TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025168673
公報種別
公開特許公報(A)
公開日
2025-11-11
出願番号
2025075478
出願日
2025-04-30
発明の名称
車両走行中のアクティブセーフティ制御方法及び装置、コンピュータ読取可能記憶媒体、並びに電子機器
出願人
深せん地平線机器人科技有限公司
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
G08G
1/16 20060101AFI20251104BHJP(信号)
要約
【課題】車両走行中のアクティブセーフティ制御方法及び装置、コンピュータ読取可能記憶媒体、並びに電子機器。
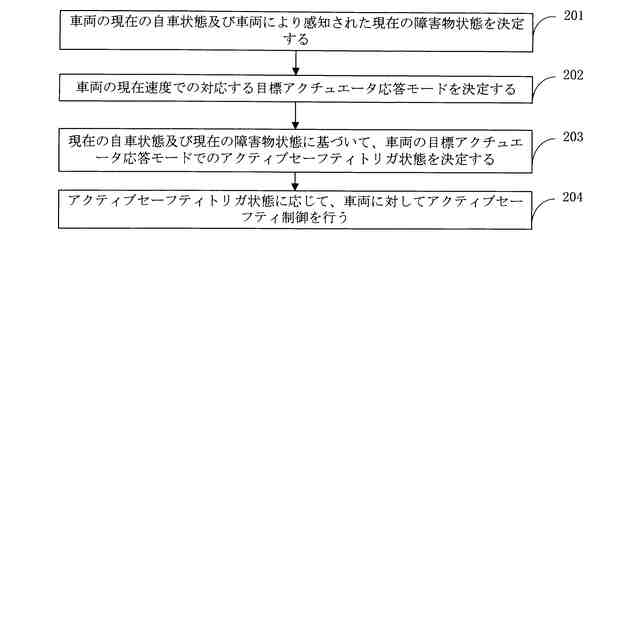
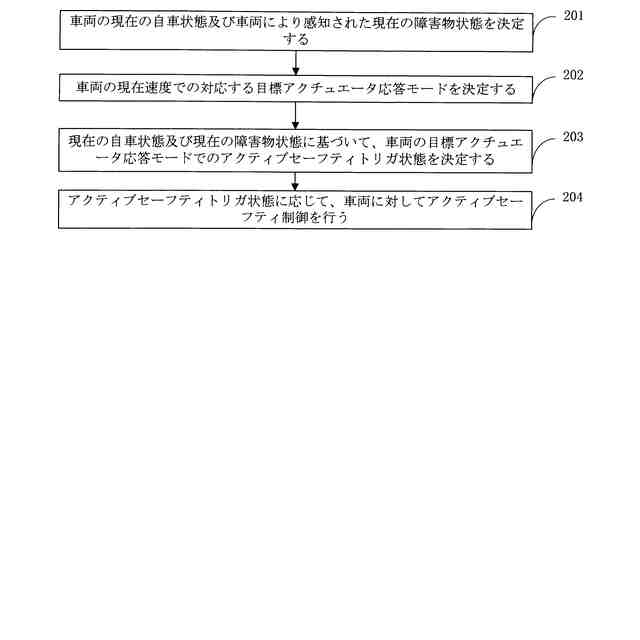
【解決手段】両走行中のアクティブセーフティ制御方法は、車両の現在の自車状態及び車両により感知された現在の障害物状態を決定するステップと、車両の現在速度での対応する目標アクチュエータ応答モードを決定するステップと、現在の自車状態及び現在の障害物状態に基づいて、車両の目標アクチュエータ応答モードでのアクティブセーフティトリガ状態を決定するステップと、アクティブセーフティトリガ状態に応じて、車両に対してアクティブセーフティ制御を行うステップと、を含む。
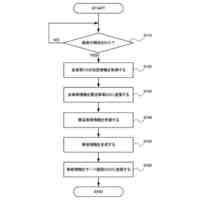
【選択図】図2
特許請求の範囲
【請求項1】
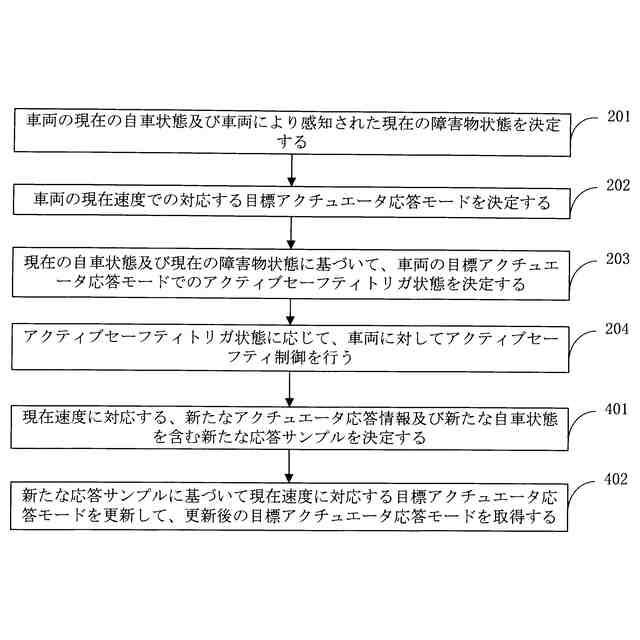
車両の現在の自車状態及び前記車両により感知された現在の障害物状態を決定するステップと、
前記車両の現在速度での対応する目標アクチュエータ応答モードを決定するステップと、
前記現在の自車状態及び前記現在の障害物状態に基づいて、前記車両の前記目標アクチュエータ応答モードでのアクティブセーフティトリガ状態を決定するステップと、
前記アクティブセーフティトリガ状態に応じて、前記車両に対してアクティブセーフティ制御を行うステップと、を含む、
車両走行中のアクティブセーフティ制御装置により実行される車両走行中のアクティブセーフティ制御方法。
続きを表示(約 3,200 文字)
【請求項2】
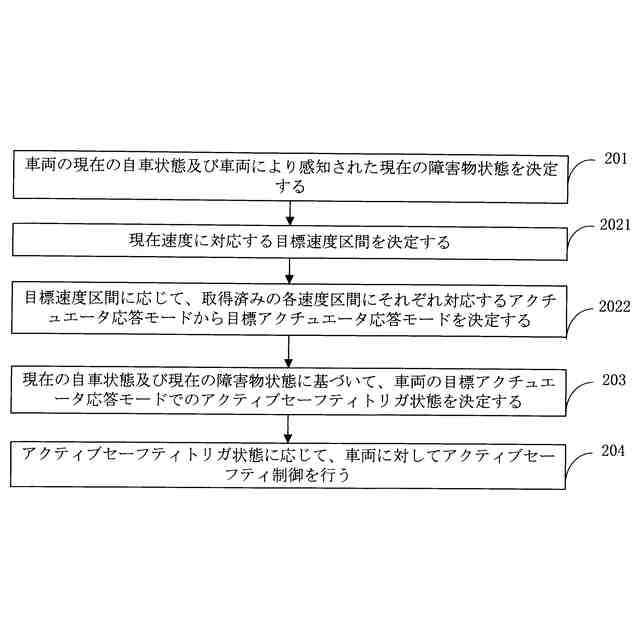
前記車両の現在速度での対応する前記目標アクチュエータ応答モードを決定するステップは、
前記現在速度に対応する目標速度区間を決定するステップと、
前記目標速度区間に応じて、異なる速度区間にそれぞれ対応するアクチュエータ応答モードから前記目標アクチュエータ応答モードを決定するステップと、を含む、
