TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165182
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024069135
出願日
2024-04-22
発明の名称
工作機械、測定方法、および測定プログラム
出願人
DMG森精機株式会社
,
株式会社空間精度研究所
代理人
個人
主分類
B23Q
15/26 20060101AFI20251027BHJP(工作機械;他に分類されない金属加工)
要約
【課題】より広い旋回角度の範囲でテーブルの運動を正確に捉える技術を提供する。
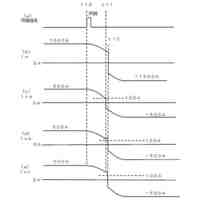
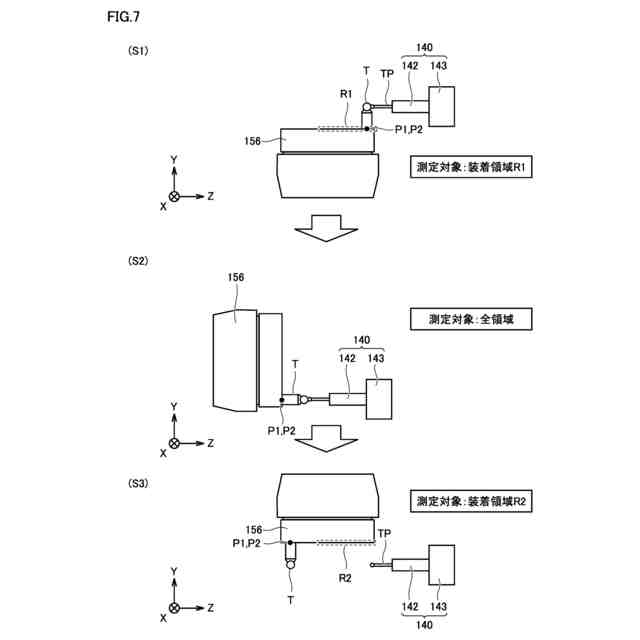
【解決手段】工作機械は、旋回軸を中心としてテーブルを旋回駆動するテーブル駆動部と、タッチプローブを装着可能な主軸と、テーブルに対して主軸を相対的に送り駆動する主軸駆動部と、制御部とを備える。制御部は、予め定められた角度範囲でテーブルを旋回駆動する駆動処理と、テーブルが第1旋回角度に駆動された際に、第1,第2基準位置において基準物体の位置を測定する第1測定処理と、テーブルが第2旋回角度に駆動された際に、第1~第3基準位置において基準物体の位置を測定する第2測定処理と、テーブルが第3旋回角度に駆動された際に、第2,第3基準位置において基準物体の位置を測定する第3測定処理と、第1~第3測定処理で測定された各位置を出力する出力処理とを実行する。第2旋回角度は、第1,第3旋回角度の間の角度である。
【選択図】図7
特許請求の範囲
【請求項1】
ワークを載置可能なテーブルの旋回軸の誤差補正処理に用いられる実測値を測定することが可能な工作機械であって、
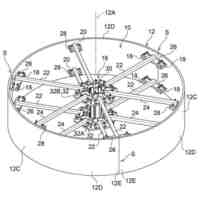
前記テーブルは、基準物体を装着可能に構成されており、
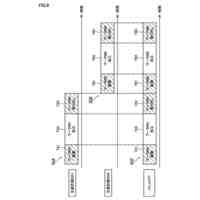
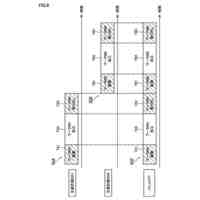
前記テーブル上における前記基準物体の装着位置は、
前記テーブル上の第1領域に属し、かつ前記テーブル上の第2領域に属さない1つ以上の第1基準位置と、
前記第1領域と前記第2領域との重複領域に属する1つ以上の第2基準位置と、
前記第2領域に属し、かつ前記第1領域に属さない1つ以上の第3基準位置とを含み、
前記旋回軸を中心として前記テーブルを旋回駆動するためのテーブル駆動部と、
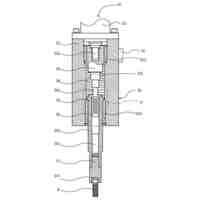
タッチプローブを装着可能な主軸と、
前記テーブルに対して前記主軸を相対的に送り駆動するための主軸駆動部と、
前記工作機械を制御するための制御部とを備え、
前記制御部は、
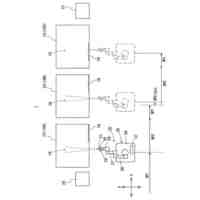
前記旋回軸を中心として予め定められた角度範囲で前記テーブルを旋回駆動する駆動処理と、
前記テーブルが前記予め定められた角度範囲内の第1旋回角度に駆動された際に、前記第1基準位置と前記第2基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第1測定処理と、
前記テーブルが前記予め定められた角度範囲内の第2旋回角度に駆動された際に、前記第1基準位置と前記第2基準位置と前記第3基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第2測定処理と、
前記テーブルが前記予め定められた角度範囲内の第3旋回角度に駆動された際に、前記第2基準位置と前記第3基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第3測定処理と、
前記第1~第3測定処理で測定された各位置を前記実測値として出力する出力処理とを実行し、
