TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025170123
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2025152458,2023158177
出願日
2025-09-12,2023-09-22
発明の名称
ロボット、制御方法及びプログラム
出願人
カシオ計算機株式会社
代理人
個人
主分類
A63H
11/00 20060101AFI20251107BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】生物感を表現することが可能な電子機器、電子機器の制御方法及びプログラムを提供する。
【解決手段】ロボット200は、所定の複数の仕草を自機に実行させる制御部110を備える。制御部110は、複数の仕草のうちの少なくとも1つの仕草を自機に正確に実行させ、複数の仕草のうちの、少なくとも1つの仕草以外の仕草を自機に不正確に実行させる、または少なくとも1つの仕草を自機に実行させない。制御部110は、少なくとも1つの仕草の数を、自機の状態に基づいて制御する。
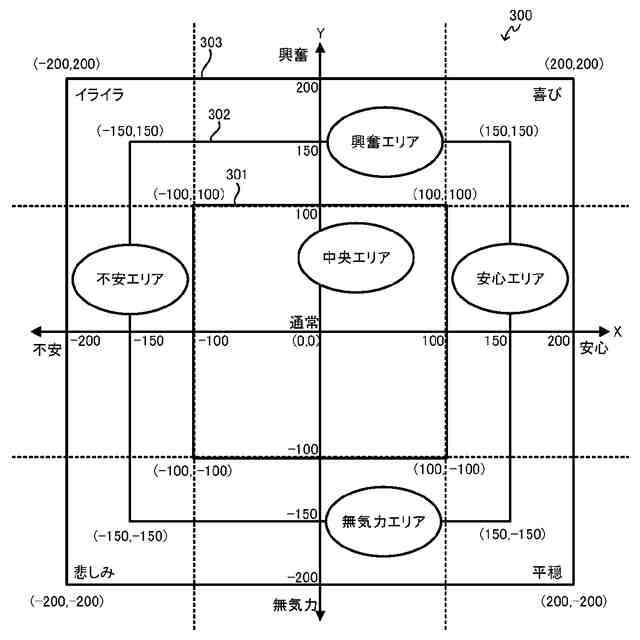
【選択図】図3
特許請求の範囲
【請求項1】
自機に所定の複数の仕草を実行させる制御手段、を備え、
前記制御手段は、
前記複数の仕草のうちの少なくとも1つの仕草を前記自機に正確に実行させ、
前記複数の仕草のうちの、前記少なくとも1つの仕草以外の仕草を前記自機に不正確に実行させ、または前記少なくとも1つの仕草以外の仕草を前記自機に実行させず、
前記少なくとも1つの仕草の数を、前記自機の状態に基づいて制御する、
ことを特徴とする電子機器。
続きを表示(約 1,800 文字)
【請求項2】
前記制御手段は、
前記自機の状態として、前記自機の疑似的な感情を示す感情パラメータと、前記自機の疑似的な性格を表す性格パラメータと、前記自機の電池残量と、前記自機の現在位置と、現在時刻と、のうちの少なくとも1つに基づいて前記少なくとも1つの仕草の数を制御する、
ことを特徴とする請求項1に記載の電子機器。
【請求項3】
前記制御手段は、
前記感情パラメータにおける所定の疑似的な感情の値が大きいほど、前記少なくとも1つの仕草の数が多くなり、前記感情パラメータにおける前記所定の疑似的な感情の値が小さいほど、前記少なくとも1つの仕草の数が少なくなるよう制御する、
ことを特徴とする請求項2に記載の電子機器。