請求項1に記載の車両走行中のアクティブセーフティ制御方法。
【請求項3】
前記目標アクチュエータ応答モードは、
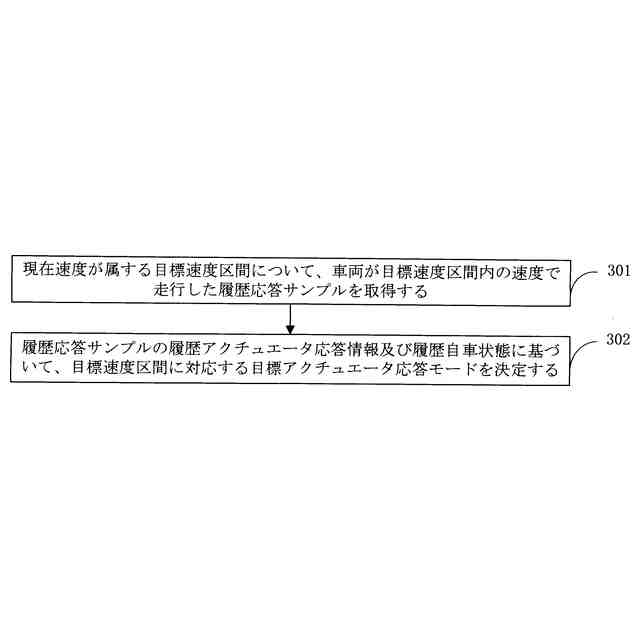
前記現在速度が属する目標速度区間について、前記車両が前記目標速度区間内の速度で走行した、履歴アクチュエータ応答情報及び履歴自車状態を含む履歴応答サンプルを取得するステップと、
前記履歴応答サンプルの前記履歴アクチュエータ応答情報及び前記履歴自車状態に基づいて、前記目標速度区間に対応する前記目標アクチュエータ応答モードを決定するステップとにより取得される、
請求項1に記載の車両走行中のアクティブセーフティ制御方法。
【請求項4】
前記履歴応答サンプルの前記履歴アクチュエータ応答情報及び前記履歴自車状態に基づいて、前記目標速度区間に対応する前記目標アクチュエータ応答モードを決定するステップは、
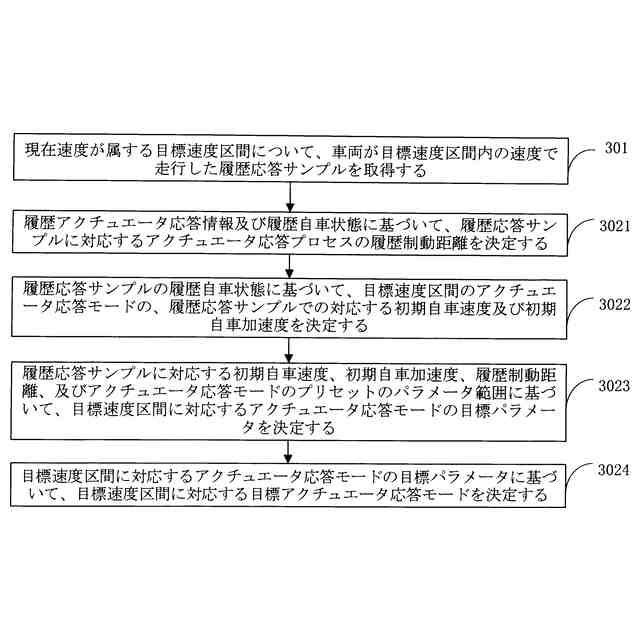
前記履歴アクチュエータ応答情報及び前記履歴自車状態に基づいて、前記履歴応答サンプルに対応するアクチュエータ応答プロセスの履歴制動距離を決定するステップと、
前記履歴応答サンプルの前記履歴自車状態に基づいて、前記目標速度区間のアクチュエータ応答モードの、前記履歴応答サンプルでの対応する初期自車速度及び初期自車加速度を決定するステップと、
前記履歴応答サンプルに対応する前記初期自車速度、前記初期自車加速度、前記履歴制動距離、及びアクチュエータ応答モードのプリセットのパラメータ範囲に基づいて、前記目標速度区間に対応するアクチュエータ応答モードの目標パラメータを決定するステップと、
前記目標速度区間に対応するアクチュエータ応答モードの目標パラメータに基づいて、前記目標速度区間に対応する前記目標アクチュエータ応答モードを決定するステップと、を含む、
請求項3に記載の車両走行中のアクティブセーフティ制御方法。
【請求項5】
前記履歴応答サンプルに対応する前記初期自車速度、前記初期自車加速度、前記履歴制動距離、及びアクチュエータ応答モードのプリセットのパラメータ範囲に基づいて、前記目標速度区間に対応するアクチュエータ応答モードの目標パラメータを決定するステップは、
前記履歴応答サンプルに対応する前記初期自車速度、前記初期自車加速度及び前記履歴制動距離に基づいて、最小二乗法によりプリセットのパラメータ範囲内で検索して、前記目標速度区間に対応するアクチュエータ応答モードの目標パラメータを決定するステップを含む、
請求項4に記載の車両走行中のアクティブセーフティ制御方法。
【請求項6】
前記履歴応答サンプルに対応する前記初期自車速度、前記初期自車加速度及び前記履歴制動距離に基づいて、最小二乗法によりプリセットのパラメータ範囲内で検索して、前記目標速度区間に対応するアクチュエータ応答モードの目標パラメータを決定するステップは、
