【請求項3】
前記検査は、機械学習による検査である、請求項1又は請求項2に記載の位置ズレ検知システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置ズレ検知システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば、特許文献1には、輪郭形状が円であるマーカを斜め方向から撮影したときに得られる輪郭形状が楕円であるマーカ画像を用いて、カメラの位置ズレを検知する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平07-098208号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、カメラの位置ズレの検知精度に改善の余地がある。
【課題を解決するための手段】
【0005】
上述した課題を解決するために、一実施形態に係る位置ズレ検知システムは、カメラを用いた検査における前記カメラの位置ズレ検知システムであって、輪郭形状が円であるマーカの前記カメラによる撮影画像において、マーカ画像の輪郭形状が円又は楕円のどちらであるかを判断する判断部と、前記マーカ画像の輪郭形状が楕円である場合に、該楕円の2つの焦点の位置を行列計算に利用する検知部と、を有する。
【発明の効果】
【0006】
一実施形態に係る位置ズレ検知システムによれば、カメラの位置ズレの検知精度を高くすることができる。
【図面の簡単な説明】
【0007】
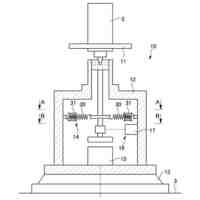
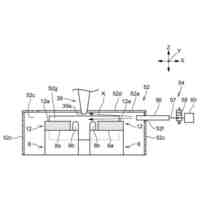
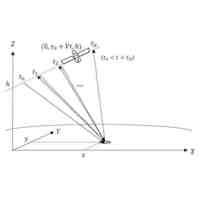
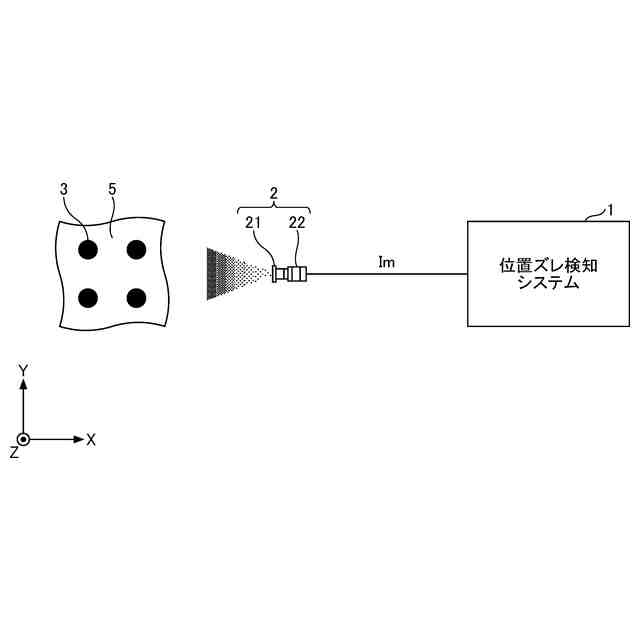
一実施形態に係る位置ズレ検知システムの構成の一例を示す模式図である。
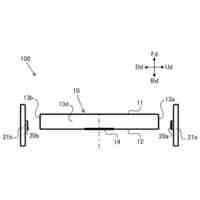
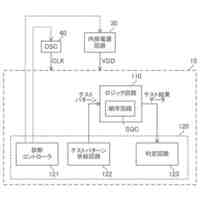
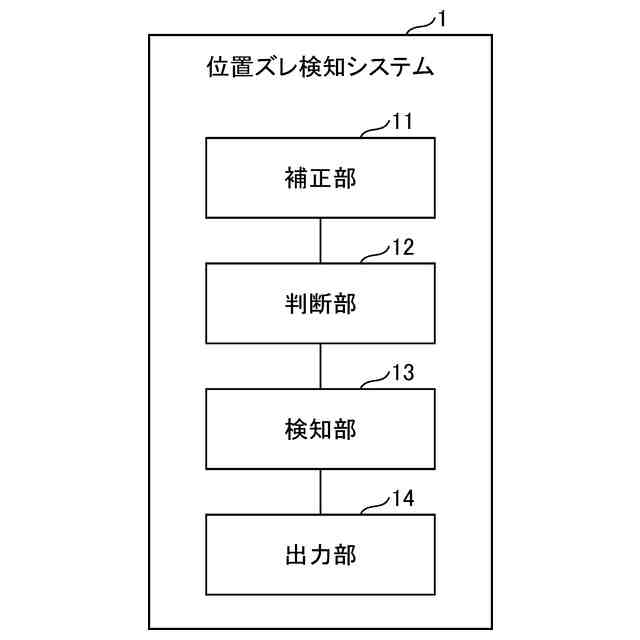
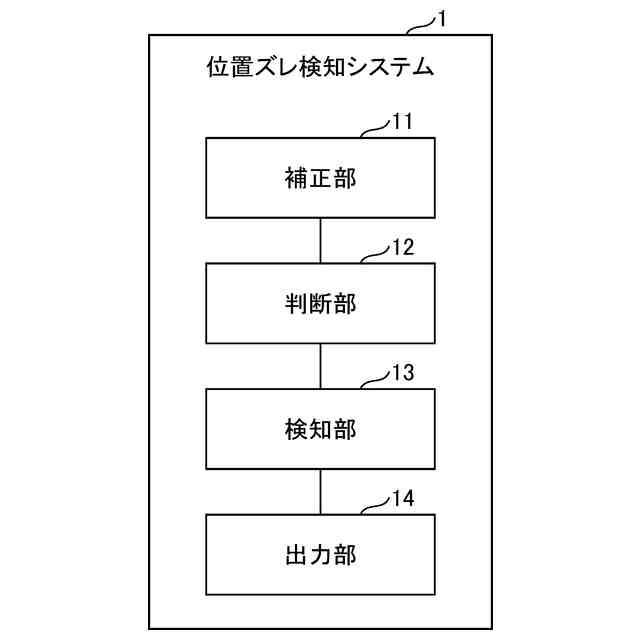
