TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025163413
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024066621
出願日
2024-04-17
発明の名称
情報処理装置、情報処理方法、コンピュータプログラム、及び記憶媒体
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/639 20240101AFI20251022BHJP(制御;調整)
要約
【課題】
状況に合わせて障害物の移動先を探索することが可能な情報処理装置を提供する。
【解決手段】
情報処理装置において、移動体に対する障害物に関する情報を取得する障害物情報取得手段と、前記移動体の周囲の環境情報を取得する環境情報取得手段と、前記障害物に関する情報と前記環境情報とに基づいて、前記移動体の通行の妨げにならない移動先に前記障害物を移動させる場合の前記移動先を探索する障害物移動先探索手段と、を備えることを特徴とする。
【選択図】 図4
特許請求の範囲
【請求項1】
移動体に対する障害物に関する情報を取得する障害物情報取得手段と、
前記移動体の周囲の環境情報を取得する環境情報取得手段と、
前記障害物に関する情報と前記環境情報とに基づいて、前記移動体の通行の妨げにならない移動先に前記障害物を移動させる場合の前記移動先を探索する障害物移動先探索手段と、を備える
ことを特徴とする情報処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記障害物移動先探索手段は、前記移動体が前記障害物を避けて通行するためのスペースを確保できる位置を前記障害物の前記移動先として探索する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記障害物を前記移動先まで移動させる際の障害物移動コストを算出する障害物移動コスト算出手段を更に備え、
前記障害物移動先探索手段は、前記障害物移動コストに基づいて前記移動先を探索する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記障害物移動コスト算出手段は、前記障害物を前記移動先に移動させる際の移動距離、移動時間、消費電力、移動方法の少なくとも1つに基づいて前記障害物移動コストを算出する、
ことを特徴とする請求項3に記載の情報処理装置。
【請求項5】
前記障害物を所定の距離だけ移動させる障害物移動試行手段を更に備え、
前記障害物移動コスト算出手段は、前記障害物移動試行手段の試行結果に基づいて前記障害物移動コストを算出し、
前記障害物移動先探索手段は、前記障害物移動コストに基づいて前記移動先を探索する、
ことを特徴とする請求項3に記載の情報処理装置。
【請求項6】
前記障害物移動コストに基づいて前記障害物の移動を実施するか否かを判定する障害物移動実施判定手段、を更に備える、
ことを特徴とする請求項3に記載の情報処理装置。
【請求項7】
前記障害物移動実施判定手段は、前記障害物の前記移動先に関する制約の有無の判定、又は前記移動体が前記障害物を避けて通行可能かの判定、前記障害物の前記移動先が他の移動体の通行を妨げるか否かの判定、の少なくとも1つの判定に基づいて前記障害物の移動を実施するか否かを判定する、
ことを特徴とする請求項6に記載の情報処理装置。
【請求項8】
前記障害物を所定の距離だけ移動させる障害物移動試行手段を更に備え、
前記障害物移動実施判定手段は、前記障害物移動試行手段の試行結果に基づいて前記障害物の移動を実施するか否かを判定する、
ことを特徴とする請求項6に記載の情報処理装置。
【請求項9】
前記障害物を移動させる前の位置を記憶する障害物位置記憶手段と、
前記障害物の移動後に前記障害物位置記憶手段にて記憶した前記障害物の移動前の前記位置まで、前記障害物を復帰させる移動経路と前記移動体が前記障害物を移動させる方法を決定する障害物復帰方法決定手段と、を更に備える
ことを特徴とする請求項1に記載の情報処理装置。
【請求項10】
移動体に対する障害物に関する情報を取得する障害物情報取得ステップと、
前記移動体の周囲の環境情報を取得する環境情報取得ステップと、
前記障害物に関する情報と前記環境情報とに基づいて、前記移動体の通行の妨げにならない移動先に前記障害物を移動させる場合の前記移動先を探索する障害物移動先探索ステップと、を備える