現在検索されたパラメータについて、前記履歴応答サンプルに対応する前記初期自車速度及び前記初期自車加速度に基づいて、前記現在検索されたパラメータでの前記履歴応答サンプルに対応するフィッティング制動距離を決定するステップと、
前記履歴応答サンプルに対応する前記履歴制動距離、前記フィッティング制動距離、及び前記現在検索されたパラメータに基づいて、前記目標速度区間に対応するアクチュエータ応答モードの前記目標パラメータを決定するステップと、を含む、
請求項5に記載の車両走行中のアクティブセーフティ制御方法。
【請求項7】
前記履歴応答サンプルに対応する前記初期自車速度及び前記初期自車加速度に基づいて、前記現在検索されたパラメータでの前記履歴応答サンプルに対応する前記フィッティング制動距離を決定するステップは、
前記現在検索されたパラメータに基づいて、アクチュエータ応答プロセスの遅延段階における現在の遅延時間、前記アクチュエータ応答プロセスの圧力上昇段階における現在の圧力上昇速度、及び前記アクチュエータ応答プロセスの圧力保持段階における現在の平均減速度を決定するステップと、
前記履歴応答サンプルに対応する前記初期自車速度、前記初期自車加速度、前記現在の遅延時間、前記現在の圧力上昇速度及び前記現在の平均減速度に基づいて、前記履歴応答サンプルの前記遅延段階における第1制動距離、前記履歴応答サンプルの前記圧力上昇段階における第2制動距離、及び前記履歴応答サンプルの前記圧力保持段階における第3制動距離を決定するステップと、
前記第1制動距離、前記第2制動距離及び前記第3制動距離に基づいて、前記現在検索されたパラメータでの前記履歴応答サンプルに対応する前記フィッティング制動距離を決定するステップと、を含む、
請求項6に記載の車両走行中のアクティブセーフティ制御方法。
【請求項8】
前記アクティブセーフティトリガ状態に応じて、前記車両に対してアクティブセーフティ制御を行うステップの後、さらに、
前記現在速度に対応する、新たなアクチュエータ応答情報及び新たな自車状態を含む新たな応答サンプルを決定するステップと、
前記新たな応答サンプルに基づいて、前記現在速度に対応する前記目標アクチュエータ応答モードを更新して、更新後の目標アクチュエータ応答モードを取得するステップと、を含む、
請求項1~7のいずれか1項に記載の車両走行中のアクティブセーフティ制御方法。
【請求項9】
前記現在の自車状態及び前記現在の障害物状態に基づいて、前記車両の前記目標アクチュエータ応答モードでの前記アクティブセーフティトリガ状態を決定するステップは、
前記現在の自車状態及び前記現在の障害物状態に基づいて、アクチュエータ応答プロセスにおける各段階にそれぞれ対応する自車の予測状態及び障害物の予測状態を決定するステップと、
各前記段階にそれぞれ対応する前記自車の予測状態及び前記障害物の予測状態に基づいて、前記車両及び前記障害物の移動状態を決定するステップと、
