TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152975
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055196
出願日
2024-03-29
発明の名称
サブマージアーク溶接システム
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B23K
9/18 20060101AFI20251002BHJP(工作機械;他に分類されない金属加工)
要約
【課題】作業者の負担を軽減し、かつ、ランニングスタートを適切に実施できるサブマージアーク溶接システムを提供する。
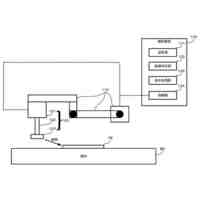
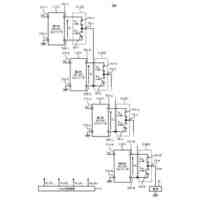
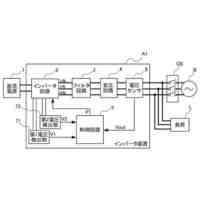
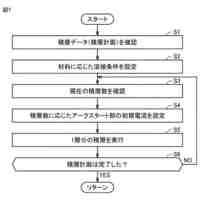
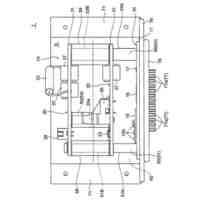
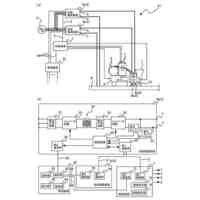
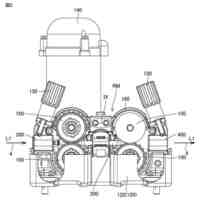
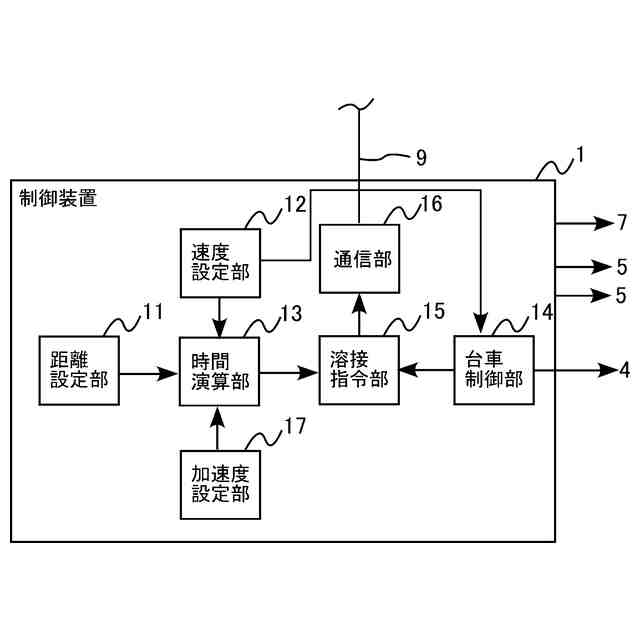
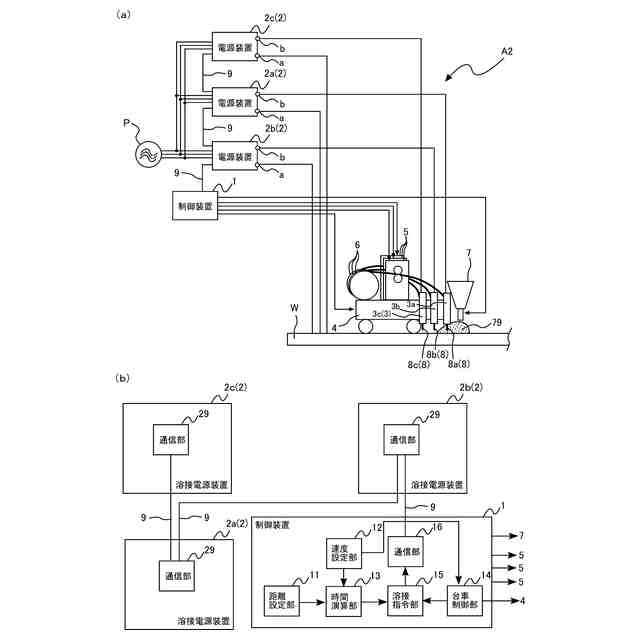
【解決手段】溶接システムA1において、被溶接物Wに対してアークを発生させて溶接を行う電極8aと、電極8aより遅れて溶接個所に到達し、アークを発生させて溶接を行う電極8bと、電極8aおよび電極8bが搭載され、溶接線に沿って走行する台車4と、台車4を制御する制御装置1とを備えた。制御装置1は、台車4の走行速度を設定する速度設定部12と、電極8aの先端と電極8bの先端との離間距離を設定する距離設定部11と、走行速度および離間距離に基づいて遅延時間T1を演算する時間演算部13とを備え、溶接開始時に、電極8aでのアークの発生を開始させ、台車4の走行を開始させ、台車4の走行開始から遅延時間T1経過後に、電極8bでのアークの発生を開始させる。
【選択図】図1
特許請求の範囲
【請求項1】
サブマージアーク溶接を行うためのサブマージアーク溶接システムであって、
被溶接物に対してアークを発生させて溶接を行う第1電極と、
前記第1電極より遅れて前記被溶接物の溶接個所に到達し、アークを発生させて溶接を行う第2電極と、
前記第1電極および前記第2電極が搭載され、溶接線に沿って走行する台車と、
前記台車を制御する制御装置と、
を備え、
前記制御装置は、
前記台車の走行速度を設定する速度設定部と、
前記第1電極の先端と前記第2電極の先端との離間距離を設定する距離設定部と、
前記走行速度および前記離間距離に基づいて遅延時間を演算する時間演算部と、
を備え、
