TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025162325
公報種別
公開特許公報(A)
公開日
2025-10-27
出願番号
2024065544
出願日
2024-04-15
発明の名称
搬送ロボットの教示システム、および搬送ロボットの教示方法
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20251020BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ティーチング作業を効率よく行うのに適した搬送ロボットの教示システムを提供する。
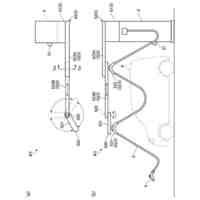
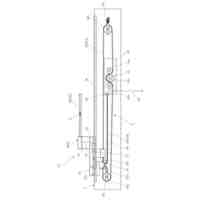
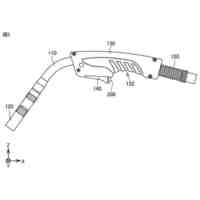
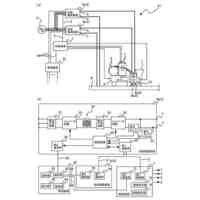
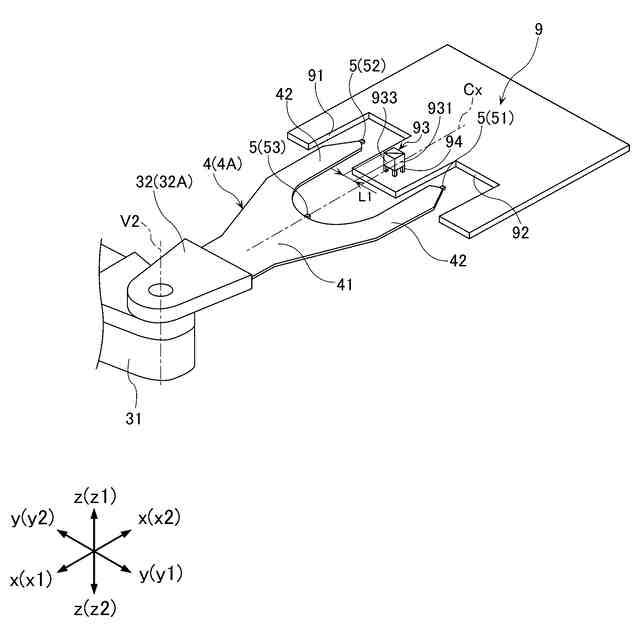
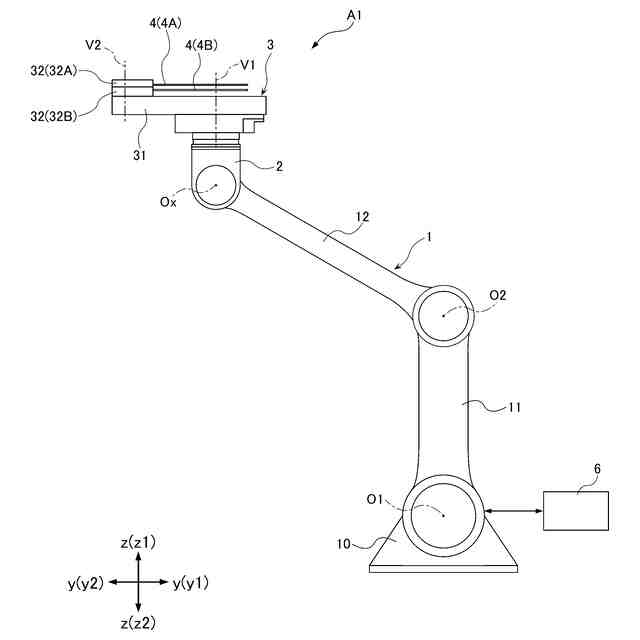
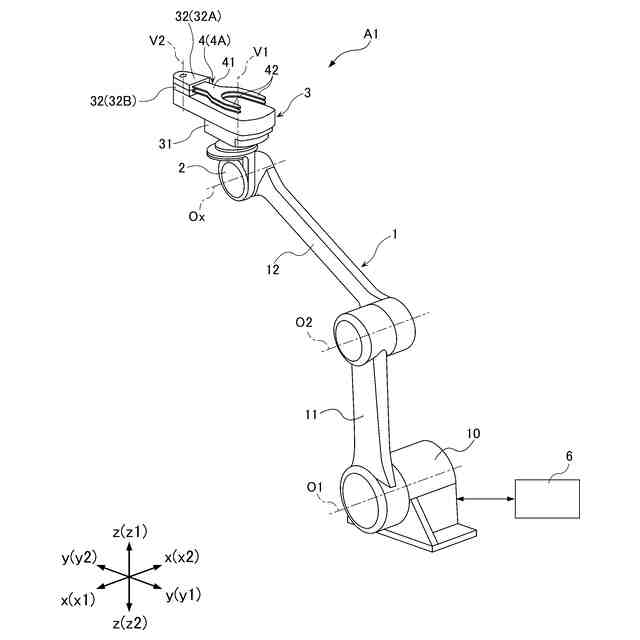
【解決手段】垂直アーム機構と、x方向に延びる軸周りに回動する回動部材と、回動部材に支持された水平アーム機構と、水平アーム機構に支持され、センサ5が設けられたハンド部4と、ターゲット93をセンサ5で検出し、この検出結果を用いてハンド部4の位置を教示する制御装置と、を備える。ターゲット93は、入射した光を分割する光学部品からなり、y方向y1側およびy方向y2側を向く第1面931および第2面と、x方向x1側を向く第3面933と、を有する。センサ5は、投光部51および受光部52,53を備える。制御装置は、ハンド部4を、受光部52が第4面から出射された透過光を受光する状態からy方向に移動させて、受光部53の受光量が最大となる状態までのハンド部4の移動距離に基づき、ハンド部4のy方向の位置を調整する。
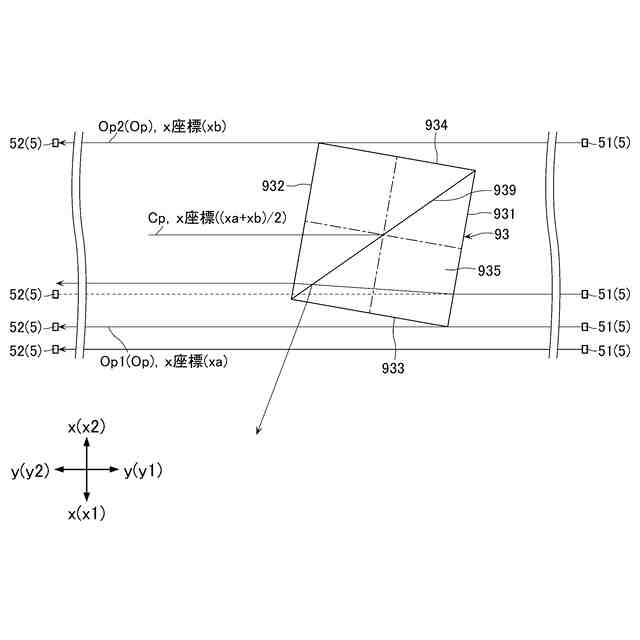
【選択図】図4
特許請求の範囲
【請求項1】
水平な第1方向に対して直交する面内方向に沿って移動する垂直多関節型の垂直アーム機構と、
前記垂直アーム機構に対して前記第1方向に延びる第1回動軸の周りに回動可能に支持された第1回動部材と、