前記車両及び前記障害物の移動状態に基づいて、前記アクチュエータ応答プロセスにおける前記車両と前記障害物との最小距離を決定するステップと、
前記最小距離及び安全距離閾値に基づいて、前記アクティブセーフティトリガ状態を決定するステップと、を含む、
請求項1~7のいずれか1項に記載の車両走行中のアクティブセーフティ制御方法。
【請求項10】
車両の現在の自車状態及び前記車両により感知された現在の障害物状態を決定するための第1処理モジュールと、
前記車両の現在速度での対応する目標アクチュエータ応答モードを決定するための第2処理モジュールと、
前記現在の自車状態及び前記現在の障害物状態に基づいて、前記車両の前記目標アクチュエータ応答モードでのアクティブセーフティトリガ状態を決定するための第3処理モジュールと、
前記アクティブセーフティトリガ状態に応じて、前記車両に対してアクティブセーフティ制御を行うための制御モジュールと、を含む、
車両走行中のアクティブセーフティ制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両運転の技術分野に関し、特に車両走行中のアクティブセーフティ制御方法及び装置、コンピュータ読取可能記憶媒体、並びに電子機器に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
車両走行中に、運転者がブレーキをかけるのが遅すぎたり、制動力が小さすぎたり、ブレーキをかける措置を取ることが全くできない場合、車両のアクティブセーフティ制御システム(例えば、自動緊急ブレーキシステム)は、アクティブブレーキ措置を取る必要があり、これにより、運転者を支援して衝突を回避し、又は衝突の発生を減らして、車両のアクティブセーフティ制御を実現する。アクティブセーフティ制御システムのアクティブセーフティ機能のトリガについて、適切なトリガタイミングの選択により、アクティブセーフティ機能のロバスト性を向上させることができる。アクティブセーフティ機能がアクティブセーフティ制御システムにより過度に早めにトリガされると、運転者に不必要なパニック及び不信感等の感情をもたらしやすい。アクティブセーフティ機能がアクティブセーフティ制御システムにより過度に遅くトリガされると、ブレーキをかけて安全に停止することができず、衝突が発生して、運転者に一定の傷害を被らせる可能性がある。関連技術において、通常、衝突余裕時間(Time-To-Collision、TTCと略称)モデルにより、アクティブセーフティ機能をトリガするか否かを決定する。衝突余裕時間モデルは、人為的に設定した安全時間閾値に過度に依存するため、設定結果が良くないと、アクティブセーフティ機能のトリガタイミングが不適切になりやすく、それにより、前述のような不利な結果が発生しやすい。
【発明の概要】
【発明が解決しようとする課題】
【0003】