溶接開始時に、前記第1電極でのアークの発生を開始させ、前記台車の走行を開始させ、前記台車の走行開始から前記遅延時間経過後に、前記第2電極でのアークの発生を開始させる、
サブマージアーク溶接システム。
続きを表示(約 1,000 文字)
【請求項2】
前記時間演算部は、前記離間距離を前記走行速度で除算することで、前記遅延時間を演算する、
請求項1に記載のサブマージアーク溶接システム。
【請求項3】
前記台車の加速度を設定する加速度設定部をさらに備え、
前記時間演算部は、前記加速度も用いて、前記遅延時間を演算する、
請求項1に記載のサブマージアーク溶接システム。
【請求項4】
前記第2電極より遅れて前記溶接個所に到達し、アークを発生させて溶接を行う第3電極をさらに備え、
前記距離設定部は、前記第1電極の先端と前記第3電極の先端との第2離間距離をさらに設定し、
前記時間演算部は、前記走行速度および前記第2離間距離に基づいて第2遅延時間をさらに演算し、
前記制御装置は、前記台車の走行開始から前記第2遅延時間経過後に、前記第3電極でのアークの発生を開始させる、
請求項1ないし3のいずれかに記載のサブマージアーク溶接システム。
【請求項5】
前記台車に搭載されてフラックスを散布する散布装置をさらに備え、
前記距離設定部は、前記台車の進行方向における、溶接開始点と前記散布装置のフラックス散布口との第1距離をさらに設定し、
前記時間演算部は、前記走行速度および前記第1距離に基づいて第1時間をさらに演算し、
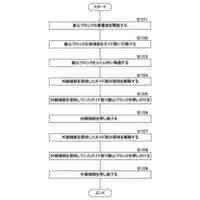
前記制御装置は、
前記台車の走行開始から前記第1時間が経過したときに、前記散布装置に前記フラックスの散布を開始させ、
前記第1電極でのアークの発生から前記遅延時間が経過したときに、前記第2電極でのアークの発生を開始させる、
請求項1に記載のサブマージアーク溶接システム。
【請求項6】
前記台車とともに移動し、前記フラックスを回収する回収装置をさらに備え、
前記距離設定部は、前記台車の前記進行方向における、前記第2電極と前記回収装置のフラックス回収口との第2距離をさらに設定し、
前記時間演算部は、前記走行速度および前記第2距離に基づいて第2時間をさらに演算し、
前記制御装置は、前記第2電極でのアークの発生から前記第2時間が経過したときに、前記回収装置に前記フラックスの回収を開始させる、
請求項5に記載のサブマージアーク溶接システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、サブマージアーク溶接を行うためのサブマージアーク溶接システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、サブマージアーク溶接が知られている。サブマージアーク溶接は、被溶接物の上に粒上のフラックスを散布し、フラックスの中に溶接ワイヤを送給して、溶接ワイヤ(電極)の先端と被溶接物との間にアークを発生させて溶接を行うものである。サブマージアーク溶接では、例えば台車を溶接線に沿って走行させることで、溶接個所を移動させながら溶接を行う。サブマージアーク溶接では、太径の溶接ワイヤに大電流を流すことで、厚板を高能率で溶接することができる。また、サブマージアーク溶接において、複数の電極を用いて、各電極でアークを発生させて溶接を行う方法が知られている。特許文献1には、複数の電極を用いたサブマージアーク溶接法が開示されている。