一実施形態に係る位置ズレ検知システムの機能構成の一例を示すブロック図である。
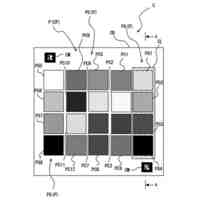
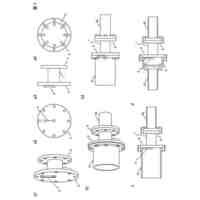
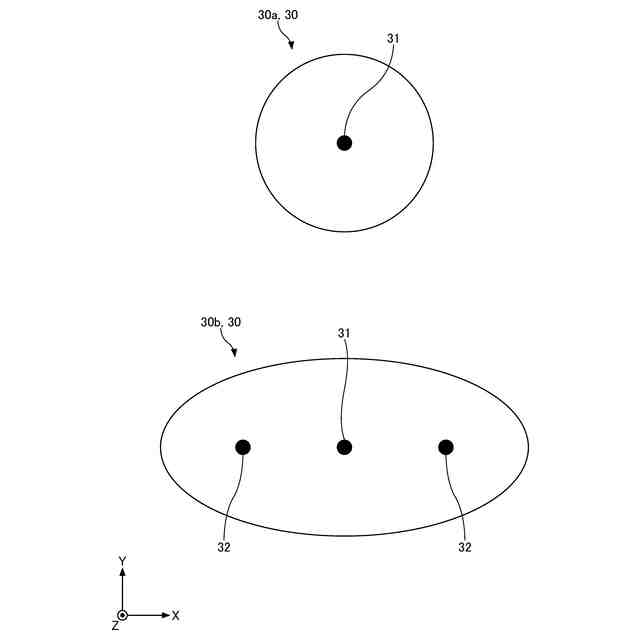
マーカ画像の輪郭形状の一例を示す図である。
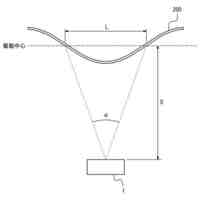
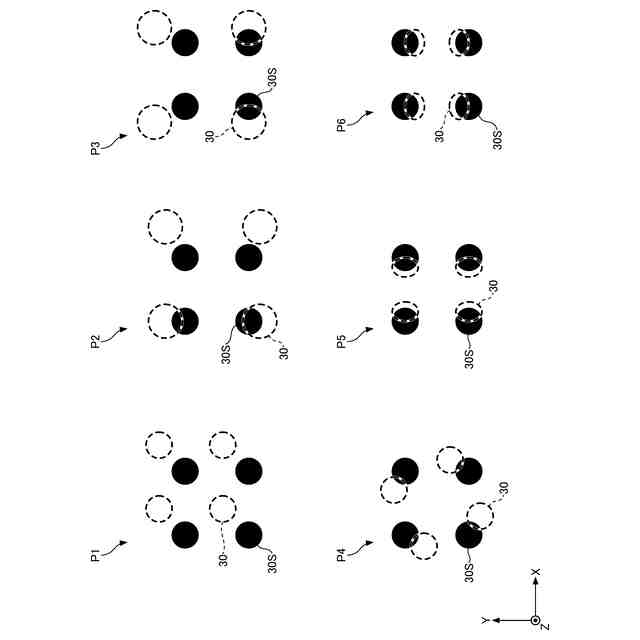
マーカ画像の位置ズレの一例を示す図である。
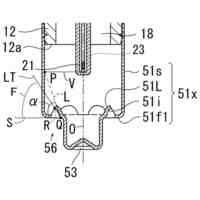
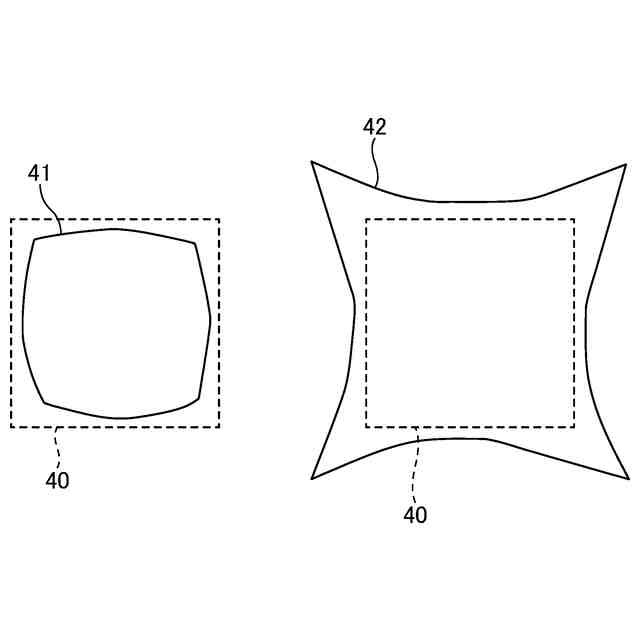
ディストーションの一例を示す図である。
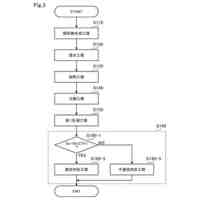
一実施形態に係る位置ズレ検知システムによる処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の一実施形態について添付の図面を参照しながら説明する。なお、本明細書および図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複した説明を省略する。また、以下に示す図において、方向表現として、XYZ直交座標系を用いる場合がある。
【0009】
<一実施形態に係る位置ズレ検知システムの構成>
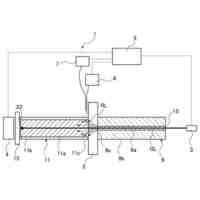
図1は、一実施形態に係る位置ズレ検知システム1の構成の一例を示す模式図である。図2は、位置ズレ検知システム1の機能構成の一例を示すブロック図である。図3は、マーカ画像30の輪郭形状の一例を示す図である。図4は、マーカ3の位置ズレの一例を示す図である。図5は、ディストーションの一例を示す図である。
【0010】
