TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025161093
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024064007
出願日
2024-04-11
発明の名称
真空処理装置
出願人
株式会社日立ハイテク
代理人
弁理士法人平木国際特許事務所
主分類
H01L
21/68 20060101AFI20251017BHJP(基本的電気素子)
要約
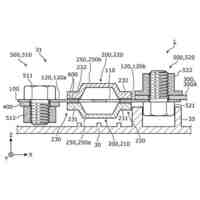
【課題】搬送ロボットが試料を試料ステージへ搬送する際に、ステージが有する試料載置面の基準座標と試料の中心座標を精度よく一致させることができる、真空処理装置を提供する。
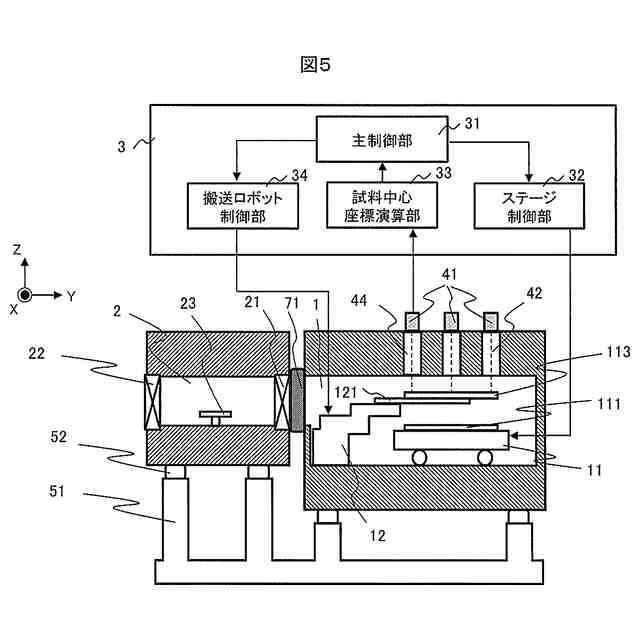
【解決手段】本開示に係る真空処理装置は、真空試料室内へ搬送された試料の外縁の位置を計測し、計測した前記外縁の位置に基づいて、前記真空試料室内へ搬送された前記試料の下方に試料ステージを移動する。
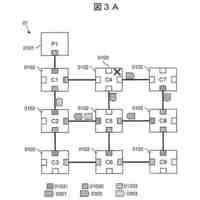
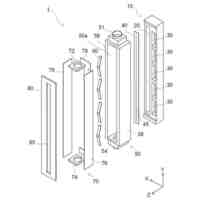
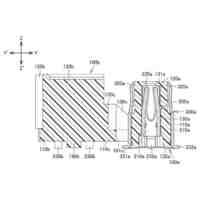
【選択図】図1
特許請求の範囲
【請求項1】
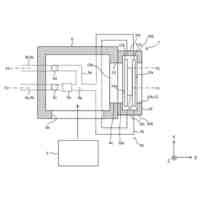
試料を真空中で処理する真空試料室、
予備排気室内にある前記試料を前記真空試料室内へ搬送する搬送ロボット、
前記搬送ロボットによって前記真空試料室内へ搬送された前記試料の外縁の位置を計測する検出器、
前記真空試料室内に配置され、前記試料が保持される載置面を備えたステージ、
前記ステージを制御するコンピュータ、
を備え、
前記コンピュータは、前記計測した前記外縁の位置に基づいて、前記真空試料室内へ搬送された前記試料の下方に前記ステージを移動する
ことを特徴とする真空処理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記搬送ロボットは、前記真空試料室内の搬送目標位置へ前記試料を搬送し、
前記検出器は、前記搬送目標位置上にある前記試料の外縁の位置を計測することができる位置に配置されており、
前記コンピュータは、前記搬送目標位置上における前記試料の外縁の位置に基づき、前記試料の中心座標を計算し、
前記コンピュータは、前記計算した前記中心座標に基づき、前記搬送目標位置上にある前記試料の下方に前記ステージを移動する
ことを特徴とする請求項1記載の真空処理装置。
【請求項3】
前記検出器は、前記搬送目標位置上にある前記試料の外縁の位置を、3点以上計測することができるように配置されており、
前記コンピュータは、前記3点以上の前記外縁の位置に基づき、前記中心座標を計算する
ことを特徴とする請求項2記載の真空処理装置。
【請求項4】
前記真空試料室は、真空隔壁によって大気環境から遮断されており、
前記検出器は、前記真空隔壁の大気環境側に取り付けられており、
前記検出器は、前記試料が前記真空試料室内へ搬送されたとき、前記試料の上方から前記試料を計測するように配置されている
ことを特徴とする請求項1記載の真空処理装置。
【請求項5】
前記検出器は、線分状の光を出射することにより前記外縁の位置を検出するラインセンサとして構成されており、
前記真空隔壁は、前記光のうち少なくとも一部を透過する透過部分を備え、
前記検出器は、前記透過部分を介して前記真空試料室内に前記光を出射するように配置されている
ことを特徴とする請求項4記載の真空処理装置。
【請求項6】
前記コンピュータは、前記計算した前記中心座標と、前記ステージが有する試料載置面の基準座標とが一致するように、前記ステージを移動する
ことを特徴とする請求項2記載の真空処理装置。
