TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025172698
公報種別
公開特許公報(A)
公開日
2025-11-26
出願番号
2025076919
出願日
2025-05-02
発明の名称
自律車両の停車位置変更
出願人
ウェイモ エルエルシー
代理人
個人
,
個人
主分類
G08G
1/09 20060101AFI20251118BHJP(信号)
要約
【課題】自律車両の停車位置変更を提供する。
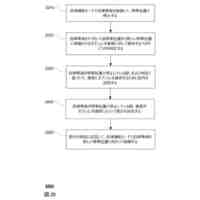
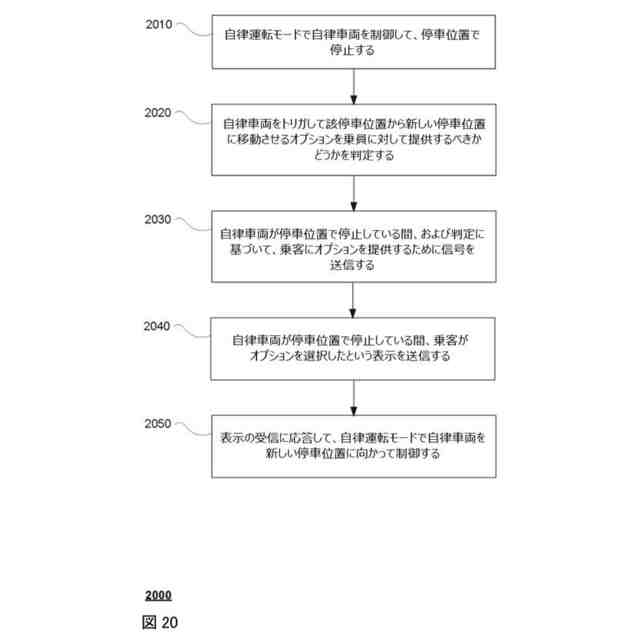
【解決手段】例えば、自律車両は、自律運転モードで制御されて、停車位置で停止することができる。乗客に、自律車両を運転席の位置から新しい停車位置へ移動させるオプションを提供するべきかどうかが判定され得る。車両が停車位置で停止している間、および判定に基づいて、乗客にオプションを提供するために信号が送信されてもよく、車両が停車位置で停止している間、乗客がオプションを選択したという表示が受信される。表示の受信に応答して、車両は、自律運転モードにおいて新しい停車位置に制御されてもよい。
【選択図】図20
特許請求の範囲
【請求項1】
方法であって、
1つ以上のプロセッサによって、自律運転モードで自律車両を制御して、停車位置で停止させることと、
前記1つ以上のプロセッサによって、前記自律車両をトリガして前記停車位置から新しい停車位置へ移動させるオプションを乗客に対して提供するべきかどうかを判定することと、
前記自律車両が前記停車位置で停止している間に、前記1つ以上のプロセッサによって、前記乗客に前記オプションを提供するために信号を送信することと、
前記自律車両が前記停車位置で停止している間に、前記1つ以上のプロセッサによって、前記乗客が前記オプションを選択したという表示を受信することと、
前記表示の受信に応答して、前記1つ以上のプロセッサによって、前記自律運転モードの前記自律車両を新しい停車位置に向かわせる制御することと、を含む、方法。
続きを表示(約 980 文字)
【請求項2】
前記オプションを前記乗客に提供するべきかどうかを判定することが、前記自律車両が前記停車位置で停止している間に行われる、請求項1に記載の方法。
【請求項3】
前記乗客にオプションを提供するべきかどうかを判定することが、特定のタイプの道路特徴を含むある領域内、又は該領域から所定の距離内の前記停車位置で前記自律車両が停まっているかどうかを判定することを含む、請求項1に記載の方法。
【請求項4】