位置ズレ検知システム1は、カメラ2を用いた検査におけるカメラ2の位置ズレを検知するシステムである。例えば、カメラ2を用いた検査では、カメラ2は、産業用ロボットに配置される。カメラ2は、産業用ロボットにより三次元空間を6自由度で移動する。6自由度は、X軸、Y軸及びZ軸それぞれに沿う方向にカメラ2が移動する3自由度と、X軸、Y軸及びZ軸のそれぞれを回転中心にしてカメラ2が回転する3自由度と、を含む。カメラ2は、所定の撮影位置において停止し、停止した状態で対象物を撮影する。カメラ2による対象物の撮影画像に基づき、対象物の検査が行われる。対象物は、例えば、鋳造法で加工された部品である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
計量機能付き容器
18日前
株式会社カクマル
境界杭
8日前
日本精機株式会社
発光表示装置
1日前
株式会社トプコン
測量装置
今日
大成建設株式会社
風洞実験装置
18日前
日本特殊陶業株式会社
ガスセンサ
16日前
個人
計量具及び計量機能付き容器
18日前
日本特殊陶業株式会社
ガスセンサ
今日
日本信号株式会社
距離画像センサ
21日前
個人
液位検視及び品質監視システム
16日前
キーコム株式会社
画像作成システム
8日前
日本特殊陶業株式会社
センサ
2日前
株式会社タイガーカワシマ
揚穀装置
今日
株式会社エルメックス
希釈液収容容器
18日前
理研計器株式会社
ガス検知装置
8日前
株式会社川島製作所
海苔の異物検査装置
14日前
合同会社画像技術研究所
カラーチャート
14日前
株式会社アイシン
回転角検出装置
8日前
京セラ株式会社
振動検出方法
1日前
株式会社イシダ
計量装置
8日前
シチズンファインデバイス株式会社
外形検査装置
17日前
株式会社ディスコ
試験装置、及び、試験方法
1日前
矢崎総業株式会社
光ファイバ型センサ
1日前
株式会社日立製作所
演算装置
今日
レーザーテック株式会社
光学装置及び計測方法
8日前
株式会社イシダ
組合せ計量装置
14日前
株式会社日立ハイテク
ガスセンサ
16日前
個人
合成開口レーダシステム
2日前
株式会社ハシマ
検針機および検針システム
今日
ローム株式会社
半導体装置
16日前
トヨタ自動車株式会社
位置ズレ検知システム
今日
株式会社IHI
判定方法
8日前
イエローテイル・ナビゲーション株式会社
衛星航法受信機
8日前
株式会社小野測器
トルク計
今日
花王株式会社
バイオセンサー
21日前
株式会社小野測器
測定装置
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