ことを特徴とする情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法、コンピュータプログラム、及び記憶媒体等に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、自律移動ロボットは、進路に障害物があった場合、回避動作を行うか、回避できない場合は別ルートに迂回していた。又、例えば、特許文献1では、掃除ロボットが障害物を回避せずに、障害物を掃除の邪魔にならない予め定めた位置まで移動してから掃除を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6154682号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1では、障害物の移動先を予め定めておく必要があり、未知の場所では障害物を移動させることができなかった。又、既知の場所でも障害物の移動先を設定していなかったり、設定した移動先が障害物を置けない状態だったりした場合などでは障害物を移動させることができなかった。
【0005】
本発明は上記問題を鑑みてなされたものであり、状況に合わせて障害物の移動先を探索することが可能な情報処理装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る情報処理装置は、移動体に対する障害物に関する情報を取得する障害物情報取得手段と、
前記移動体の周囲の環境情報を取得する環境情報取得手段と、
前記障害物に関する情報と前記環境情報とに基づいて、前記移動体の通行の妨げにならない移動先に前記障害物を移動させる場合の前記移動先を探索する障害物移動先探索手段と、を備える
ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、状況に合わせて障害物の移動先を探索することが可能な情報処理装置を提供することができる。
【図面の簡単な説明】
【0008】
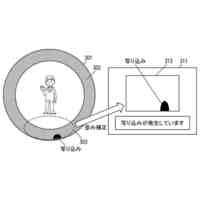
実施形態1に係る情報処理装置の利用シーンの例を示す図である。
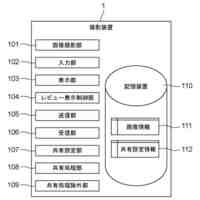
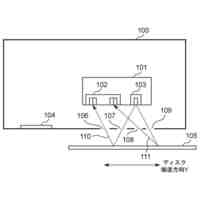
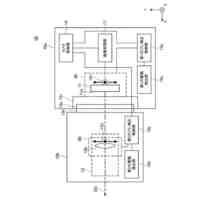
実施形態1に係る情報処理装置100の構成例を示す機能ブロック図である。
実施形態1に係る情報処理装置100のハードウェア構成例を示す図である。
実施形態1に係る情報処理装置が実行する情報処理方法の処理例を示すフローチャートである。
実施形態1におけるステップS105における探索手順の例を示す概念図である。
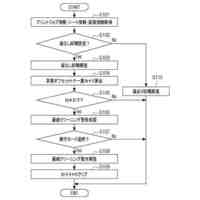
実施形態2における障害物の移動先の探索処理例を示すフローチャートである。
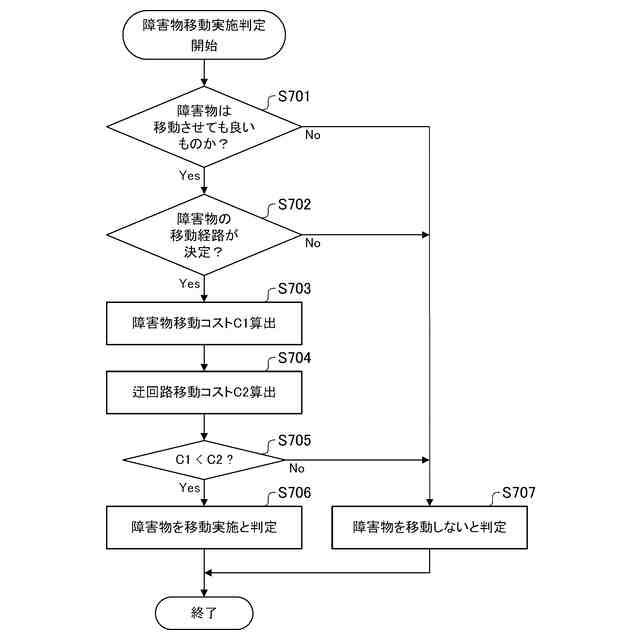
実施形態3に係る障害物移動実施判定のステップS106の処理例を示すフローチャートである。
実施形態5に係る情報処理装置の機能構成例を示す機能ブロック図である。
(A)、(B)は、実施形態5に係る処理手順の例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明の実施形態を説明する。ただし、本発明は以下の実施形態に限定されるものではない。なお、各図において、同一の部材または要素については同一の参照番号を付し、重複する説明は省略または簡略化する。
【0010】
<実施形態1>
実施形態1では、移動体の通行の妨げにならないように障害物を移動させるための、障害物の移動先を探索する例を説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
容器
今日
キヤノン株式会社
容器
6日前
キヤノン株式会社
トナー
27日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
9日前
キヤノン株式会社
現像装置
20日前
キヤノン株式会社
定着装置
21日前
キヤノン株式会社
撮影装置
20日前
キヤノン株式会社
撮像装置
27日前
キヤノン株式会社
記録装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
記録装置
27日前
キヤノン株式会社
撮像装置
23日前
キヤノン株式会社
電子機器
29日前
キヤノン株式会社
記録装置
20日前
キヤノン株式会社
表示装置
今日
キヤノン株式会社
測距装置
15日前
キヤノン株式会社
現像容器
20日前
キヤノン株式会社
現像装置
20日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
現像容器
20日前
キヤノン株式会社
現像装置
13日前
キヤノン株式会社
光学センサ
22日前
キヤノン株式会社
現像剤容器
28日前
キヤノン株式会社
モジュール
22日前
キヤノン株式会社
半導体装置
29日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
映像表示装置
22日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
23日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