上記の技術的問題を解決するために、本開示の実施形態は、アクティブセーフティ機能をトリガする適時性及び有効性を向上させ、ユーザ体験を向上させるための、車両走行中のアクティブセーフティ制御方法及び装置、コンピュータ読取可能記憶媒体、並びに電子機器を提供する。
【課題を解決するための手段】
【0004】
本開示の第1態様に係る車両走行中のアクティブセーフティ制御方法は、車両の現在の自車状態及び前記車両により感知された現在の障害物状態を決定するステップと、前記車両の現在速度での対応する目標アクチュエータ応答モードを決定するステップと、前記現在の自車状態及び前記現在の障害物状態に基づいて、前記車両の前記目標アクチュエータ応答モードでのアクティブセーフティトリガ状態を決定するステップと、前記アクティブセーフティトリガ状態に応じて、前記車両に対してアクティブセーフティ制御を行うステップと、を含む。
【0005】
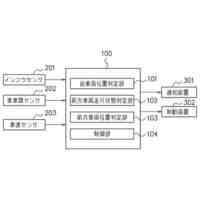
本開示の第2態様に係る車両走行中のアクティブセーフティ制御装置は、車両の現在の自車状態及び前記車両により感知された現在の障害物状態を決定するための第1処理モジュールと、前記車両の現在速度での対応する目標アクチュエータ応答モードを決定するための第2処理モジュールと、前記現在の自車状態及び前記現在の障害物状態に基づいて、前記車両の前記目標アクチュエータ応答モードでのアクティブセーフティトリガ状態を決定するための第3処理モジュールと、前記アクティブセーフティトリガ状態に応じて、前記車両に対してアクティブセーフティ制御を行うための制御モジュールと、を含む。
【0006】
本開示の第3態様に係るコンピュータ読取可能記憶媒体には、本開示の上記のいずれかの実施形態に記載の車両走行中のアクティブセーフティ制御方法を実行するためのコンピュータプログラムが記憶されている。
【0007】
本開示の第4態様に係る電子機器は、プロセッサと、前記プロセッサが実行可能な命令を記憶するためのメモリと、を含み、前記プロセッサは、前記メモリから前記実行可能な命令を読み取って実行して、本開示の上記のいずれかの実施形態に記載の車両走行中のアクティブセーフティ制御方法を実施するために用いられる。
【0008】
本開示の第5態様は、コンピュータプログラム製品を提供し、前記コンピュータプログラム製品における命令がプロセッサにより実行されると、本開示の上記のいずれかの実施形態にて提供される車両走行中のアクティブセーフティ制御方法が実行される。
【0009】
