TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159026
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2025131248,2021182487
出願日
2025-08-06,2021-11-09
発明の名称
基板処理システム
出願人
東京エレクトロン株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H01L
21/677 20060101AFI20251009BHJP(基本的電気素子)
要約
【課題】基板処理システムの設置面積を削減する。
【解決手段】基板処理システムは、1つまたは複数のプロセスモジュールと、真空搬送モジュールとを備える。少なくとも1つのプロセスモジュールと真空搬送モジュールとは、上面視で、プロセスモジュールの少なくとも一部と真空搬送モジュールの少なくとも一部とが重なるように配置されている。
【選択図】図6
特許請求の範囲
【請求項1】
基板の処理を行う複数のプロセスモジュールと、
前記プロセスモジュール内に前記基板を搬送可能な真空搬送モジュールと
を備え、
少なくとも1つの前記プロセスモジュールと前記真空搬送モジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部とが重なるように配置されており、
複数の前記プロセスモジュールは、鉛直方向に重ねて配置されている基板処理システム。
続きを表示(約 2,500 文字)
【請求項2】
基板の処理を行う複数のプロセスモジュールと、
前記プロセスモジュール内に前記基板を搬送可能な真空搬送モジュールと、
前記真空搬送モジュール内に設けられ、前記真空搬送モジュールと前記プロセスモジュールとの間で前記基板を搬送する搬送ロボットと
を備え、
少なくとも1つの前記プロセスモジュールと前記真空搬送モジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部とが重なるように配置されており、
前記搬送ロボットは、
前記基板が載せられる載置部と、
前記載置部を鉛直方向に移動させるアーム部と
を有し、
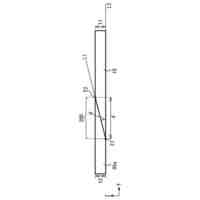
前記アーム部は、
軸が鉛直方向となるように配置された第1の筒体と、
前記第1の筒体内に収容可能であり、前記第1の筒体と同軸となるように配置された第2の筒体と
を含み、
前記アーム部は、
前記第1の筒体に対して前記第2の筒体を摺動させることにより、前記第1の筒体の軸に沿って伸縮し、前記載置部を鉛直方向に移動させる基板処理システム。
【請求項3】
前記真空搬送モジュールは、少なくとも1つの前記プロセスモジュールの上または下に配置されている請求項1または2に記載の基板処理システム。
【請求項4】
前記真空搬送モジュールに接続されたロードロックモジュールをさらに備える請求項1から3のいずれか一項に記載の基板処理システム。
【請求項5】
基板の処理を行う1つまたは複数のプロセスモジュールと、
前記プロセスモジュール内に前記基板を搬送可能な真空搬送モジュールと、
前記真空搬送モジュールに接続されたロードロックモジュールと
を備え、
少なくとも1つの前記プロセスモジュールと前記真空搬送モジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部とが重なるように配置されており、
前記真空搬送モジュールは、少なくとも1つの前記プロセスモジュールの上または下に配置されており、
