TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025169164
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2025060395
出願日
2025-04-01
発明の名称
遠心力ポンプのためのポンプ・ユニット及び遠心力ポンプ
出願人
レヴィトロニクス ゲーエムベーハー
,
Levitronix GmbH
代理人
弁理士法人浅村特許事務所
主分類
F04D
13/02 20060101AFI20251105BHJP(液体用容積形機械;液体または圧縮性流体用ポンプ)
要約
【課題】ポンプ・ユニットと、第1の軸方向端部から第2の軸方向端部まで軸方向に延びるステータと、を備える遠心力ポンプのためのポンプ・ユニットを提供する。
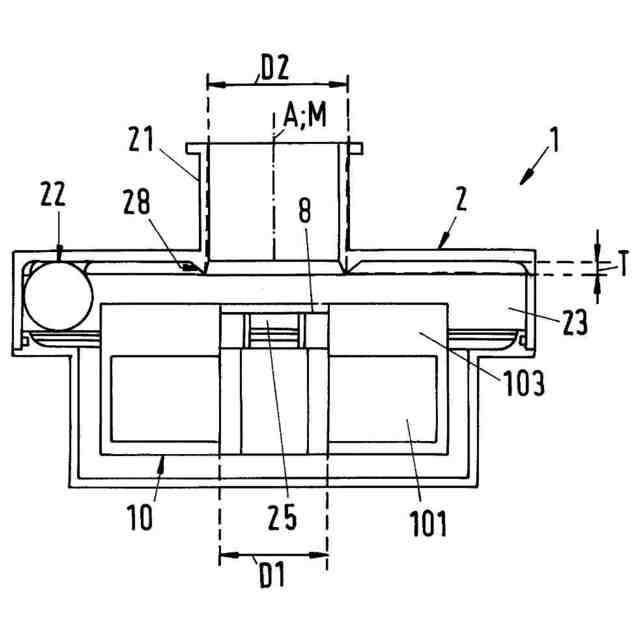
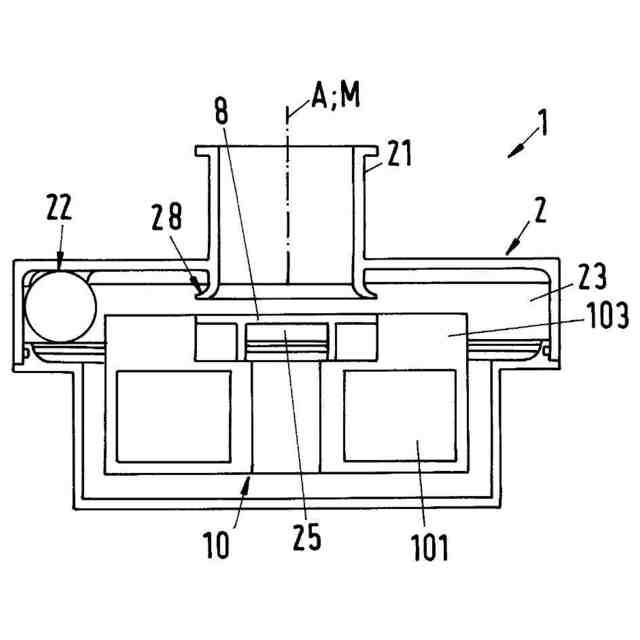
【解決手段】ポンプ・ユニットが、ポンプ・ハウジング並びに流体を搬送するための複数の羽根を有するロータを有し、ポンプ・ハウジングがカバー部及び底部を有し、底部がロータを受けるための円筒形カップを有し、円筒形カップがステータのカップ形状凹部の中に挿入され得る。入口が入口の一方の軸方向端部を形成するリップを有し、動作状態において軸方向を基準としてロータが中央に配置される場合にリップがポンプ・チャンバの中へ突出し、流れ方向で見たとき、ロータの端面の前方で終端する。
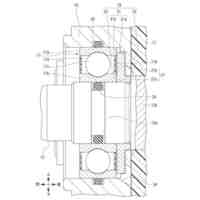
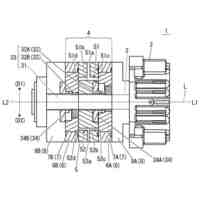
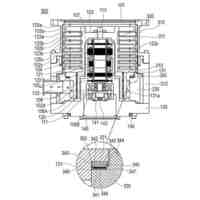
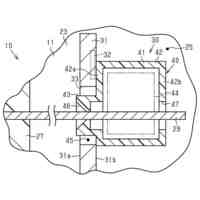
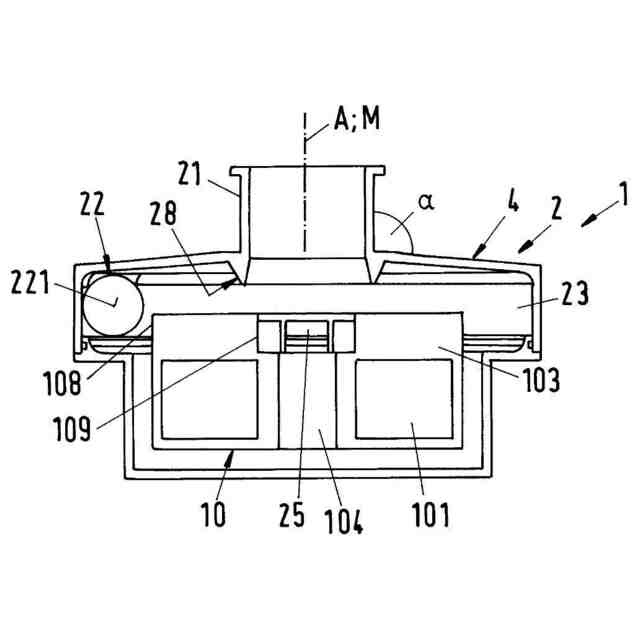
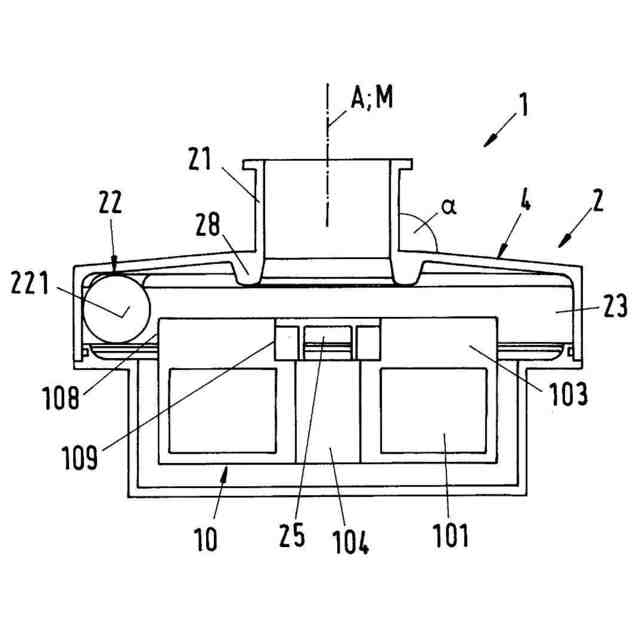
【選択図】図4
特許請求の範囲
【請求項1】
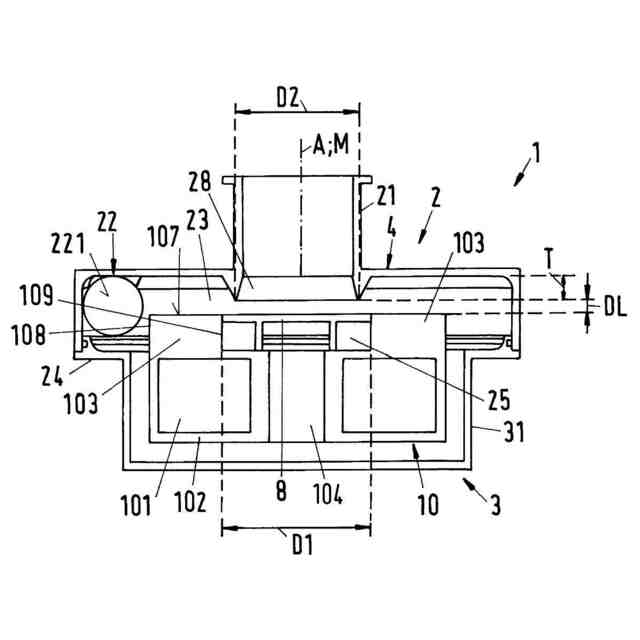
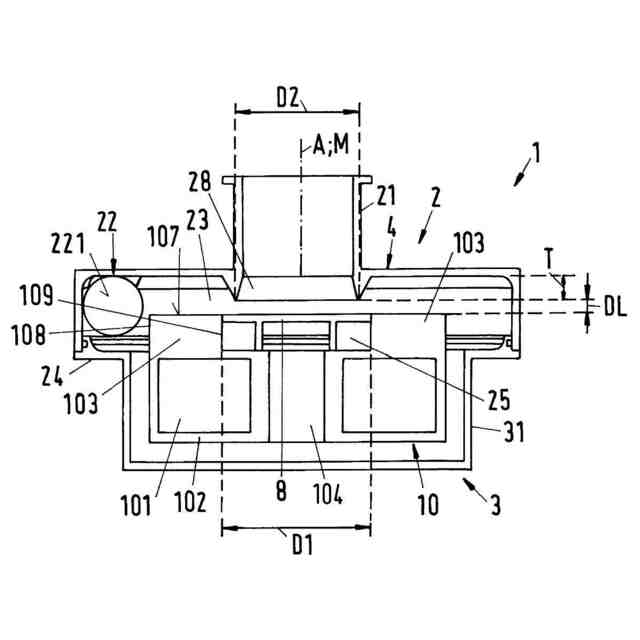