【請求項7】
前記コンピュータは、前記試料の下方に前記ステージを移動した後、前記ステージ上に前記試料を移載することにより、前記計測した前記外縁の位置に基づき、前記ステージ上の基準座標に対して前記試料を位置合わせする
ことを特徴とする請求項1記載の真空処理装置。
【請求項8】
前記試料は円板形状であり、
前記検出器は、前記試料の円形外周上の位置を3点以上計測することができるように構成されている
ことを特徴とする請求項1記載の真空処理装置。
【請求項9】
前記真空処理装置はさらに、前記予備排気室と前記真空試料室との間を気密接合するベローズを備え、
前記ベローズは、前記予備排気室と前記真空試料室との間の相対位置を変化させることができるように構成されており、
前記コンピュータは、前記相対位置の下で前記検出器が計測した前記外縁の位置に基づいて、前記試料の下方へ前記ステージを移動する
ことを特徴とする請求項1記載の真空処理装置。
【請求項10】
前記真空処理装置はさらに、前記真空試料室と前記予備排気室との間に配置されたロボット室を備え、
前記ロボット室は、前記搬送ロボットを格納しており、
前記搬送ロボットは、前記予備排気室から前記ロボット室を経由して前記真空試料室へ前記試料を搬送する
ことを特徴とする請求項1記載の真空処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、真空処理装置において、搬送ロボットを用いて試料を試料ステージに移載する技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
半導体の加工・検査に用いられる真空処理装置は、1時間あたりに処理可能なウェーハ枚数(以下、スループット)の向上が強く求められている。荷電粒子線検査装置は高真空環境内で荷電粒子線を照射するので、装置外の大気圧環境と接続するための予備排気室から、真空環境の試料室へ、ウェーハを搬送する。これにより、真空試料室の高真空を維持したまま、予備排気室を用いて大気側の試料ウェーハを装置内に搬送することが可能になり、装置の高スループット化を実現することが可能である。
【0003】
予備排気室と真空試料室との間で試料ウェーハを搬送するために、ハンドを備えた搬送ロボットが用いられる。搬送ロボットによる試料ウェーハの搬送の際、試料ウェーハの中心座標を、試料ステージ上に備えられた試料載置面の基準座標に一致させることが求められる。特に荷電粒子線検査装置においては、試料載置面の周辺に備え付けられたリング状の電極部品に対して、試料ウェーハ外縁部との距離が装置で定められた目標値から乖離すると、試料ウェーハ外縁部の表面電位を試料ウェーハ中央部の表面電位と同等に保つことが難しくなり、試料ウェーハ外縁部で荷電粒子線による表面形状測定の精度を担保できない領域(以下、エッジエクスクルージョン)が増大する。その結果、試料ウェーハ外縁部の半導体デバイスチップの寸法管理を試料ウェーハ中央部のチップと同等に実施することができず、歩留まりは低下する。
【0004】
試料載置面の基準座標と試料ウェーハの中心座標を一致させるように試料ウェーハを搬送することにより、試料ウェーハ外縁部の表面電位を試料ウェーハ中央部の表面電位と同等に保つことが可能となる。これにより、エッジエクスクルージョンは低減され、歩留まり向上に寄与する。以上の理由から、真空処理装置には搬送精度向上のための技術が要求されている。
【0005】
一般的に、搬送精度低下の要因は以下の3つが挙げられる:
(1)試料とハンドとの間の接触部において発生する滑り
(2)搬送ロボットの部品の熱変形
(3)搬送開始位置と搬送目標位置との間の相対位置の変化
【0006】
(1)について、ロボットの動作に伴い、試料とハンドとの間の接触部にはウェーハ面水平方向に慣性力が生じる。試料とハンドとの間の接触部の摩擦力に対し、慣性力が上回った場合に試料がハンドに対して滑り移動し、搬送誤差を生じさせる。搬送ロボットは真空環境下に配置されているので、真空吸着を代表とした圧力差による試料保持手法を実装することは難しい。またアウトガスの観点から、滑りを検出するセンサを搭載することは難しい。