前記特定のタイプの道路特徴が交差点を含む、請求項3に記載の方法。
【請求項5】
前記特定のタイプの道路特徴が橋を含む、請求項3に記載の方法。
【請求項6】
前記特定のタイプの道路特徴がトンネルを含む、請求項3に記載の方法。
【請求項7】
前記特定のタイプの道路特徴が、鉄道線路を含む、請求項3に記載の方法。
【請求項8】
前記信号を送信することが、前記乗客が前記自律車両の車内にいるときに、前記オプションを前記自律車両のディスプレイ上に表示させる、請求項1に記載の方法。
【請求項9】
前記信号を送信することが、前記オプションを、前記乗客が前記自律車両の車内にいないときに、前記乗客のクライアントコンピューティングデバイスのディスプレイ上に表示させる、請求項1に記載の方法。
【請求項10】
1つ又は複数のプロセッサを含むシステムであって、該1つ又は複数のプロセッサが、
自律運転モードで自律車両を制御して、停車位置で停止させることと、
前記自律車両を誘導して前記停車位置から新しい停車位置へ移動させるオプションを乗客に対して提供するべきかどうかを判定することと、
前記自律車両が前記停車位置で停止している間に、前記判定に基づいて、前記オプションを前記乗客に提供するために信号を送信することと、
前記自律車両が前記停車位置で停止している間、前記乗客が前記オプションを選択したという表示を受信することと、
前記表示の受信に応答して、前記自律運転モードで前記自律車両を新しい停車位置に制御することと、を実行するように構成されている、システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
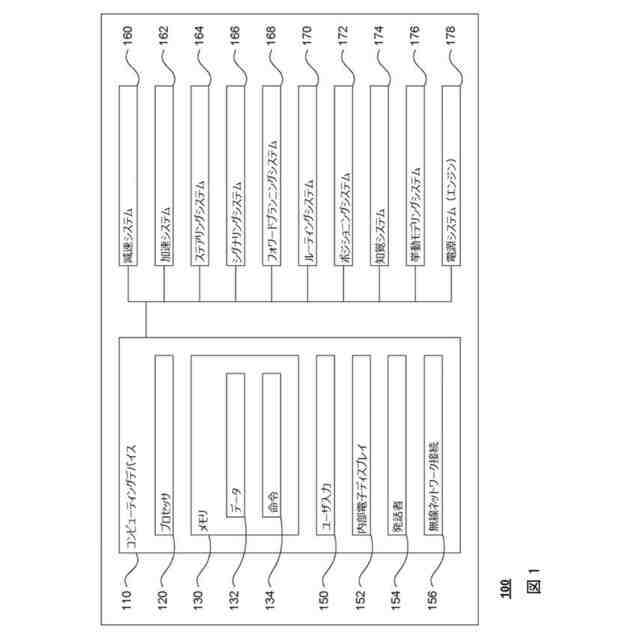
例えば、自律車両、例えば、人間の運転者を必要としない場合がある車両は、ある場所から別の場所への、乗客、又は品目の輸送を支援するために使用され得る。こうした車両は、完全に自律的なモードで動作してもよく、乗客は、ピックアップ位置、又は目的地の場所などの、何らかの初期入力を提供してもよく、自律車両は、その位置にそれ自体を操作する。自律車両は、周囲の物体を検出するために、様々なタイプのセンサを装備している。例えば、自律車両は、ソナー、レーダー、カメラ、Lidar、及び自律車両の周囲に関するデータをスキャン、生成、及び/又は記録する他のデバイスを含み得る。このデータを、自律車両が、周囲を通って、それ自体を操作するために、軌道のプランニングを可能にするために、事前に保存された地図情報と組み合わせ得る。
続きを表示(約 4,100 文字)
【0002】