本開示の上記のいずれかの実施形態にて提供される車両走行中のアクティブセーフティ制御方法及び装置、コンピュータ読取可能記憶媒体及び、並びに電子機器によれば、車両の現在速度での目標アクチュエータ応答モード、現在の自車状態及び現在の障害物状態に基づいて、車両の現在の多方面を統合して、アクティブセーフティトリガ状態を決定することで、車両が最適なタイミングでアクティブセーフティ機能をトリガすることができることを確保し、それにより、アクティブセーフティ機能が過度に早めにトリガされることにより運転者や同乗者がストレスを感じることを回避又は減少するとこができるだけでなく、アクティブセーフティ機能が過度に遅くトリガされることによる衝突事故により運転者や同乗者が被る傷害を回避又は減少することもでき、車両運転の安全性を向上させる。
【図面の簡単な説明】
【0010】
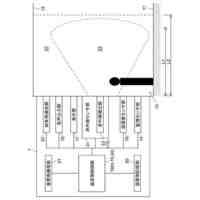
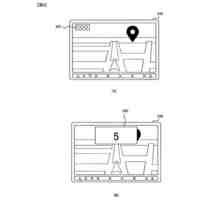
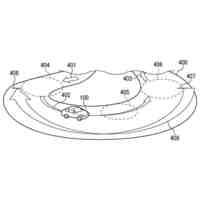
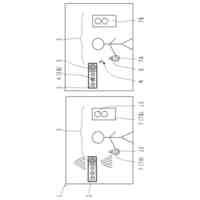
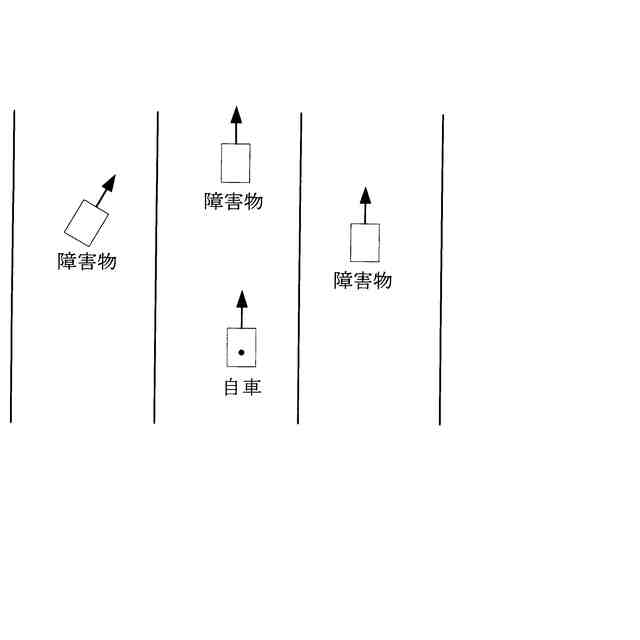
本開示にて提供される車両走行中のアクティブセーフティ制御方法の一例示的な適用シーンである。
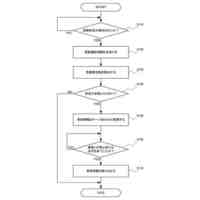
本開示の一例示的な実施形態にて提供される車両走行中のアクティブセーフティ制御方法の模式的なフローチャートである。
本開示の別の例示的な実施形態にて提供される車両走行中のアクティブセーフティ制御方法の模式的なフローチャートである。
本開示の一例示的な実施形態にて提供される目標アクチュエータ応答モードを取得する模式的なフローチャートである。
本開示の別の例示的な実施形態にて提供される目標アクチュエータ応答モードを取得する模式的なフローチャートである。
本開示の又の例示的な実施形態にて提供される車両走行中のアクティブセーフティ制御方法の模式的なフローチャートである。
本開示のさらなる例示的な実施形態にて提供される車両走行中のアクティブセーフティ制御方法の模式的なフローチャートである。
本開示の一例示的な実施形態にて提供されるアクチュエータ応答モードの模式図である。
本開示の一例示的な実施形態にて提供される車両走行中のアクティブセーフティ制御方法のフローチャートである。
本開示の一例示的な実施形態にて提供される応答サンプルを記録するフローのフローチャートである。
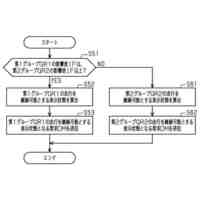
本開示の一例示的な実施形態にて提供されるアクチュエータ応答モードのフィッティングのフローのフローチャートである。
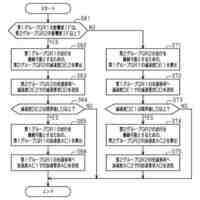
本開示の一例示的な実施形態にて提供されるアクティブセーフティトリガ状態を決定するフローチャートである。
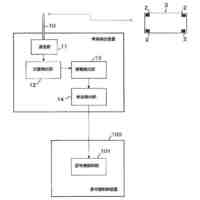