【請求項4】
前記性格パラメータは、それぞれ異なる性格の度合いを表す複数の性格値に基づくものであり、
前記制御手段は、
前記複数の性格値のうちの最も大きい性格値に基づいて前記少なくとも1つの仕草の数を制御する、
ことを特徴とする請求項2又は3に記載の電子機器。
【請求項5】
前記自機に仕草を実行させるための仕草制御情報を取得する取得手段を更に備え、
前記制御手段は、前記取得手段を介して取得した複数の前記仕草制御情報に基づいて、前記自機に複数の仕草を実行させ、
前記少なくとも1つの仕草以外の仕草を前記自機に不正確に実行させる場合、前記少なくとも1つ以外の仕草を実行する速度を前記仕草制御情報に基づく速度とは異なる速度で実行させる、または前記少なくとも1つ以外の仕草を前記仕草制御情報に基づく制御とは異なる制御で実行する、
ことを特徴とする請求項1から3のいずれか1項に記載の電子機器。
【請求項6】
複数の要素により構成された仕草を自機に実行させる制御手段、を備え、
前記制御手段は、
前記複数の要素のうちの少なくとも1つの要素を前記自機に正確に実行させ、
前記複数の要素のうちの、前記少なくとも1つの要素以外の要素を前記自機に不正確に実行させ、または前記少なくとも1つの要素以外の要素を前記自機に実行させず、
前記少なくとも1つの要素の数を、前記自機の状態に基づいて制御する、
ことを特徴とする電子機器。
【請求項7】
前記制御手段は、
前記自機の状態として、前記自機の疑似的な感情を示す感情パラメータと、前記自機の疑似的な性格を表す性格パラメータと、前記自機の電池残量と、前記自機の現在位置と、現在時刻と、のうちの少なくとも1つに基づいて前記少なくとも1つの仕草の数を制御する、
ことを特徴とする請求項6に記載の電子機器。
【請求項8】
前記制御手段は、
前記感情パラメータにおける所定の疑似的な感情の値が大きいほど、前記少なくとも1つの要素の数が多くなり、前記感情パラメータにおける前記所定の疑似的な感情の値が小さいほど、前記少なくとも1つの要素の数が少なくなるよう制御する、
ことを特徴とする請求項7に記載の電子機器。
【請求項9】
前記性格パラメータは、それぞれ異なる性格の度合いを表す複数の性格値に基づくものであり、
前記制御手段は、
前記複数の性格値のうちの最も大きい性格値に基づいて前記少なくとも1つの仕草の数を制御する、
ことを特徴とする請求項7又は8に記載の電子機器。
【請求項10】
前記自機に前記仕草を実行させるための仕草制御情報を取得する取得手段を更に備え、