一部の実例では、自律車両は、乗客が自律車両に乗り降りするのに不便な場所で、乗客を乗車させる又は降ろすために路肩に寄せて、停車することがある。これは、移動中にユーザが停車位置を選択した時(例えば、車両が停車する場所を「伝えた」場合)でも起こり得る。こうした場所を不都合な場所と決めるものは、自律車両のすぐ外側の水たまり、多い交通量、多い人通り、又は自律車両のドアを開くことを困難にし得る自律車両の隣の何らかの物体(例えば、壁、植物、ごみ箱、ゴミなど)がある場所などが挙げられる。同様に、乗客は、乗客が降ろす荷物や鞄を有する場合や、車の座席を取り外す場合など、特定の状況で、乗降するためにさらに空間を必要とする場合がある。
【発明の概要】
【0003】
本開示の態様は、方法を提供する。本方法は、1つ以上のプロセッサによって、自律運転モードで自律車両を制御して、停車位置で停止させることと、前記1つ又は複数のプロセッサによって、前記自律車両をトリガして前記停車位置から新しい停車位置へ移動させるオプションを乗客に対して提供するべきかどうかを判定することと、前記自律車両が前記停車位置で停止している間に、前記1つ以上のプロセッサによって、前記乗客に前記オプションを提供するために信号を送信することと、前記自律車両が前記停車位置で停止している間に、前記1つ又は複数のプロセッサによって、前記乗客が前記オプションを選択したという表示を受信することと、前記表示の受信に応答して、前記1つ以上のプロセッサによって、前記自律運転モードの前記自律車両を新しい運転位置に向かわせる制御することと、を含む。
【0004】
1つの例では、前記オプションを前記乗客に提供するべきかどうかを判定することが、前記自律車両が前記停車位置で停止している間に行われる。他の例では、前記乗客にオプションを提供するべきかどうかを判定することが、特定のタイプの道路特徴を含むある領域内、又は該領域から所定の距離内の前記停車位置で前記自律車両が停まっているかどうかを判定することを含む。この実施例では、ある特定のタイプの道路特徴は交差点を含む。追加的に、又は代替的に、ある特定のタイプの道路特徴は橋を含む。追加的に、又は代替的に、ある特定のタイプの道路特徴はトンネルを含む。追加的に、又は代替的に、ある特定のタイプの道路特徴は、鉄道線路を含む。他の例では、前記信号を送信することが、前記乗客が前記自律車両の車内にいるときに、前記オプションを前記自律車両のディスプレイ上に表示させる。他の例では、前記信号を送信することが、前記オプションを、前記乗客が前記自律車両の車内にいないときに、前記乗客のクライアントコンピューティングデバイスのディスプレイ上に表示させる。
【0005】