前記第1回動部材に支持された水平多関節型の水平アーム機構と、
前記水平アーム機構に支持されており、物体検出センサが設けられたハンド部と、
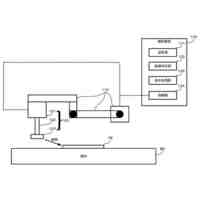
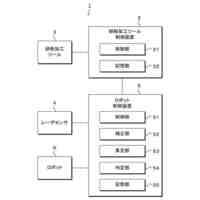
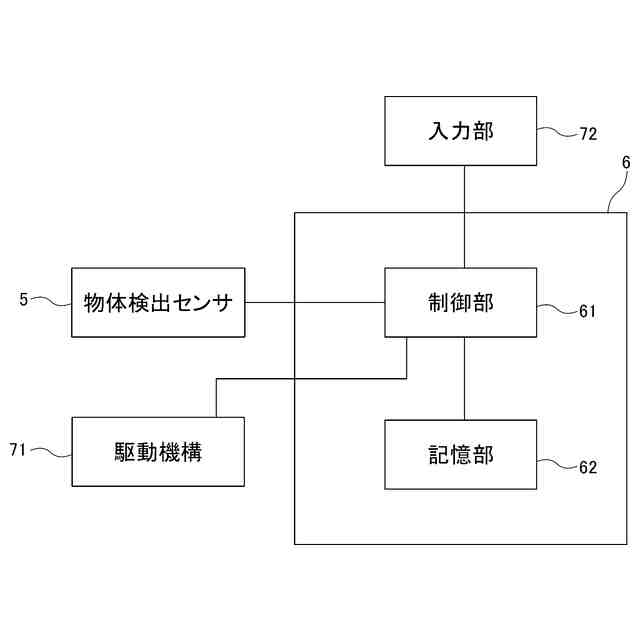
前記ハンド部を移動させながら、検出ターゲットを前記物体検出センサで検出し、この検出結果を用いて前記ハンド部の位置を教示する制御装置と、を備えた搬送ロボットの教示システムであって、
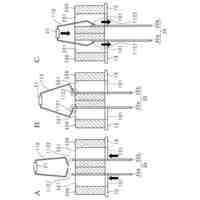
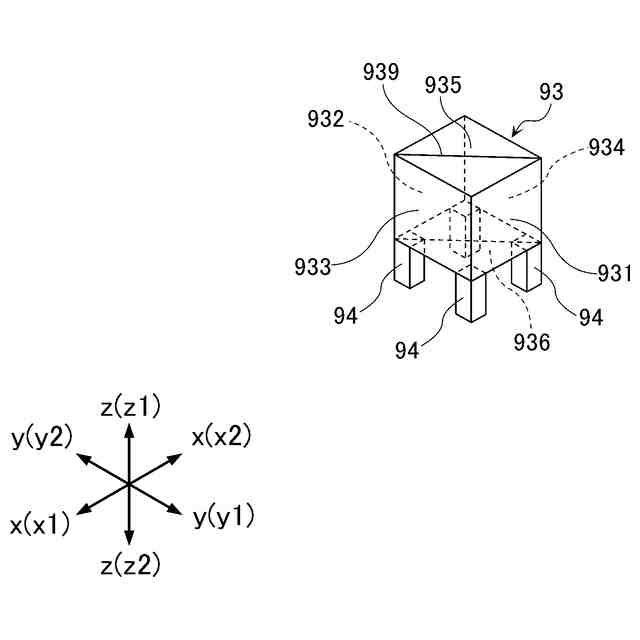
前記検出ターゲットは、入射した光を分割する光学部品からなり、前記第1方向に直交する水平な第2方向の一方側を向く第1面と、前記第2方向の他方側を向き、且つ前記第1面と平行な第2面と、前記第1方向の一方側を向く第3面と、を有し、
前記物体検出センサは、投光部と、当該投光部からの光を受光するための第1受光部および第2受光部と、を備え、
前記投光部からの光が前記第1面から入射して前記検出ターゲットの内部を通過し、前記第2面から透過光が出射するとともに前記第3面から反射光が出射し、
前記第1受光部は、前記第2面から出射された前記透過光を受光可能であり、
前記第2受光部は、前記第3面から出射された前記反射光を受光可能であり、
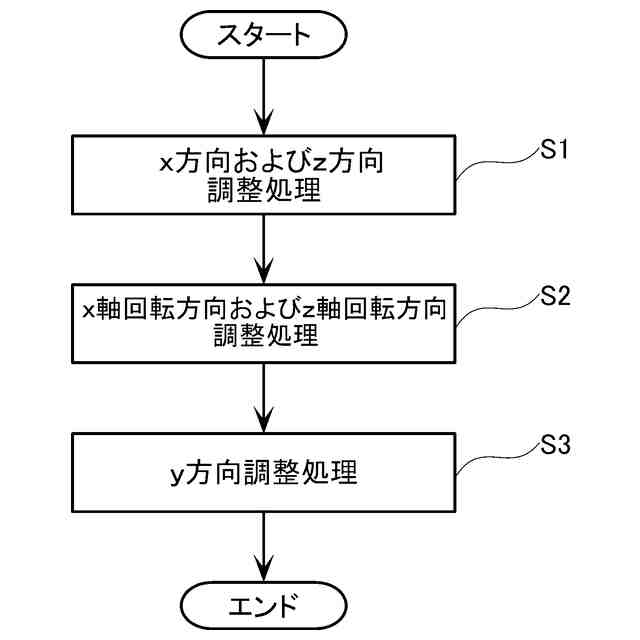
前記制御装置は、前記ハンド部を、前記第1受光部が前記透過光を受光する第1状態から前記第2方向に移動させて、前記第2受光部の受光量が最大となる第2状態までの前記ハンド部の移動距離に基づき、前記ハンド部の前記第2方向の位置を調整する、搬送ロボットの教示システム。
続きを表示(約 1,500 文字)
【請求項2】
前記制御装置は、前記投光部からの光が前記第1面および前記第2面を通過する第3状態から、前記ハンド部を前記第1方向に延びる中心軸線の周りに回動させ、且つ前記ハンド部を前記中心軸線に直交し、且つ前記第1方向および前記第2方向に直交する第3方向に延びる鉛直軸線の周りに回動させて、前記第1受光部の受光量が最大となる第4状態までの前記ハンド部の前記中心軸線の周りの回動角度および前記ハンド部の前記鉛直軸線の周りの回動角度に基づき、前記ハンド部の前記中心軸線の周りの角度、および前記ハンド部の前記鉛直軸線の周りの角度を調整する、請求項1に記載の搬送ロボットの教示システム。