少なくとも1つの前記プロセスモジュールと前記ロードロックモジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記ロードロックモジュールの少なくとも一部とが重なるように配置されている基板処理システム。
【請求項6】
基板の処理を行う1つまたは複数のプロセスモジュールと、
前記プロセスモジュール内に前記基板を搬送可能な真空搬送モジュールと、
前記真空搬送モジュールに接続されたロードロックモジュールと
を備え、
少なくとも1つの前記プロセスモジュールと前記真空搬送モジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部とが重なるように配置されており、
前記真空搬送モジュールは、少なくとも1つの前記プロセスモジュールの上または下に配置されており、
前記真空搬送モジュールの少なくとも一部は、
少なくとも1つの前記プロセスモジュールと前記ロードロックモジュールとの間に配置されており、
少なくとも1つの前記プロセスモジュールと前記真空搬送モジュールと前記ロードロックモジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部と前記ロードロックモジュールの少なくとも一部とが重なるように配置されている基板処理システム。
【請求項7】
前記ロードロックモジュールは、前記真空搬送モジュールの上または下に配置されている請求項4から6のいずれか一項に記載の基板処理システム。
【請求項8】
前記ロードロックモジュールに接続された大気搬送モジュールをさらに備える請求項4から7のいずれか一項に記載の基板処理システム。
【請求項9】
基板の処理を行う1つまたは複数のプロセスモジュールと、
前記プロセスモジュール内に前記基板を搬送可能な真空搬送モジュールと、
前記真空搬送モジュールに接続されたロードロックモジュールと、
前記ロードロックモジュールに接続された大気搬送モジュールと
を備え、
少なくとも1つの前記プロセスモジュールと前記真空搬送モジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部とが重なるように配置されており、
前記真空搬送モジュールは、少なくとも1つの前記プロセスモジュールの上または下に配置されており、
前記大気搬送モジュールは、
上面視で、前記大気搬送モジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部とが重なるように配置されている基板処理システム。
【請求項10】
基板の処理を行う1つまたは複数のプロセスモジュールと、
前記プロセスモジュール内に前記基板を搬送可能な真空搬送モジュールと、
前記真空搬送モジュールに接続されたロードロックモジュールと、
前記ロードロックモジュールに接続された大気搬送モジュールと
を備え、
少なくとも1つの前記プロセスモジュールと前記真空搬送モジュールとは、
上面視で、前記プロセスモジュールの少なくとも一部と前記真空搬送モジュールの少なくとも一部とが重なるように配置されており、
前記真空搬送モジュールは、少なくとも1つの前記プロセスモジュールの上または下に配置されており、
前記大気搬送モジュールは、前記真空搬送モジュールの上または下に配置されている基板処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の種々の側面および実施形態は、基板処理システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、「各処理ツール200は、ロードロック208の少なくとも一部を収容するように構成された改良装置フロントエンドモジュール(EFEM)204を備える」なる記載がある。また、特許文献1には、「ロードロック208は、EFEM204と真空搬送モジュール(VTM)212との間の隙間でEFEM204の外側に位置するのではなく、EFEM204の内部に延びる」なる記載がある。