ポンプ・ユニットと、第1の軸方向端部(110)から第2の軸方向端部(120)まで軸方向(A)に延びるステータ(100)と、を備える遠心力ポンプのためのポンプ・ユニットにおいて、カップ形状凹部が前記第1の軸方向端部(110)に設けられ、前記ポンプ・ユニット(1)が前記カップ形状凹部の中に挿入され得、前記ポンプ・ユニット(1)が、搬送されることになる流体のための入口(21)及び出口(22)を有するポンプ・ハウジング(2)並びに前記流体を搬送するための複数の羽根(103)を有する前記ポンプ・ハウジング(2)内に配置されたロータ(10)を有し、各羽根(103)が前記入口の方を向く前記ロータ(10)の端面(107)まで前記軸方向に延び、前記ポンプ・ハウジング(2)がポンプ・チャンバ(23)の境界を画定し、前記ロータ(10)が前記軸方向(A)を中心として回転させられ得、前記ポンプ・ユニット(1)が、前記ロータ(10)の非接触式磁気的浮揚のために及び前記ステータ(100)による前記ロータ(10)の非接触式磁気的駆動のために設計され、前記ポンプ・ハウジング(2)がカバー部(4)及び底部(3)を有し、前記底部(3)が前記ロータ(10)を受けるための円筒形カップ(31)を有し、前記円筒形カップ(31)が前記ステータ(100)の前記カップ形状凹部の中に挿入され得る、ポンプ・ユニットであって、前記入口(21)が前記入口(21)の一方の軸方向端部を形成するリップ(28)を有し、動作状態において前記軸方向(A)を基準として前記ロータ(10)が中央に配置される場合に前記リップ(28)が前記ポンプ・チャンバ(23)の中へ突出し、流れ方向で見たとき、前記ロータ(10)の前記端面(107)の前方で終端する、ことを特徴とする、ポンプ・ユニット。
続きを表示(約 980 文字)
【請求項2】
前記ロータ(10)の前記羽根(103)が、前記ロータ(10)の前記端面(107)まで前記軸方向(A)に延びて直径(D1)を有する中央入口領域(25)の周りに配置される、請求項1に記載のポンプ・ユニット。
【請求項3】
前記ロータ(10)が、前記中央入口領域(25)から前記軸方向(A)に前記ロータ(10)を通って延びる少なくとも1つの緩和開口部(104)を有する、請求項2に記載のポンプ・ユニット。
【請求項4】
前記入口(21)の前記リップ(28)が、前記中央入口領域(25)の前記直径(D1)より大きい外径(D2)を有する、請求項2から3までのいずれか一項に記載のポンプ・ユニット。