前記制御手段は、前記取得手段を介して取得した前記仕草制御情報に基づいて、前記自機に前記仕草を実行させ、
前記少なくとも1つの要素以外の要素を前記自機に不正確に実行させる場合、前記少なくとも1つ以外の要素を実行する速度を前記仕草制御情報に基づく速度とは異なる速度で実行させる、または前記少なくとも1つ以外の要素を前記仕草制御情報に基づく制御とは異なる制御で実行する、
ことを特徴とする請求項6から8のいずれか1項に記載の電子機器。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電子機器、電子機器の制御方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ペットや人間等のような生き物を模擬する電子機器が知られている。例えば、特許文献1は、特定入力が与えられたときに当該特定入力と対応付けられた特定動作を発現するロボット装置を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2003-159681号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されたロボット装置は、入力に対する応答が画一的になってしまうため、生物感が失われてしまう。
【0005】
本発明は、以上のような課題を解決するためのものであり、生物感を表現することが可能な電子機器、電子機器の制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明に係る電子機器の第1の態様は、
自機に所定の複数の仕草を実行させる制御手段、を備え、
前記制御手段は、
前記複数の仕草のうちの少なくとも1つの仕草を前記自機に正確に実行させ、
前記複数の仕草のうちの、前記少なくとも1つの仕草以外の仕草を前記自機に不正確に実行させ、または前記少なくとも1つの仕草以外の仕草を前記自機に実行させず、
前記少なくとも1つの仕草の数を、前記自機の状態に基づいて制御する。
【0007】
上記目的を達成するため、本発明に係る電子機器の第2の態様は、
複数の要素により構成された仕草を自機に実行させる制御手段、を備え、
前記制御手段は、
前記複数の要素のうちの少なくとも1つの要素を前記自機に正確に実行させ、
前記複数の要素のうちの、前記少なくとも1つの要素以外の要素を前記自機に不正確に実行させ、または前記少なくとも1つの要素以外の要素を前記自機に実行させず、
前記少なくとも1つの要素の数を、前記自機の状態に基づいて制御する。