本開示の別の態様は、1つ又は複数のプロセッサを備えるシステムを提供する。該1つ又は複数のプロセッサは、自律運転モードで自律車両を制御して、停車位置で停止させることと、前記自律車両を誘導して前記停車位置から新しい停車位置へ移動させるオプションを乗客に対して提供するべきかどうかを判定することと、前記自律車両が前記到着位置で停止している間に、前記判定に基づいて、前記オプションを前記乗客に提供するために信号を送信することと、前記自律車両が前記停車位置で停止している間、前記乗客が前記オプションを選択したという表示を受信することと、前記表示の受信に応答して、前記自律運転モードで前記自律車両を新しい運転位置に制御することと、を実行するように構成されている。
【0006】
1つの例では、前記1つ又は複数のプロセッサは、自律車両が停車位置で停止している間に、乗客にオプションが提供されるべきかどうかを判定するようにさらに構成されている。他の例では、前記1つ又は複数のプロセッサは、前記自律車両が、ある特定のタイプの道路特徴を含むある領域内、又は該領域から所定の距離内の前記停車位置で停まっているかどうかを判定することによって、前記乗客にオプションを提供するべきかどうかを判定するようにさらに構成されている。この実施例では、ある特定のタイプの道路特徴は交差点を含む。追加的に、又は代替的に、ある特定のタイプの道路特徴は橋を含む。追加的に、又は代替的に、ある特定のタイプの道路特徴はトンネルを含む。追加的に、又は代替的に、ある特定のタイプの道路特徴は、鉄道線路を含む。他の例では、前記1つ又は複数のプロセッサは、前記信号を送信し、それによって、前記乗客が前記自律車両の車内にいるときに、前記自律車両のディスプレイ上に前記オプションを表示させるようにさらに構成されている。他の例では、前記1つ又は複数のプロセッサは、前記信号を送信し、それによって、前記乗客が前記自律車両内にいないときに、前記乗客のクライアントコンピューティングデバイスのディスプレイ上に前記オプションを表示させるようにさらに構成されている。別の実施例では、システムは自律車両も含む。
【図面の簡単な説明】
【0007】
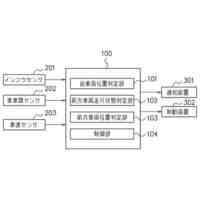
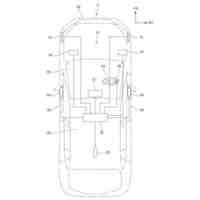
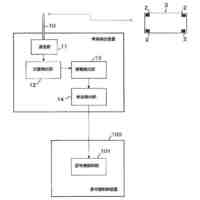
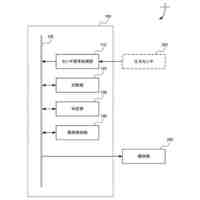
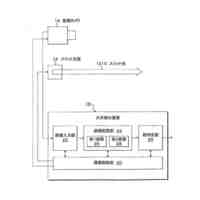
図1は、例示的実施形態に従う、例示的車両の機能図である。
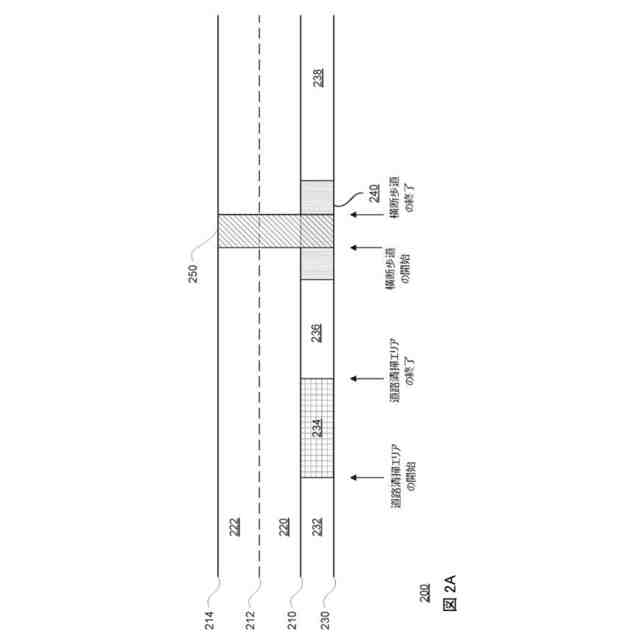