【請求項5】
前記リップ(28)が実質的な三角形プロファイルを有し、前記実質的な三角形プロファイルの頂点が前記ロータ(10)の前記端面(107)の方を向く、請求項1から4までのいずれか一項に記載のポンプ・ユニット。
【請求項6】
前記流れ方向で見たとき、前記リップ(28)が広がっていく、請求項1から5までのいずれか一項に記載のポンプ・ユニット。
【請求項7】
前記リップ(28)が外側に湾曲するように設計される、請求項1から6までのいずれか一項に記載のポンプ・ユニット。
【請求項8】
前記リップ(28)が円筒パイプ・セクションとして設計される、請求項1から5までのいずれか一項に記載のポンプ・ユニット。
【請求項9】
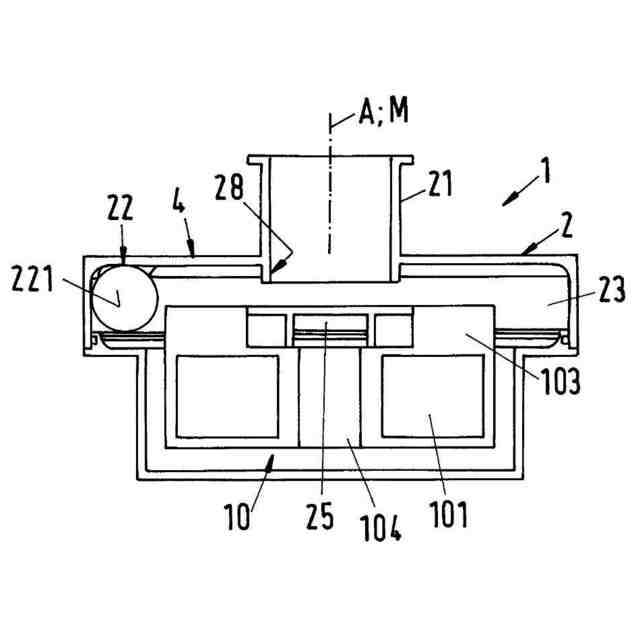
前記ポンプ・ハウジング(2)の前記カバー部(4)が、前記軸方向(A)に対して90°より大きい角度(α)で前記カバー部(4)が前記入口(21)で包囲することになるように、斜めになるように設計される、請求項1から8までのいずれか一項に記載のポンプ・ユニット。
【請求項10】
前記出口(22)が浸入表面(221)を有し、前記流体が前記浸入表面(221)を通って前記ポンプ・チャンバ(23)から前記出口(22)の中へ流れることができ、前記出口(22)の前記浸入表面(221)が円形表面とは異なるプロファイルを有する、請求項1から9までのいずれか一項に記載のポンプ・ユニット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、独立請求項のプリアンブルによる、遠心力ポンプのためのポンプ・ユニットに関する。本発明はさらに、このようなポンプ・ユニットを有する遠心力ポンプに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
ポンプ・ユニットと、ポンプ・ユニットのロータのための駆動ユニットとして設計されたステータと、を備える遠心力ポンプが知られており、ここでは、ポンプ・ユニットのロータが遠心力ポンプの遠心力ホイールを形成する。ロータが接触することなく磁気的に支持され得、ポンプ・ユニット内のステータにより、軸方向を中心として回転するように接触することなく駆動され得る。このような遠心力ポンプは、例えば、Levitronix(登録商標)BPSポンプという商品名で本出願人によって市販されている。