【0003】
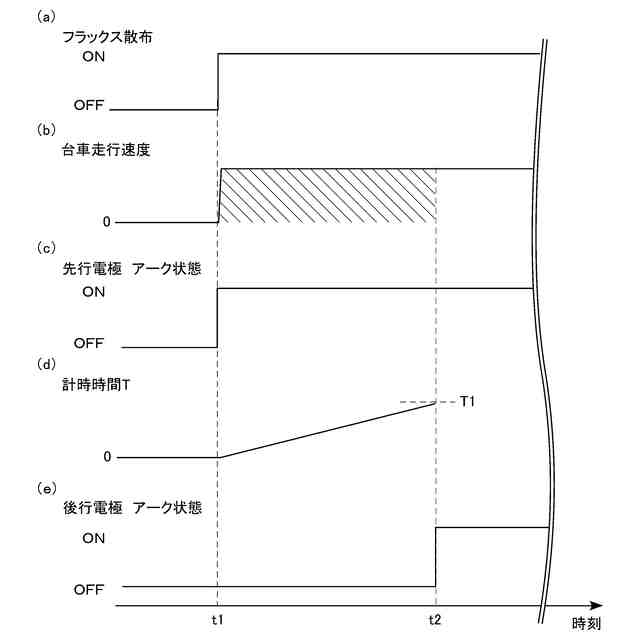
複数の電極を用いたサブマージアーク溶接においては、溶接開始時のいわゆるランニングスタートが知られている。ランニングスタートでは、まず、先行の電極がアークの発生を開始し、その直後に各電極を搭載した台車の走行が開始する。そして、後行の電極は、先行の電極のアークによって被溶接物に形成された溶融池上に到達したときに、アークの発生を開始する。
【先行技術文献】
【特許文献】
【0004】
特開平4-309471号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ランニングスタート方法では、作業者が、後行の電極が溶融池上に到達したことを視認して、後行の電極でのアークの発生を開始させる。この場合、後行の電極でのアークの発生開始のタイミングを適切に合わせないとビードの品質が低下するので、作業者に熟練した技能が必要になる。熟練した作業者でなくてもランニングスタートを適切に実施できるようにするためには、先行の電極と後行の電極とで、アークの発生開始のタイミングをずらす遅延時間をあらかじめ設定する方法がある。しかし、適切なタイミングとなる遅延時間を決定するためには、実際に溶接作業を何度も試す必要があり、多くの時間を必要とするので、作業者の負担になる。また、台車の走行速度を変更すると、適切な遅延時間も変化するので、再度、遅延時間を決定する必要がある。
【0006】
本発明は、上記した事情のもとで考え出されたものであって、作業者の負担を軽減し、かつ、ランニングスタートを適切に実施できるサブマージアーク溶接システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明によって提供されるサブマージアーク溶接システムは、サブマージアーク溶接を行うためのサブマージアーク溶接システムであって、被溶接物に対してアークを発生させて溶接を行う第1電極と、前記第1電極より遅れて前記被溶接物の溶接個所に到達し、アークを発生させて溶接を行う第2電極と、前記第1電極および前記第2電極が搭載され、溶接線に沿って走行する台車と、前記台車を制御する制御装置と、を備え、前記制御装置は、前記台車の走行速度を設定する速度設定部と、前記第1電極の先端と前記第2電極の先端との離間距離を設定する距離設定部と、前記走行速度および前記離間距離に基づいて遅延時間を演算する時間演算部と、を備え、溶接開始時に、前記第1電極でのアークの発生を開始させ、前記台車の走行を開始させ、前記台車の走行開始から前記遅延時間経過後に、前記第2電極でのアークの発生を開始させる。