【先行技術文献】
【特許文献】
【0003】
特開2020-510310号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、基板処理システムの設置面積を削減することができる基板処理システムを提供する。
【課題を解決するための手段】
【0005】
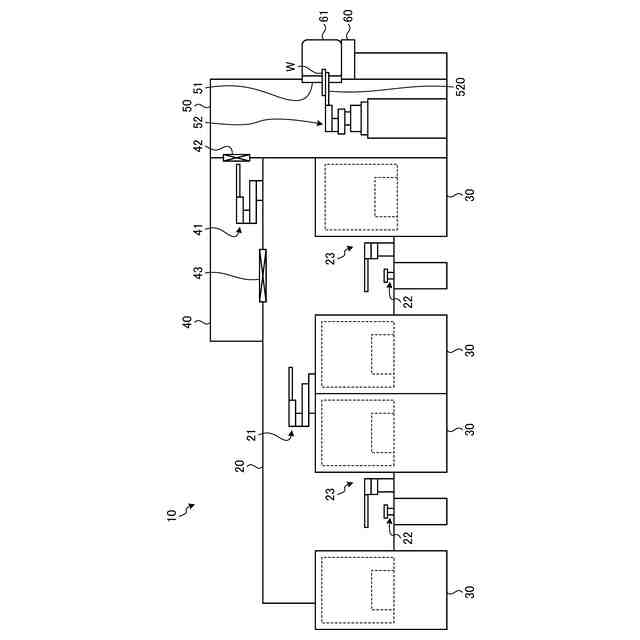
本開示の一側面は、基板処理システムであって、1つまたは複数のプロセスモジュールと、真空搬送モジュールとを備える。少なくとも1つのプロセスモジュールと真空搬送モジュールとは、上面視で、プロセスモジュールの少なくとも一部と真空搬送モジュールの少なくとも一部とが重なるように配置されている。
【発明の効果】
【0006】
本開示の種々の側面および実施形態によれば、基板処理システムの設置面積を削減することができる。
【図面の簡単な説明】
【0007】
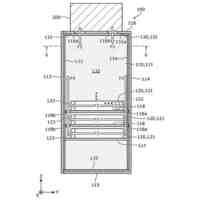
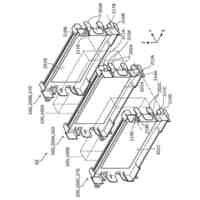
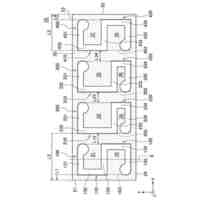
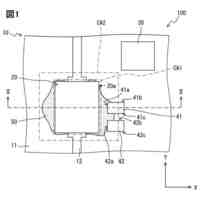
図1は、一実施形態における基板処理システムの一例を示す平面図である。
図2は、図1の矢印Cの方向から見た基板処理システムの一例を示す側面図である。
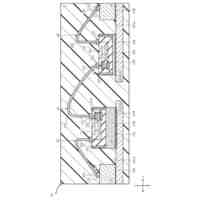
図3は、図1の矢印Dの方向から見た基板処理システムの一例を示す側面図である。
図4は、図1の矢印Eの方向から見た基板処理システムの一例を示す側面図である。
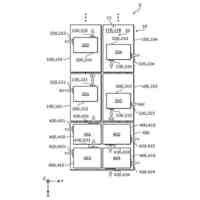
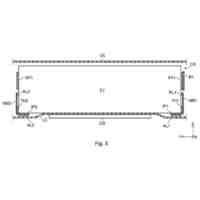
図5は、図1に示された基板処理システムの裏面の一例を示す図である。
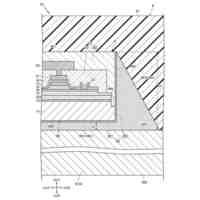
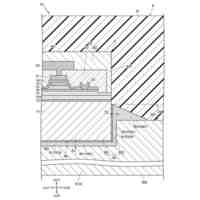
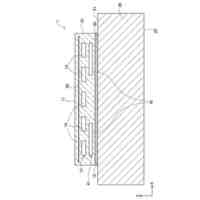
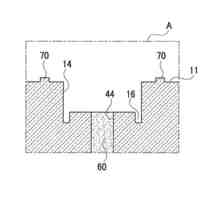
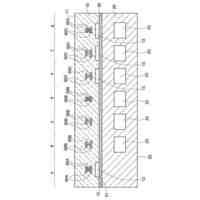
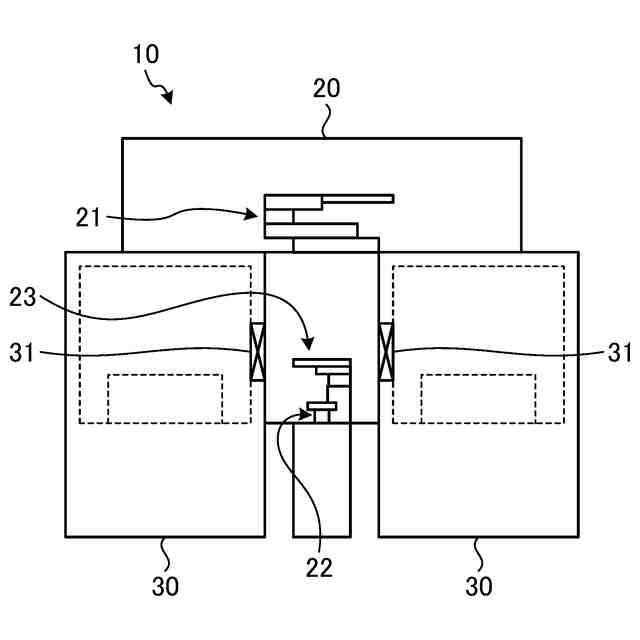
図6は、図1および図5に例示された基板処理システムのA-A断面の一例を示す概略断面図である。
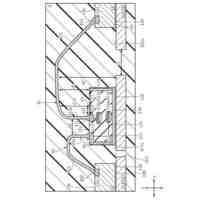
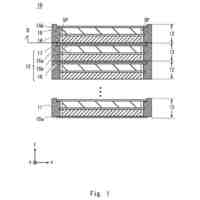
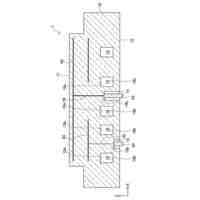
図7は、図1および図5に例示された基板処理システムのB-B断面の一例を示す概略断面図である。
図8は、PMの一例を示す概略断面図である。
図9は、基板の搬送過程の一例を示す図である。
図10は、基板の搬送過程の一例を示す図である。
図11は、基板の受け渡しの過程の一例を示す図である。
図12は、基板の搬送過程の一例を示す図である。
図13は、基板の受け渡しの過程の一例を示す図である。
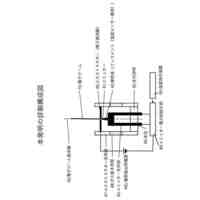
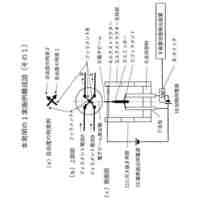