【請求項3】
前記中心軸線および前記鉛直軸線の各々は、前記投光部と前記第1受光部を結ぶ光軸の中央位置において当該光軸と交差している、請求項2に記載の搬送ロボットの教示システム。
【請求項4】
水平な第1方向に対して直交する面内方向に沿って移動する垂直多関節型の垂直アーム機構と、
前記垂直アーム機構に対して前記第1方向に延びる第1回動軸の周りに回動可能に支持された第1回動部材と、
前記第1回動部材に支持された水平多関節型の水平アーム機構と、
前記水平アーム機構に支持されており、物体検出センサが設けられたハンド部と、を備え、前記ハンド部を移動させながら、検出ターゲットを前記物体検出センサで検出し、この検出結果を用いて前記ハンド部の位置を教示する搬送ロボットの教示方法であって、
前記検出ターゲットは、入射した光を分割する光学部品からなり、前記第1方向に直交する水平な第2方向の一方側を向く第1面と、前記第2方向の他方側を向き、且つ前記第1面と平行な第2面と、前記第1方向の一方側を向く第3面と、を有し、
前記物体検出センサは、投光部と、当該投光部からの光を受光するための第1受光部および第2受光部と、を備え、
前記投光部からの光が前記第1面から入射して前記検出ターゲットの内部を通過し、前記第2面から透過光が出射するとともに前記第3面から反射光が出射し、
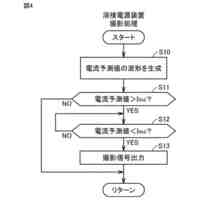
前記第1受光部が前記透過光を受光する第1状態にある前記ハンド部の位置を第1位置として記録するステップと、
前記ハンド部を前記第2方向に移動させて、前記第2受光部の受光量が最大となる第2状態にある前記ハンド部の位置を第2位置として記録するステップと、
前記第1位置から前記第2位置までの前記ハンド部の移動距離に基づき、前記ハンド部の前記第2方向の位置を調整するステップと、を含む、搬送ロボットの教示方法。
【請求項5】
前記ハンド部の前記第2方向の位置を調整するステップの前にそれぞれ行われ、
前記投光部からの光が前記第1面および前記第2面を通過する第3状態にある前記ハンド部の位置を第3位置として記録するステップと、
前記ハンド部を、前記第3位置から前記第1方向に延びる中心軸線の周りに回動させ、且つ前記中心軸線に直交し、且つ前記第1方向および前記第2方向に直交する第3方向に延びる鉛直軸線の周りに回動させて、前記第1受光部の受光量が最大となる第4状態にある前記ハンド部の位置を第4位置として記録するステップと、