【0008】
本発明の好ましい実施の形態においては、前記時間演算部は、前記離間距離を前記走行速度で除算することで、前記遅延時間を演算する。
【0009】
本発明の好ましい実施の形態においては、前記台車の加速度を設定する加速度設定部をさらに備え、前記時間演算部は、前記加速度も用いて、前記遅延時間を演算する。
【0010】
本発明の好ましい実施の形態においては、前記第2電極より遅れて前記溶接個所に到達し、アークを発生させて溶接を行う第3電極をさらに備え、前記距離設定部は、前記第1電極の先端と前記第3電極の先端との第2離間距離をさらに設定し、前記時間演算部は、前記走行速度および前記第2離間距離に基づいて第2遅延時間を演算し、前記制御装置は、前記台車の走行開始から前記第2遅延時間経過後に、前記第3電極でのアークの発生を開始させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
搬送装置
29日前
株式会社ダイヘン
制御装置
29日前
株式会社ダイヘン
充電装置
29日前
株式会社ダイヘン
充電装置
29日前
株式会社ダイヘン
充電装置
29日前
株式会社ダイヘン
充電装置
29日前
株式会社ダイヘン
溶接トーチ
4日前
株式会社ダイヘン
溶接電源装置
29日前
株式会社ダイヘン
電極交換装置
4日前
株式会社ダイヘン
回生ユニット
1か月前
株式会社ダイヘン
研削システム
4日前
株式会社ダイヘン
パルス電源装置
29日前
株式会社ダイヘン
レーザ接合装置
4日前
株式会社ダイヘン
変圧器組立装置
29日前
株式会社ダイヘン
インバータ装置
29日前
株式会社ダイヘン
インバータ装置
24日前
株式会社ダイヘン
パワーモジュール
29日前
株式会社ダイヘン
パワーモジュール
29日前
株式会社ダイヘン
積層造形システム
9日前
株式会社ダイヘン
熱加工用電源装置
16日前
株式会社ダイヘン
熱加工用電源装置
10日前
株式会社ダイヘン
積層造形システム
9日前
株式会社ダイヘン
積層造形システム
9日前
株式会社ダイヘン
パワーモジュール
29日前
株式会社ダイヘン
アーク溶接システム
29日前
株式会社ダイヘン
直流パルス電源装置
1か月前
株式会社ダイヘン
溶接ワイヤ送給機構
4日前
株式会社ダイヘン
溶接ワイヤ送給機構
4日前
株式会社ダイヘン
溶接ワイヤ送給装置
4日前
株式会社ダイヘン
制御装置及び研削システム
29日前
株式会社ダイヘン
サブマージアーク溶接システム
29日前
株式会社ダイヘン
サブマージアーク溶接システム
29日前
株式会社ダイヘン
充電装置、および、電力システム
22日前
株式会社ダイヘン
通信システム、および、通信方法
1か月前
株式会社ダイヘン
変圧器組立方法及び変圧器組立装置
29日前
株式会社ダイヘン
溶接ワイヤ送給機構およびインレットガイド
4日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