図14は、載置部とアーム部との位置関係の一例を示す図である。
図15は、基板の搬送過程の一例を示す図である。
図16は、基板の受け渡しの過程の一例を示す図である。
図17は、基板の搬送過程の一例を示す図である。
図18は、基板の搬送過程の一例を示す図である。
図19は、基板の受け渡しの過程の一例を示す図である。
図20は、基板の搬送過程の一例を示す図である。
図21は、基板の搬送過程の一例を示す図である。
図22は、基板の搬送過程の一例を示す図である。
図23は、基板処理システムの他の例を示す概略断面図である。
図24は、基板処理システムの他の例を示す概略断面図である。
図25は、基板処理システムの他の例を示す概略断面図である。
図26は、基板処理システムの他の例を示す概略断面図である。
図27は、基板処理システムの他の例を示す概略断面図である。
図28は、基板処理システムの他の例を示す概略断面図である。
【発明を実施するための形態】
【0008】
以下に、基板処理システムの実施形態について、図面に基づいて詳細に説明する。なお、以下の実施形態により、開示される基板処理システムが限定されるものではない。
【0009】
ところで、単位時間あたりに処理可能な基板の数を増やすためには、基板に対する処理を行う処理モジュールを増やすことが考えられる。処理モジュールが増えると、複数の処理モジュール、真空搬送モジュール、ロードロックモジュール、および大気搬送モジュール等を含む基板処理システムが大型化する。基板処理システムが大型化すると、クリーンルーム等の設備内での基板処理システムの設置面積(フットプリント)が大きくなり、複数の基板処理システムを配置することが難しくなる。そのため、基板処理システムの設置面積の削減が求められている。
【0010】
そこで、本開示は、基板処理システムの設置面積を削減することができる技術を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東ソー株式会社
絶縁電線
2日前
APB株式会社
蓄電セル
今日
個人
フレキシブル電気化学素子
14日前
株式会社ユーシン
操作装置
14日前
ローム株式会社
半導体装置
23日前
ローム株式会社
半導体装置
23日前
ローム株式会社
半導体装置
21日前
ローム株式会社
半導体装置
1日前
日新イオン機器株式会社
イオン源
10日前
ローム株式会社
半導体装置
16日前
ローム株式会社
半導体装置
23日前
株式会社ホロン
冷陰極電子源
8日前
株式会社GSユアサ
蓄電設備
14日前
株式会社ホロン
冷陰極電子源
21日前
株式会社GSユアサ
蓄電装置
21日前
オムロン株式会社
電磁継電器
15日前
株式会社GSユアサ
蓄電設備
14日前
太陽誘電株式会社
コイル部品
14日前
太陽誘電株式会社
全固体電池
21日前
個人
半導体パッケージ用ガラス基板
24日前
日本特殊陶業株式会社
保持装置
23日前
日本特殊陶業株式会社
保持装置
21日前
TDK株式会社
電子部品
21日前
トヨタ自動車株式会社
バッテリ
今日
トヨタ自動車株式会社
バッテリ
15日前
トヨタ自動車株式会社
冷却構造
2日前
北道電設株式会社
配電具カバー
今日
サクサ株式会社
電池の固定構造
14日前
日本特殊陶業株式会社
保持装置
3日前
トヨタ自動車株式会社
蓄電装置
14日前
日東電工株式会社
積層体
15日前
日本特殊陶業株式会社
保持装置
25日前
ノリタケ株式会社
熱伝導シート
14日前
日本特殊陶業株式会社
保持装置
21日前
ローム株式会社
半導体装置
16日前
株式会社デンソー
電子装置
25日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