【0003】
ステータ及びロータは電磁回転駆動装置(electromagnetic rotary drive)を形成する。例えば、Levitronix(登録商標)BPSポンプでは、電磁回転駆動装置はベアリングレス・モータの原理に従って設計される。ベアリングレス・モータという用語は、ステータに対してロータが完全に磁気的に支持され得るような電磁回転駆動装置を意味し、ここでは、別個の磁気軸受が提供されない。この目的のため、ステータは、電気駆動装置のステータ及び磁気軸受のステータの両方となる軸受・駆動ステータ(bearing and drive stator)として設計される。一方で軸方向によって画定される所望の回転軸を中心としたその回転を実現するトルクをロータに対して作用させて他方でその径方向位置を能動的に制御又は調節するのを可能にするようにロータに対して任意選択で調整可能である横方向の力を作用させる回転磁界(magnetic rotating field)がステータの電気巻線を用いて生成され得る。したがって、ロータの3自由度が能動的に調節され得、つまりその回転位置及びその径方向位置(2自由度)が能動的に調節され得る。他の3つの自由度に関しては、つまり軸方向におけるその位置及び所望の回転軸に対して垂直な径方向面に対しての傾斜(2自由度)に関しては、ロータは磁気抵抗力によって受動的に磁気的に支持されるか又は安定化され、つまりロータは制御され得ない。ロータの完全な磁気軸受を有する別個の磁気軸受が存在しないことがベアリングレス・モータにその名称を与えることになる特性である。軸受・駆動ステータでは、軸受機能は駆動機能から分離され得ない。
【0004】
もちろん、接触することなくロータが磁気的に支持されるような他の設計の遠心力ポンプも知られており、ここでは例えば、ロータのための別個の磁気軸受が提供され、その結果、磁気軸受機能が駆動機能から分離される。例えば、この目的のために別個のコイルが提供され、この別個のコイルを用いてはロータのための軸受力のみが得られ、この別個のコイルはロータの駆動には寄与しない。例えば、このような遠心力ポンプはWO2022/004144で開示される。
【0005】