【発明の効果】
【0008】
本発明によれば、生物感を表現することが可能な電子機器、電子機器の制御方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0009】
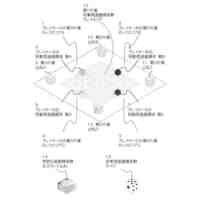
実施形態1に係るロボットシステムの全体構成の概略を示す図である。
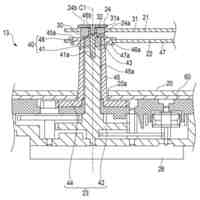
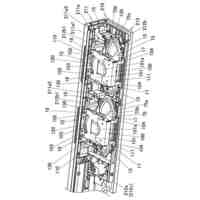
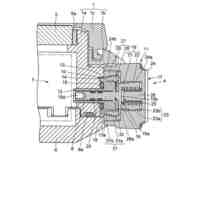
実施形態1に係るロボットを側面から見た断面図である。
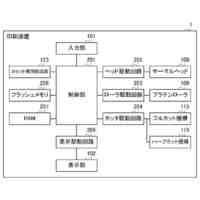
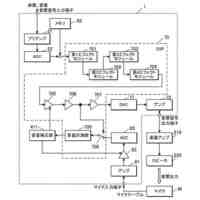
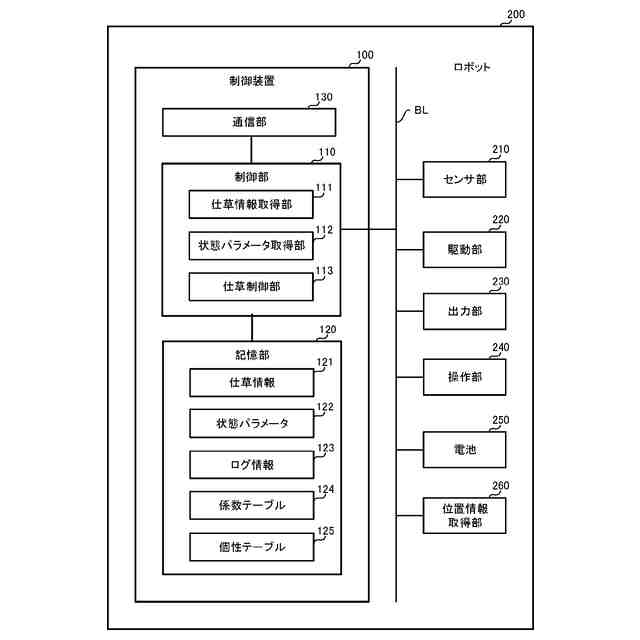
実施形態1に係るロボットの構成を示すブロック図である。
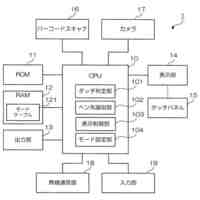
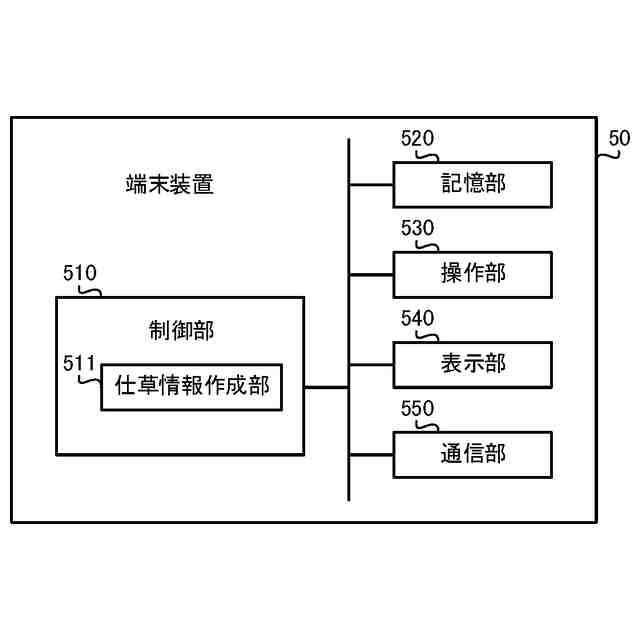
実施形態1に係る端末装置の構成を示すブロック図である。
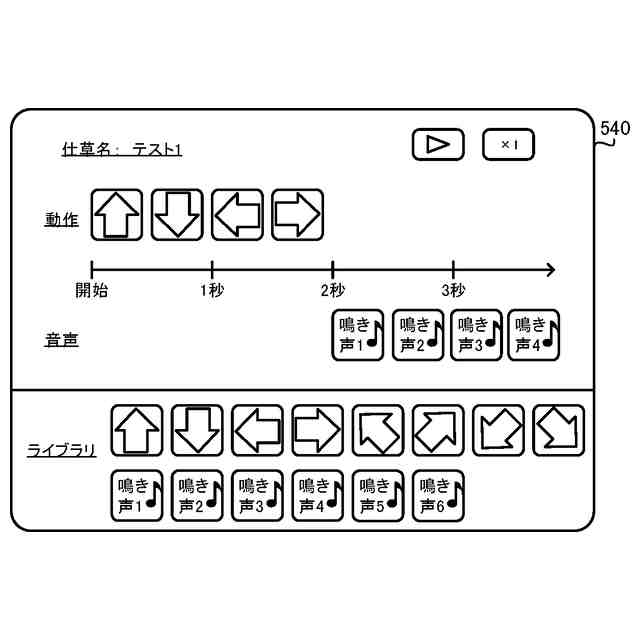
実施形態1に係る仕草情報の作成画面の例を示す図である。
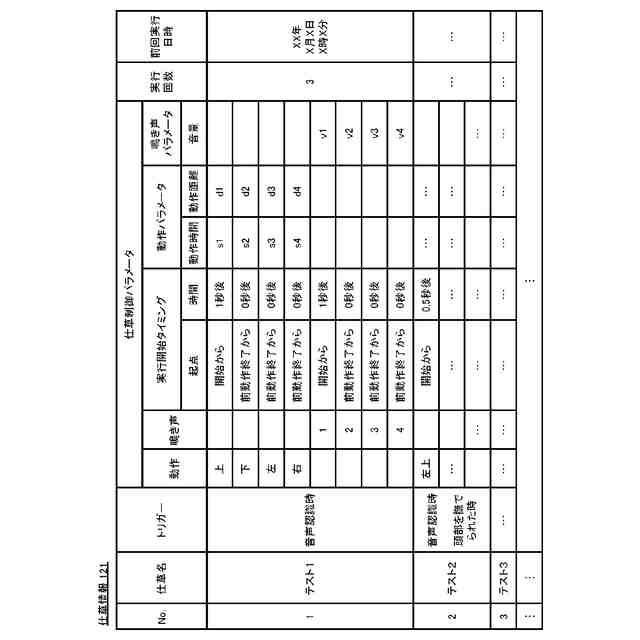
実施形態1に係る仕草情報の例を示す図である。
実施形態1に係る感情マップの例を示す図である。
実施形態1に係る性格値レーダーチャートの例を示す図である。
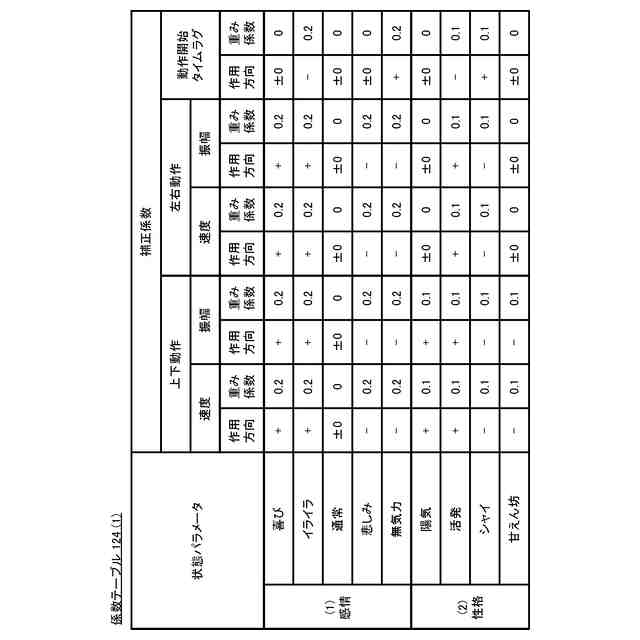
実施形態1に係る係数テーブルの例を示す第1の図である。
実施形態1に係る係数テーブルの例を示す第2の図である。
実施形態1に係る個性テーブルの例を示す図である。
実施形態1に係るロボット制御処理の流れを示すフローチャートである。
実施形態1に係る仕草制御処理の流れを示すフローチャートである。
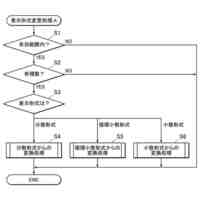
実施形態2に係る仕草制御処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について、図面を参照して説明する。なお、図中同一又は相当する部分には同一符号を付す。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カシオ計算機株式会社