前記第3位置および前記第4位置に基づき、前記ハンド部の前記中心軸線の周りの角度、および前記ハンド部の前記鉛直軸線の周りの角度を調整するステップと、をさらに含む、請求項4に記載の搬送ロボットの教示方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送ロボットの教示システム、および搬送ロボットの教示方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
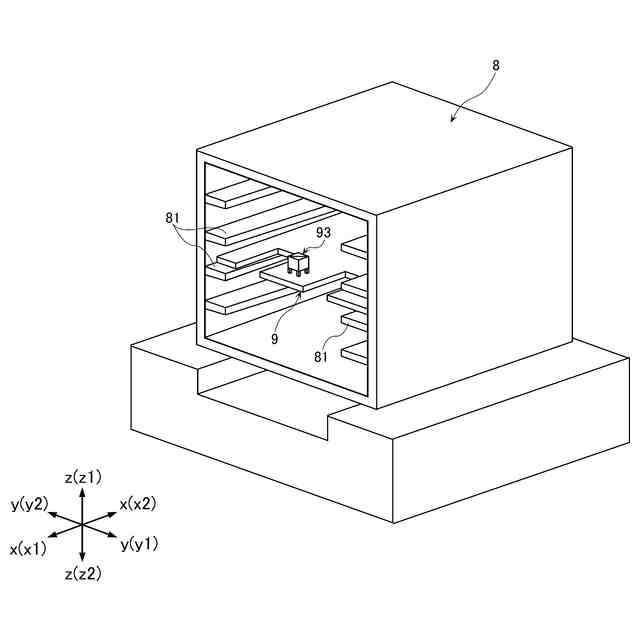
半導体基板や液晶基板などの製造プロセスでは、複数枚の基板をカセットと呼ばれる基板搬送容器に多段収納し、そのカセットをプロセス装置や検査装置に搬送してカセット内の基板のプロセス処理や検査処理が行われる。そして、プロセス装置や検査装置では、搬送されたカセットに基板を収納したり、カセットから基板を取り出したりする産業用ロボットとして、搬送ロボットが用いられている。搬送ロボットがカセットに基板を収納したり、カセットから基板を取り出したりするための動作は、あらかじめティーチング作業によって作業者が教示しておく必要がある。
【0003】
このティーチング作業に大変時間がかかるという問題がある。カセット内で各基板を収納するためのスロットは大変狭く、あまり余分な隙間がない。また、カセットの内部は開口面以外からは見ることができない場合があり、この場合、開口面の前に搬送ロボットが位置するので、カセットの内部は非常に見えにくい。この狭いスロットに基板を出し入れするための動作を、作業者が手作業で、自分の目と勘に頼って、搬送ロボットを操作することで教示する必要がある。
【0004】
特許文献1には、ハンドに設けられた物体検出センサによって治具に設けられた突出部を検出し、この検出結果によりティーチングを行う構成が開示されている。このような構成によれば、作業者による手作業のティーチングが不要であり、ティーチング作業にかかる時間を短縮することができる。しかしながら、搬送ロボットの構成によっては、特許文献1に記載されたティーチング手法では効率的にティーチング作業を行うのが困難であった。
【先行技術文献】
【特許文献】
【0005】
特開2015-153809号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本開示は、このような事情のもとで考え出されたものであって、ティーチング作業を効率よく行うのに適した搬送ロボットの教示システムを提供することを主たる課題とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するため、本開示では、次の技術的手段を採用した。