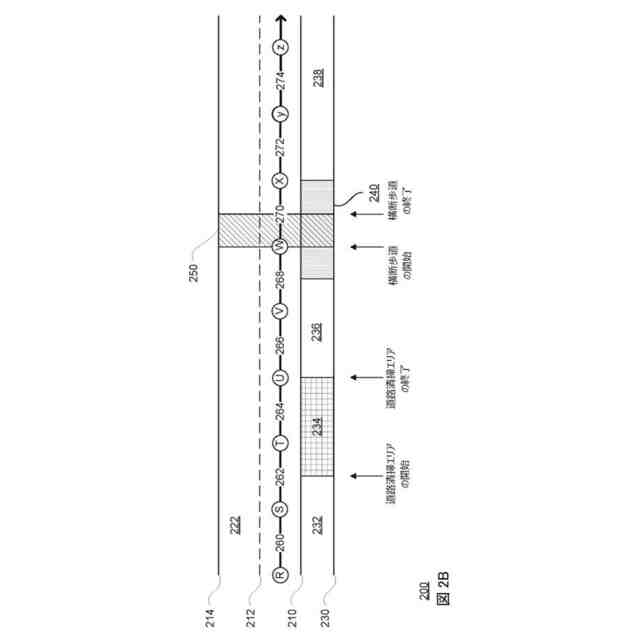
図2A~図2Bは、本開示の態様による、地図情報の例である。
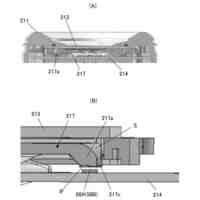
図3A~図3Bは、本開示の態様による、車両の例示的な外部図である。
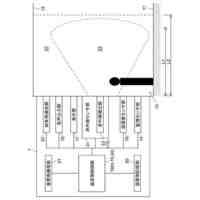
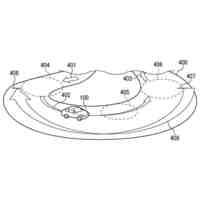
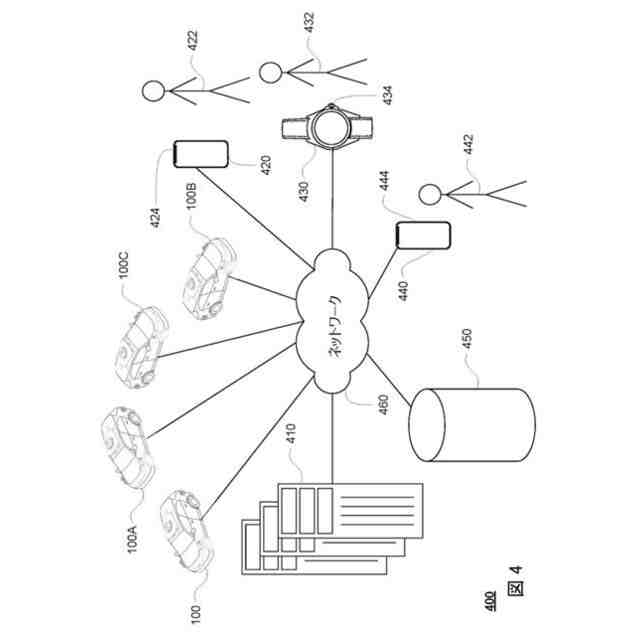
図4は、本開示の態様による、例示的なシステムの絵図である。
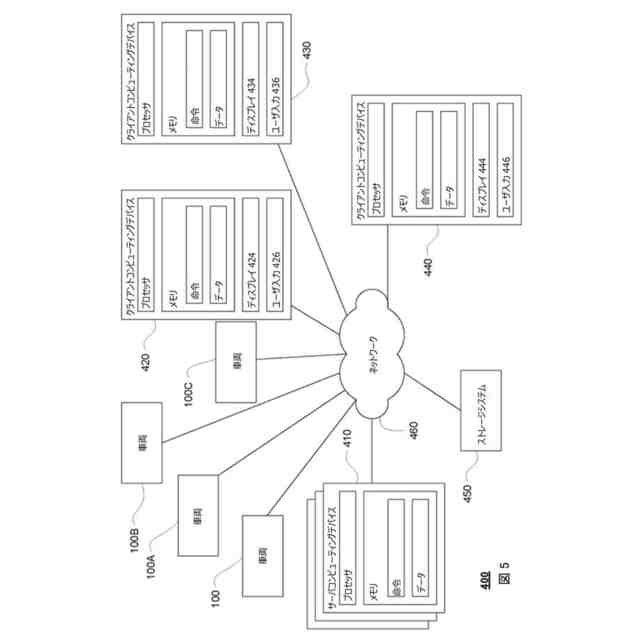
図5は、本開示の態様による、図4のシステムの機能図である。
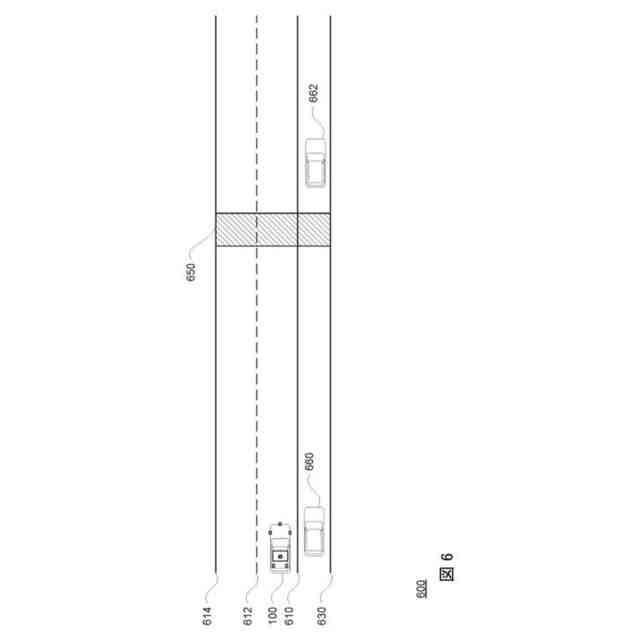
図6は、本開示の態様による、地理的領域および目的地の場所を表すマーカーの例である。
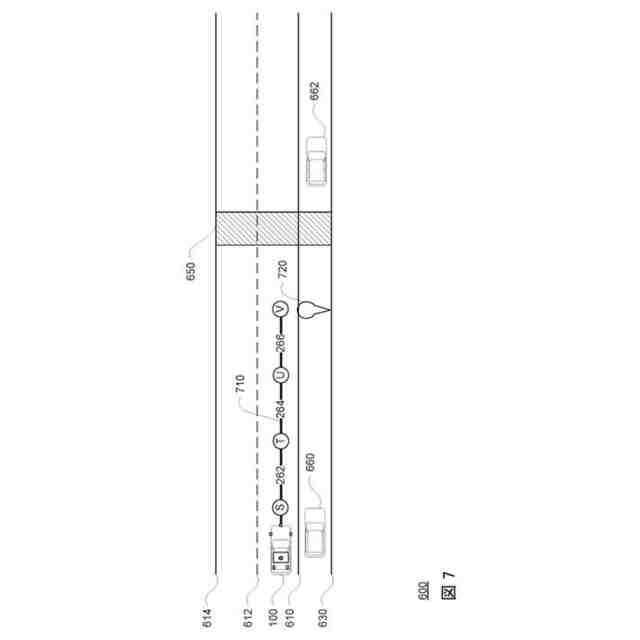
図7は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、および経路の例である。
図8は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、およびベースラインの例である。
図9は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、ベースライン、および分割領域の例である。
図10は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、ベースライン、および様々な領域の実施例である。
図11は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、ベースライン、様々な領域、および一組の停車位置候補の例である。
図12は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、ベースライン、様々な領域、および一組の停車位置候補の例である。
図13は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、経路、および停車位置の例である。
図14は、本開示の態様による、地理的領域の例である。
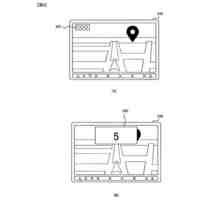
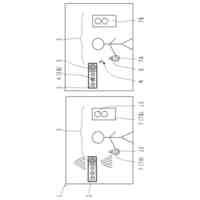