例えばベアリングレス・モータの原理に従って設計され動作するロータなどの非接触式で磁気的に支持されて駆動されるロータを有する遠心力ポンプは多数の用途を有することが分かっている。機械軸受が存在しないことで、このような遠心力ポンプは、例えば血液ポンプなどの非常に繊細な物質が搬送される用途において、或いは、例えば、半導体産業、製薬産業、バイオテクノロジー産業、又は、例えば、スラリー、硫酸、リン酸、若しくは半導体産業の他の化学物質のためのポンプなどの機械軸受を非常に早期に使用不可にする摩耗性物質若しくは腐食性の物質の搬送などの、純度に関しての要求が非常に高いような用途において、適する。
【0006】
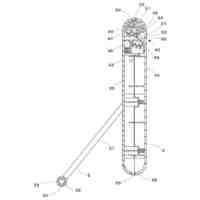
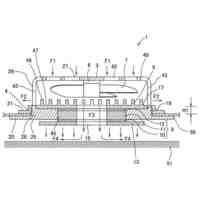
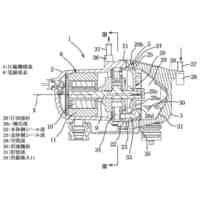
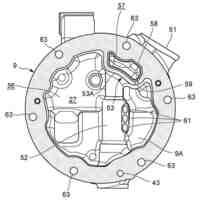
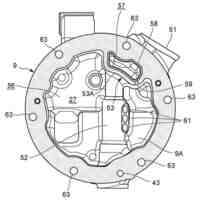
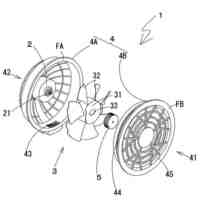
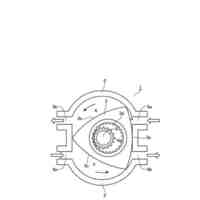
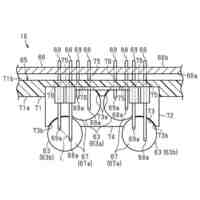
図1は、ベアリングレス・モータの原理に従って設計された現況技術から知られている遠心力ポンプの表示を示す。これは例えば、Levitronix(登録商標)BPSポンプである。より良好に理解することができるように、遠心力ポンプの内部を可視にするために図1では一部分が切り取られている。
【0007】
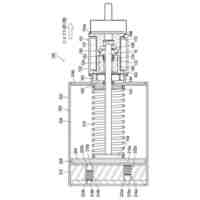
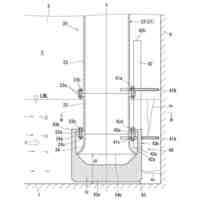
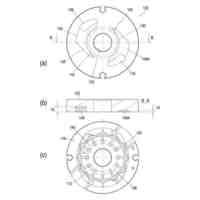
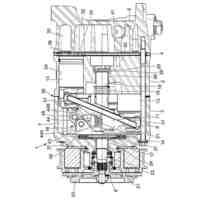
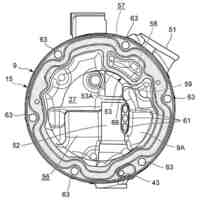
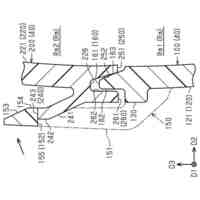
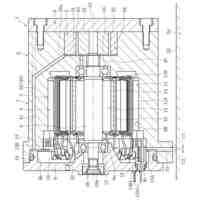
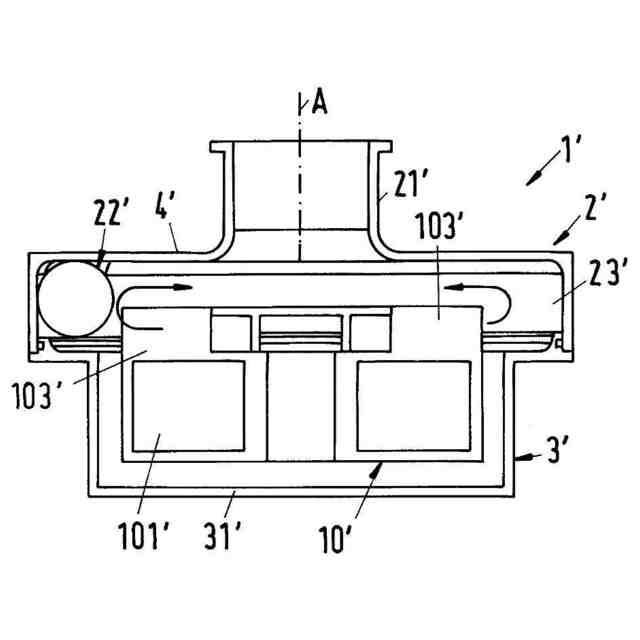