【0008】
本開示の第1の側面によって提供される搬送ロボットの教示システムは、 水平な第1方向に対して直交する面内方向に沿って移動する垂直多関節型の垂直アーム機構と、前記垂直アーム機構に対して前記第1方向に延びる第1回動軸の周りに回動可能に支持された第1回動部材と、前記第1回動部材に支持された水平多関節型の水平アーム機構と、前記水平アーム機構に支持されており、物体検出センサが設けられたハンド部と、前記ハンド部を移動させながら、検出ターゲットを前記物体検出センサで検出し、この検出結果を用いて前記ハンド部の位置を教示する制御装置と、を備えた搬送ロボットの教示システムであって、前記検出ターゲットは、入射した光を分割する光学部品からなり、前記第1方向に直交する水平な第2方向の一方側を向く第1面と、前記第2方向の他方側を向き、且つ前記第1面と平行な第2面と、前記第1方向の一方側を向く第3面と、を有し、前記物体検出センサは、投光部と、当該投光部からの光を受光するための第1受光部および第2受光部と、を備え、前記投光部からの光が前記第1面から入射して前記検出ターゲットの内部を通過し、前記第2面から透過光が出射するとともに前記第3面から反射光が出射し、前記第1受光部は、前記第2面から出射された前記透過光を受光可能であり、前記第2受光部は、前記第3面から出射された前記反射光を受光可能であり、前記制御装置は、前記ハンド部を、前記第1受光部が前記透過光を受光する第1状態から前記第2方向に移動させて、前記第2受光部の受光量が最大となる第2状態までの前記ハンド部の移動距離に基づき、前記ハンド部の前記第2方向の位置を調整する。
【0009】
好ましい実施の形態においては、前記制御装置は、前記投光部からの光が前記第1面および前記第2面を通過する第3状態から、前記ハンド部を前記第1方向に延びる中心軸線の周りに回動させ、且つ前記ハンド部を前記中心軸線に直交し、且つ前記第1方向および前記第2方向に直交する第3方向に延びる鉛直軸線の周りに回動させて、前記第1受光部の受光量が最大となる第4状態までの前記ハンド部の前記中心軸線の周りの回動角度および前記ハンド部の前記鉛直軸線の周りの回動角度に基づき、前記ハンド部の前記中心軸線の周りの角度、および前記ハンド部の前記鉛直軸線の周りの角度を調整する。
【0010】