前記第2旋回角度は、前記第1旋回角度と、前記第3旋回角度との間の角度である、工作機械。
続きを表示(約 2,200 文字)
【請求項2】
前記制御部は、前記実測値に基づいて、前記誤差補正処理をさらに実行し、
前記誤差補正処理では、前記旋回軸に係る旋回中心と、前記旋回軸に係る幾何誤差とが算出される、請求項1に記載の工作機械。
【請求項3】
前記第1基準位置の数は、2つ以上であり、
前記第3基準位置の数は、2つ以上である、請求項1または2に記載の工作機械。
【請求項4】
前記第2基準位置の数は、2つ以上である、請求項1または2に記載の工作機械。
【請求項5】
前記主軸の軸方向における前記タッチプローブから前記第1基準位置までの距離を第1距離とし、前記主軸の軸方向における前記タッチプローブから前記第2基準位置までの距離を第2距離とし、前記主軸の軸方向における前記タッチプローブから前記第3基準位置までの距離を第3距離とした場合、
前記テーブルが前記第1旋回角度にある際には、前記第1距離は、前記第2距離よりも短く、かつ、前記第2距離は、前記第3距離よりも短く、
前記テーブルが前記第3旋回角度にある際には、前記第3距離は、前記第2距離よりも短く、かつ、前記第2距離は、前記第1距離よりも短い、請求項1または2に記載の工作機械。
【請求項6】
ワークを載置可能なテーブルの旋回軸の誤差補正処理に用いられる実測値を工作機械で測定するための測定方法であって、
前記テーブルは、複数の基準物体を装着可能に構成されており、
前記テーブル上における前記基準物体の装着位置は、
前記テーブル上の第1領域に属し、かつ前記テーブル上の第2領域に属さない1つ以上の第1基準位置と、
前記第1領域と前記第2領域との重複領域に属する1つ以上の第2基準位置と、
前記第2領域に属し、かつ前記第1領域に属さない1つ以上の第3基準位置とを含み、
前記工作機械は、
前記旋回軸を中心として前記テーブルを旋回駆動するためのテーブル駆動部と、
タッチプローブを装着可能な主軸と、
前記テーブルに対して前記主軸を相対的に送り駆動するための主軸駆動部とを備え、
前記測定方法は、
前記旋回軸を中心として予め定められた角度範囲で前記テーブルを旋回駆動する駆動ステップと、
前記テーブルが前記予め定められた角度範囲内の第1旋回角度に駆動された際に、前記第1基準位置と前記第2基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第1測定ステップと、
前記テーブルが前記予め定められた角度範囲内の第2旋回角度に駆動された際に、前記第1基準位置と前記第2基準位置と前記第3基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第2測定ステップと、
前記テーブルが前記予め定められた角度範囲内の第3旋回角度に駆動された際に、前記第2基準位置と前記第3基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第3測定ステップと、
前記第1~第3測定ステップで測定された各位置を前記実測値として出力する出力ステップとを備え、
前記第2旋回角度は、前記第1旋回角度と、前記第3旋回角度との間の角度である、測定方法。
【請求項7】
ワークを載置可能なテーブルの旋回軸の誤差補正処理に用いられる実測値を工作機械で測定するための測定プログラムであって、
前記テーブルは、複数の基準物体を装着可能に構成されており、
前記テーブル上における前記基準物体の装着位置は、
前記テーブル上の第1領域に属し、かつ前記テーブル上の第2領域に属さない1つ以上の第1基準位置と、
前記第1領域と前記第2領域との重複領域に属する1つ以上の第2基準位置と、
前記第2領域に属し、かつ前記第1領域に属さない1つ以上の第3基準位置とを含み、
前記工作機械は、
前記旋回軸を中心として前記テーブルを旋回駆動するためのテーブル駆動部と、