電子装置
1か月前
カシオ計算機株式会社
印刷装置
27日前
カシオ計算機株式会社
光源装置及び投影装置
22日前
カシオ計算機株式会社
プログラム及びデータ処理方法
6日前
カシオ計算機株式会社
調整装置、方法及びプログラム
1か月前
カシオ計算機株式会社
イヤホンデバイス、電子システム
13日前
カシオ計算機株式会社
電子機器、通知制御方法及びプログラム
1か月前
カシオ計算機株式会社
検索装置、検索方法、及び、プログラム
27日前
カシオ計算機株式会社
印刷装置、ラベル作成方法及びプログラム
27日前
カシオ計算機株式会社
電子機器、入力制御方法、及びプログラム
24日前
カシオ計算機株式会社
情報処理装置、情報処理方法、及びプログラム
16日前
カシオ計算機株式会社
情報処理装置、演奏装置、方法およびプログラム
1か月前
カシオ計算機株式会社
ウェアラブル機器、装着判定方法及びプログラム
16日前
カシオ計算機株式会社
電子機器、電源供給状態表示方法およびプログラム
1か月前
カシオ計算機株式会社
時計
13日前
カシオ計算機株式会社
電子鍵盤楽器
15日前
カシオ計算機株式会社
売上データ処理システム、売上データ処理方法、及びプログラム
21日前
カシオ計算機株式会社
カバー付き電子機器
27日前
カシオ計算機株式会社
バンド駒の製造方法
13日前
カシオ計算機株式会社
スイッチ装置および時計
1か月前
カシオ計算機株式会社
スタンド、鍵盤楽器セット
1か月前
カシオ計算機株式会社
電子楽器、方法およびプログラム
6日前
カシオ計算機株式会社
ロボット、制御方法及びプログラム
6日前
カシオ計算機株式会社
ロボット、制御方法及びプログラム
6日前
カシオ計算機株式会社
表示形式変更方法、電子機器及びプログラム
今日
カシオ計算機株式会社
情報処理装置、情報制御方法、及び、プログラム
23日前
カシオ計算機株式会社
音量制御装置、電子楽器、音量制御方法及びプログラム
1か月前
個人
玩具
4か月前
個人
玩具
2か月前
個人
自走玩具
2か月前
個人
小型卓球台
23日前
個人
運動補助具
4か月前
個人
ゲーム玩具
6か月前
個人
パズル
24日前
個人
打撃練習用具
1か月前
株式会社三共
遊技機
4か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