好ましい実施の形態においては、前記中心軸線および前記鉛直軸線の各々は、前記投光部と前記第1受光部を結ぶ光軸の中央位置において当該光軸と交差している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
充電装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
充電装置
1か月前
株式会社ダイヘン
制御装置
1か月前
株式会社ダイヘン
溶接トーチ
15日前
株式会社ダイヘン
電極交換装置
15日前
株式会社ダイヘン
研削システム
15日前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
パルス電源装置
1か月前
株式会社ダイヘン
変圧器組立装置
1か月前
株式会社ダイヘン
インバータ装置
1か月前
株式会社ダイヘン
インバータ装置
1か月前
株式会社ダイヘン
レーザ接合装置
15日前
株式会社ダイヘン
積層造形システム
20日前
株式会社ダイヘン
パワーモジュール
1か月前
株式会社ダイヘン
積層造形システム
20日前
株式会社ダイヘン
パワーモジュール
1か月前
株式会社ダイヘン
パワーモジュール
1か月前
株式会社ダイヘン
熱加工用電源装置
27日前
株式会社ダイヘン
熱加工用電源装置
21日前
株式会社ダイヘン
積層造形システム
20日前
株式会社ダイヘン
アーク溶接システム
1か月前
株式会社ダイヘン
溶接ワイヤ送給装置
15日前
株式会社ダイヘン
溶接ワイヤ送給機構
15日前
株式会社ダイヘン
溶接ワイヤ送給機構
15日前
株式会社ダイヘン
パルスアーク溶接制御方法
7日前
株式会社ダイヘン
制御装置及び研削システム
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
7日前
株式会社ダイヘン
サブマージアーク溶接システム
1か月前
株式会社ダイヘン
サブマージアーク溶接システム
1か月前
株式会社ダイヘン
充電装置、および、電力システム
1か月前
株式会社ダイヘン
変圧器組立方法及び変圧器組立装置
1か月前
株式会社ダイヘン
溶接ワイヤ送給機構およびインレットガイド
15日前
株式会社ダイヘン
ティーチングチップおよびこれを装着した溶接ロボット
20日前
株式会社ダイヘン
搬送ロボットの教示システム、および搬送ロボットの教示方法
1か月前
株式会社ダイヘン
搬送ロボットの教示システム、および搬送ロボットの教示方法
23日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