図15は、本開示の態様による、例示的な画像表示及びクライアントコンピューティングデバイスである。
図16は、本開示の態様による、例示的な画像表示及びクライアントコンピューティングデバイスである。
図17は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、および停車位置候補の例である。
図18は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、経路、および停車位置の例である。
図19は、本開示の態様による、地理的領域、目的地の場所を表すマーカー、および停車位置の例である。
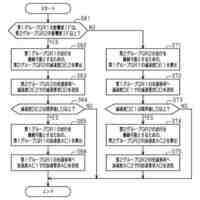
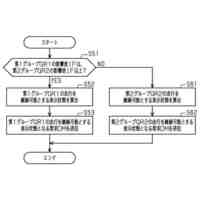
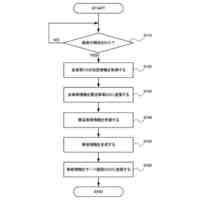
図20は、本開示の態様による、例示的なフロー図である。
【発明を実施するための形態】
【0008】
概要
本技術は、自律車両の乗客が自律車両の停車位置を変更することを可能にすることに関する。一部の実例では、自律車両は、乗客が自律車両に乗り降りするのに不便な場所で、乗客を乗車させる又は降ろすために路肩に寄せて、停車することがある。これは、移動中にユーザが停車位置を選択した場合(例えば、車両が停車する場所を「伝えた」場合)でも起こり得る。こうした場所を不都合な場所と決めるものは、自律車両のすぐ外側の水たまり、多い交通量、多い人通り、又は自律車両のドアを開くことを困難にし得る自律車両の隣の何らかの物体(例えば、壁、植物、ごみ箱、ゴミなど)がある場所などが挙げられる。同様に、乗客は、乗客が降ろす荷物や鞄を有する場合や、車の座席を取り外す場合など、特定の状況で、降車するためにさらに空間を必要とする場合がある。これに対処するために、乗客に、自律車両を新しい位置に移動させ、乗客が自律車両に乗降することを可能にするオプションが提供する構成であってもよい。
【0009】
いくつかのシステムは、その現在の停車位置が他の道路利用者を妨げている場合、自律車両が移動することを可能にする構成であってもよい。例えば、自律車両のコンピューティングデバイスが、該自律車両が別の道路利用者を妨げていると判定する場合、これは、移動リクエストをリモートコンピューティングデバイスに送信するために使用され得る。当然のことながら、当該他の道路利用者は、誤検知の状況を回避するために、自律車両の近くにいなければならない場合がある。
【0010】