遠心力ポンプ200’は、ステータ100’と、ポンプ・ユニット1’と、を備える。より良好に理解することができるように、図2は軸方向Aからのポンプ・ユニット1’の上面図を示し、図3は図2の線III-IIIに沿う断面図でポンプ・ユニット1’を示す。
【0008】
図1、図2及び図3の表示が現況技術からのデバイスであることを示すために、各参照符号はここでは逆コンマ又はダッシュを付される。遠心力ポンプはその全体を参照符号200’によって示される。
【0009】
遠心力ホイール又はインペラを形成するロータ10’がポンプ・ユニット1’内に配置され、このホイール又はインペラを用いて流体が搬送される。ステータ100’がステータ・ハウジング130’を有し、第1の軸方向端部110’から第2の軸方向端部120’まで軸方向Aに延び、ここでは、カップ形状凹部121’が第1の軸方向端部110’に設けられ、ポンプ・ユニット1’がカップ形状凹部121’の中に挿入され得る。ステータ100’は、ロータ10’と共に、軸方向Aを中心としてロータ10’を回転させるための電磁回転駆動装置を形成する。ステータ100’は、ベアリングレス・モータの原理に従ってロータ10’の非接触式磁気的軸受のために設計される。この目的のため、ステータ100’は軸受・駆動ステータとして設計され、ステータ100’により、ロータ10’は軸方向Aを中心して回転するために接触することなく磁気的に駆動され得、さらには接触することなくステータ100’に対して磁気的に支持され得、ここでは、ロータ10’は軸方向Aにおいて受動的に磁気的に安定化され、さらには軸方向Aに対して垂直である径方向面において能動的に磁気的に支持され、径方向面は図1では線Eによって示される。
【0010】
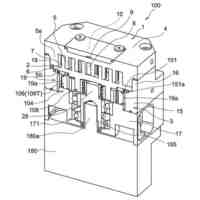
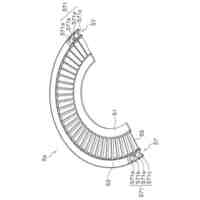
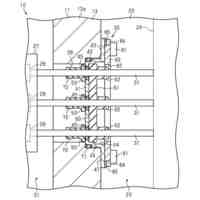
ステータ100’及びロータ10’を有する電磁回転駆動装置はいわゆるテンプル・モータ(temple motor)として設計される。ステータ100’はここでは8つのコイル・コア125’である複数のコイル・コア125’を備え、複数のコイル・コア125’の各々は、図1の表示によると下側端部である第1の端部から第2の端部まで軸方向Aに延びる長手方向脚部126’と、径方向面E内において長手方向脚部126’の第2の端部に配置された横方向脚部127’と、を備える。