タッチプローブを装着可能な主軸と、
前記テーブルに対して前記主軸を相対的に送り駆動するための主軸駆動部とを備え、
前記測定プログラムは、コンピュータに、
前記旋回軸を中心として予め定められた角度範囲で前記テーブルを旋回駆動する駆動処理と、
前記テーブルが前記予め定められた角度範囲内の第1旋回角度に駆動された際に、前記第1基準位置と前記第2基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第1測定処理と、
前記テーブルが前記予め定められた角度範囲内の第2旋回角度に駆動された際に、前記第1基準位置と前記第2基準位置と前記第3基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第2測定処理と、
前記テーブルが前記予め定められた角度範囲内の第3旋回角度に駆動された際に、前記第2基準位置と前記第3基準位置とにおいて前記基準物体の位置を前記タッチプローブで測定する第3測定処理と、
前記第1~第3測定処理で測定された各位置を前記実測値として出力する出力処理とを備え、
前記第2旋回角度は、前記第1旋回角度と、前記第3旋回角度との間の角度である、測定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、工作機械、測定方法、および測定プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特開2016-155185号公報(特許文献1)は、「並進軸に対してテーブル側と主軸頭側に回転軸を夫々1軸ずつ有するタイプの5軸制御工作機械の幾何誤差の内、回転軸の中心位置誤差全て、回転軸の傾き誤差、直進軸の直角度を(同時に)同定することが可能な誤差同定方法」を開示している(要約参照)。
【0003】
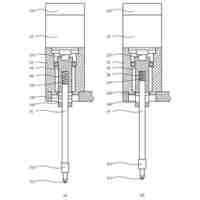
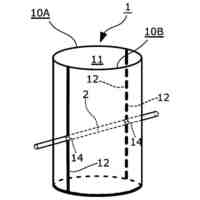
特許文献1に開示される工作機械は、主軸頭に装着されたタッチプローブで、テーブルに固定されたターゲット球(基準物体)の位置を測定する。このとき、当該工作機械は、テーブルを旋回させながら1つの基準物体の位置を測定する。そして、当該工作機械は、測定値と指令値との差異に基づいて幾何誤差を同定している。
【先行技術文献】
【特許文献】
【0004】
特開2016-155185号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
テーブルの旋回軸に係る幾何誤差をより正確に同定するためには、複数の基準物体をテーブルに配置することが好ましい。このとき、テーブル上における基準物体の間隔が長いと、テーブルの運動をより正確に捉えることができ、幾何誤差の測定精度が向上する。しかしながら、この場合には、テーブルの旋回角度によっては主軸が他の部材に干渉する場合があり、工作機械は、狭い旋回角度範囲でしかテーブルの姿勢を測定することができない。
【0006】
一方で、テーブル上における基準物体の間隔が短い場合には、主軸と他の部材との干渉を回避することができ、工作機械は、より広い旋回角度範囲でテーブルの姿勢を測定することができる。しかしながら、この場合には、工作機械は、テーブルの姿勢を正確に測定することができない。
【0007】
上記の点に鑑み、テーブルの旋回軸に係る幾何誤差を算出するために、より広い旋回角度の範囲でテーブルの運動を正確に捉えるための技術が望まれている。
【課題を解決するための手段】
【0008】
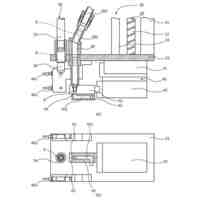
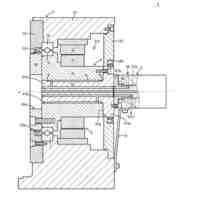