例えば、自律車両は、自律車両の停車位置が、他の道路利用者が自律車両を避けて通り過ぎる、もしくは避けて運転するのを妨げるか、又は何らかの所定の期間を超えて、「通過できない状況」を引き起こす場合に、別の道路利用者を妨げていると判定され得る。こうした状況では、自律車両は、特定のタイプの車両を区別する構成であってもよい。例えば、所定の期間は、異なるタイプの車両に対して異なってもよい。再び、自律車両が他の道路利用者を妨げていると判定されると、コンピューティングデバイスは、移動要求を送信する構成であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ウェイモ エルエルシー
自律車両の停車位置変更
10日前
ウェイモ エルエルシー
光検出および測距(LiDAR)装置ならびにカメラにおける欠陥検出のための時間的に変調された光の放射
1か月前
日本精機株式会社
警報システム
3か月前
個人
安全支援装置
1か月前
株式会社SUBARU
車両
1か月前
個人
自動電動車椅子
2か月前
エムケー精工株式会社
車両誘導装置
3か月前
スズキ株式会社
運転支援装置
3か月前
ニッタン株式会社
検知器
2か月前
株式会社国際電気
防災システム
3か月前
個人
磁気路上での車両の路線離脱防御
2か月前
ニッタン株式会社
検知器
2か月前
日本無線株式会社
船舶システム
1か月前
日本信号株式会社
車両検知装置
1日前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
株式会社小糸製作所
移動体検出装置
2か月前
トヨタ自動車株式会社
サーバ
1か月前
大阪瓦斯株式会社
音声出力システム
2か月前
トヨタ自動車株式会社
サーバ
2か月前
日本信号株式会社
異常走行検出装置
2か月前
ダイハツ工業株式会社
移動支援装置
1か月前
株式会社SUBARU
運転支援装置
2か月前
株式会社デンソー
運航管理装置
1か月前
株式会社CCT
通信装置及び表示方法
2か月前
日本精機株式会社
報知装置及び報知システム
2か月前
株式会社小糸製作所
車両検出システム
2か月前
三菱自動車工業株式会社
制御システム
2か月前
株式会社 ミックウェア
車内環境制御システム
1か月前
株式会社SUBARU
事故情報収集装置
1か月前
能美防災株式会社
火災感知器
3か月前
株式会社SUBARU
車室内異常検知装置
1か月前
能美防災株式会社
非常伝達装置
3か月前
ホーチキ株式会社
火災検出システム
2か月前
ヨシモトポール株式会社
接近報知システム
3か月前
トヨタ自動車株式会社
通信システム
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