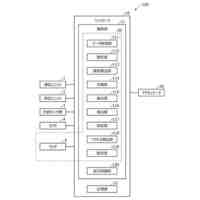
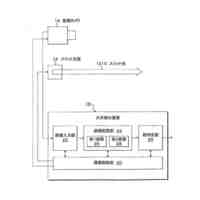
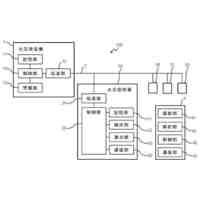
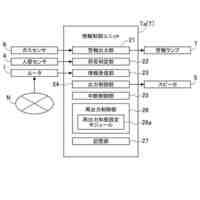
本開示の一例示的な実施形態にて提供される車両走行中のアクティブセーフティ制御装置の構造模式図である。
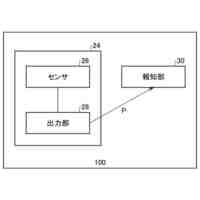
本開示の別の例示的な実施形態にて提供される車両走行中のアクティブセーフティ制御装置の構造模式図である。
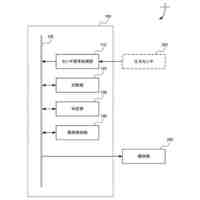
本開示の実施形態にて提供される電子機器の構造図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
安全支援装置
6日前
日本精機株式会社
警報システム
2か月前
株式会社SUBARU
車両
1か月前
個人
自動電動車椅子
1か月前
スズキ株式会社
運転支援装置
2か月前
エムケー精工株式会社
車両誘導装置
2か月前
日本無線株式会社
船舶システム
7日前
個人
磁気路上での車両の路線離脱防御
1か月前
ニッタン株式会社
検知器
2か月前
株式会社国際電気
防災システム
2か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
大阪瓦斯株式会社
音声出力システム
1か月前
ダイハツ工業株式会社
移動支援装置
25日前
株式会社SUBARU
運転支援装置
1か月前
日本信号株式会社
異常走行検出装置
1か月前
トヨタ自動車株式会社
サーバ
15日前
トヨタ自動車株式会社
サーバ
1か月前
株式会社小糸製作所
移動体検出装置
2か月前
株式会社小糸製作所
車両検出システム
2か月前
日本精機株式会社
報知装置及び報知システム
1か月前
株式会社デンソー
運航管理装置
1か月前
株式会社CCT
通信装置及び表示方法
1か月前
三菱自動車工業株式会社
制御システム
1か月前
能美防災株式会社
火災感知器
2か月前
株式会社 ミックウェア
車内環境制御システム
28日前
株式会社SUBARU
事故情報収集装置
1か月前
本田技研工業株式会社
物体検出装置
2か月前
ホーチキ株式会社
火災検出システム
1か月前
能美防災株式会社
非常伝達装置
2か月前
ヨシモトポール株式会社
接近報知システム
2か月前
株式会社SUBARU
車室内異常検知装置
1か月前
能美防災株式会社
火災感知器及び火災報知システム
1か月前
大阪瓦斯株式会社
音声出力装置
1か月前
株式会社関電工
車両運行通知システム
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