本開示の一例では、ワークを載置可能なテーブルの旋回軸の誤差補正処理に用いられる実測値を測定することが可能な工作機械が提供される。上記テーブルは、基準物体を装着可能に構成されている。上記テーブル上における上記基準物体の装着位置は、上記テーブル上の第1領域に属し、かつ上記テーブル上の第2領域に属さない1つ以上の第1基準位置と、上記第1領域と上記第2領域との重複領域に属する1つ以上の第2基準位置と、上記第2領域に属し、かつ上記第1領域に属さない1つ以上の第3基準位置とを含む。上記工作機械は、さらに、上記旋回軸を中心として上記テーブルを旋回駆動するためのテーブル駆動部と、タッチプローブを装着可能な主軸と、上記テーブルに対して上記主軸を相対的に送り駆動するための主軸駆動部と、上記工作機械を制御するための制御部とを備える。上記制御部は、上記旋回軸を中心として予め定められた角度範囲で上記テーブルを旋回駆動する駆動処理と、上記テーブルが上記予め定められた角度範囲内の第1旋回角度に駆動された際に、上記第1基準位置と上記第2基準位置とにおいて上記基準物体の位置を上記タッチプローブで測定する第1測定処理と、上記テーブルが上記予め定められた角度範囲内の第2旋回角度に駆動された際に、上記第1基準位置と上記第2基準位置と上記第3基準位置とにおいて上記基準物体の位置を上記タッチプローブで測定する第2測定処理と、上記テーブルが上記予め定められた角度範囲内の第3旋回角度に駆動された際に、上記第2基準位置と上記第3基準位置とにおいて上記基準物体の位置を上記タッチプローブで測定する第3測定処理と、上記第1~第3測定処理で測定された各位置を上記実測値として出力する出力処理とを実行する。上記第2旋回角度は、上記第1旋回角度と、上記第3旋回角度との間の角度である。
【0009】
本開示の一例では、上記制御部は、上記実測値に基づいて、上記誤差補正処理をさらに実行する。上記誤差補正処理では、上記旋回軸に係る旋回中心と、上記旋回軸に係る幾何誤差とが算出される。
【0010】
本開示の一例では、上記第1基準位置の数は、2つ以上である。上記第3基準位置の数は、2つ以上である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
DMG森精機株式会社
工作機械
今日
DMG森精機株式会社
段取りステーションおよび工作機械
28日前
DMG森精機株式会社
工作機械、測定方法、および測定プログラム
22日前
DMG森精機株式会社
管理装置、管理方法、および管理プログラム
27日前
DMG森精機株式会社
ロボット搭載移動装置
1か月前
DMG森精機株式会社
管理装置、管理方法、および管理プログラム
27日前
個人
フライス盤
2か月前
日東精工株式会社
ねじ締め機
2か月前
日東精工株式会社
ねじ締め機
6か月前
日東精工株式会社
ねじ締め機
1か月前
日東精工株式会社
ねじ締め機
3か月前
株式会社北川鉄工所
回転装置
5か月前
日東精工株式会社
ねじ締め装置
2か月前
株式会社ダイヘン
溶接電源装置
3か月前
ダイニチ工業株式会社
配膳治具
22日前
株式会社ダイヘン
溶接電源装置
4か月前
日東精工株式会社
ねじ締め装置
4か月前
株式会社ダイヘン
溶接電源装置
4か月前
キヤノン電子株式会社
加工装置
19日前
日東精工株式会社
ねじ整列トレー
14日前
株式会社FUJI
工作機械
1か月前
株式会社FUJI
工作機械
1か月前
株式会社FUJI
工作機械
4か月前
株式会社FUJI
工作機械
5か月前
個人
切削油供給装置
3か月前
キヤノン電子株式会社
加工システム
3か月前
株式会社富田製作所
支持構造
27日前
睦月電機株式会社
金属表面処理方法
19日前
株式会社アンド
半田付け方法
2か月前
個人
型枠製造装置のフレーム
1か月前
中国電力株式会社
養生シート
1か月前
大見工業株式会社
ドリル
3か月前
株式会社向洋技研
スタッドの製造方法
21日前
株式会社ツガミ
工作機械
2か月前
株式会社不二越
ブローチ盤
2か月前
住友重機械工業株式会社
加工装置
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