各横方向脚部127’は付随の長手方向脚部126’からロータ10’の方に向かって径方向に延び、径方向内側に位置する端面によって境界を画定される。コイル・コア126’は円周方向においてカップ形状凹部121’の周りに及びひいてはロータ10’の周りに配置され、その結果、ロータ10’がコイル・コア126’の横方向脚部127’の径方向内側に位置する端面の間に配置されることになる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
海流製造装置。
2か月前
株式会社スギノマシン
圧縮機
1か月前
株式会社ツインバード
送風装置
2か月前
株式会社ツインバード
送風装置
2か月前
日機装株式会社
遠心ポンプ
1か月前
カヤバ株式会社
電動ポンプ
3か月前
カヤバ株式会社
電動ポンプ
14日前
ビッグボーン株式会社
送風装置
2か月前
株式会社不二越
蓄圧装置
3か月前
株式会社ノーリツ
ロータリ圧縮機
2か月前
株式会社酉島製作所
ポンプ
4か月前
小倉クラッチ株式会社
ルーツブロア
3か月前
株式会社不二越
ベーンポンプ
3か月前
株式会社ノーリツ
ロータリー圧縮機
4か月前
サンデン株式会社
可変容量型圧縮機
22日前
樫山工業株式会社
真空ポンプ
1か月前
サンデン株式会社
スクロール圧縮機
1か月前
サンデン株式会社
スクロール圧縮機
1か月前
サンデン株式会社
スクロール圧縮機
1か月前
株式会社坂製作所
スクロール圧縮機
4か月前
株式会社アイシン
ポンプケース
1か月前
株式会社島津製作所
真空ポンプ
2か月前
株式会社クボタ
作業機
15日前
株式会社豊田自動織機
流体機械
2か月前
エドワーズ株式会社
真空ポンプ
1か月前
株式会社チロル
送風機、送風機付衣服
2か月前
株式会社島津製作所
真空ポンプ
2か月前
株式会社豊田自動織機
電動圧縮機
2か月前
株式会社豊田自動織機
電動圧縮機
3か月前
株式会社ナノバブル研究所
気液駆動装置
1か月前
NTN株式会社
電動オイルポンプ
1か月前
已久工業股ふん有限公司
空気圧縮機構造
3か月前
株式会社豊田自動織機
電動圧縮機
3か月前
株式会社豊田自動織機
電動圧縮機
3か月前
株式会社豊田自動織機
電動圧縮機
2か月前
株式会社豊田自動織機
電動圧縮機
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