【0007】
(2)について、ロボットは真空中に配置されるので熱の逃げ場が無く、ロボットの繰り返し動作によってロボット内部の部品の温度は上昇する。温度上昇に伴い、ロボット内部の部品が熱膨張し、搬送誤差を生じさせる。
【0008】
(3)について、一般的に予備排気室および真空試料室を備える真空処理装置において、予備排気室と真空試料室との間をゲートバルブで封止する構成の場合、予備排気室と真空試料室との間は強固に接続されているので、真空バルブの開閉動作時の衝撃が真空試料室に対して伝達される。特に荷電粒子線検査装置の場合、荷電粒子線を使用した測定動作中に真空試料室内に対して振動が伝達すると、測定精度の低下を引き起こす。したがって、真空バルブを動作させる間は真空試料室内での測定動作を停止し、また真空試料室内での測定動作を実施している間は、真空バルブの動作を停止することによって、測定精度低下を回避している。しかし、このように真空試料室内での処理停止およびバルブ動作停止は、試料ウェーハ1枚あたりの処理時間の増加につながり、装置のスループット低下を引き起こす。他方で、予備排気室と真空試料室との間をベローズ等の柔らかい構造体で接続する場合、振動を抑制することはできる一方で、予備排気室内に存在する搬送開始位置と、真空試料室内に存在する搬送目標位置との間の相対位置の変化が引き起こされる。
【0009】
特許文献1は、予備排気室および真空試料室との間をベローズで接続し、真空バルブの開閉動作によって発生する振動をベローズが吸収する構成を開示している。
【0010】
特許文献2は、搬送精度を担保する技術として、試料上にパターニングされたアライメントマークを検出器で検出し、ロボットの動作にフィードバックして搬送精度を向上する手法を開示している。また同文献は、真空試料室と予備排気室との間をベローズで接続し、予備排気室において発生する振動を除振する構成を開示している。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立ハイテク
分散制御システム
4日前
株式会社日立ハイテク
ロボット教示装置
4日前
株式会社日立ハイテク
ステージ装置、荷電粒子線装置および真空装置
4日前
APB株式会社
蓄電セル
1か月前
東ソー株式会社
絶縁電線
1か月前
日機装株式会社
加圧装置
3日前
日新イオン機器株式会社
イオン源
1か月前
日新イオン機器株式会社
イオン源
3日前
マクセル株式会社
電源装置
1か月前
ローム株式会社
半導体装置
1か月前
株式会社東芝
端子台
1か月前
株式会社GSユアサ
蓄電設備
1か月前
株式会社ホロン
冷陰極電子源
1か月前
株式会社GSユアサ
蓄電装置
18日前
株式会社GSユアサ
蓄電設備
1か月前
富士電機株式会社
電磁接触器
18日前
三菱電機株式会社
回路遮断器
26日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
ホシデン株式会社
複合コネクタ
12日前
トヨタ自動車株式会社
バッテリ
1か月前
トヨタ自動車株式会社
蓄電装置
1か月前
日新イオン機器株式会社
基板処理装置
1か月前
北道電設株式会社
配電具カバー
1か月前
大電株式会社
電線又はケーブル
10日前
日本特殊陶業株式会社
保持装置
1か月前
株式会社東芝
電子源
3日前
トヨタ自動車株式会社
蓄電装置
10日前
個人
電源ボックス及び電子機器
3日前
株式会社トクミ
ケーブル
4日前
日本特殊陶業株式会社
保持装置
1か月前
トヨタ自動車株式会社
冷却構造
1か月前
日本無線株式会社
レーダアンテナ
1か月前
ローム株式会社
半導体モジュール
19日前
日亜化学工業株式会社
半導体レーザ素子
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