TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025157973
公報種別
公開特許公報(A)
公開日
2025-10-16
出願番号
2024060369
出願日
2024-04-03
発明の名称
演算処理方法、演算処理プログラム、及び演算処理装置
出願人
株式会社豊田中央研究所
,
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
G01C
19/00 20130101AFI20251008BHJP(測定;試験)
要約
【課題】補正係数のみを用いて方位変化センサの出力を補正する場合と比較して、誤差を低減することを目的とする。
【解決手段】演算処理方法は、コンピュータが、姿勢角センサの出力に応じた車両の水平面に対する姿勢角に基づいて、車両の水平面における方位変化を検出するための方位変化センサの出力を補正する補正係数を算出することと、姿勢角の変化に基づいて、方位変化センサの出力を補正する補正項を算出することと、補正係数及び補正項を用いて、方位変化センサの出力を補正することと、を有する。
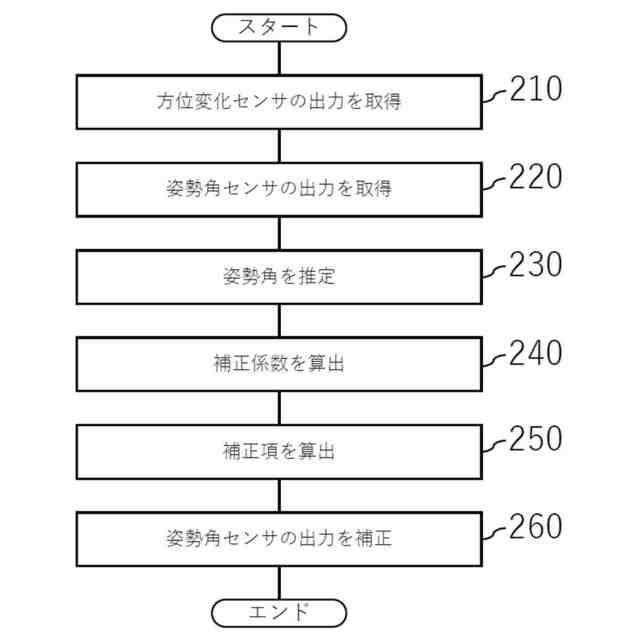
【選択図】図5
特許請求の範囲
【請求項1】
コンピュータが、
姿勢角センサの出力に応じた車両の水平面に対する姿勢角に基づいて、前記車両の水平面における方位変化を検出するための方位変化センサの出力を補正する補正係数を算出することと、
前記姿勢角の変化に基づいて、前記方位変化センサの出力を補正する補正項を算出することと、
前記補正係数及び前記補正項を用いて、前記方位変化センサの出力を補正することと、
を有する、演算処理方法。
続きを表示(約 960 文字)
【請求項2】
前記姿勢角は、ピッチ角及びロール角を含み、
前記補正項を算出することは、前記ピッチ角の変化と前記ロール角の正弦との積により前記補正項を算出することを含む、
請求項1に記載の演算処理方法。
【請求項3】
前記補正係数を算出することは、前記ピッチ角の余弦と前記ロール角の余弦との積の逆数により前記補正係数を算出することを含む、
請求項2に記載の演算処理方法。
【請求項4】
前記方位変化センサの出力を補正することは、前記方位変化センサの出力に対して前記補正項を加算して、前記補正係数を乗算することを含む、
請求項3に記載の演算処理方法。
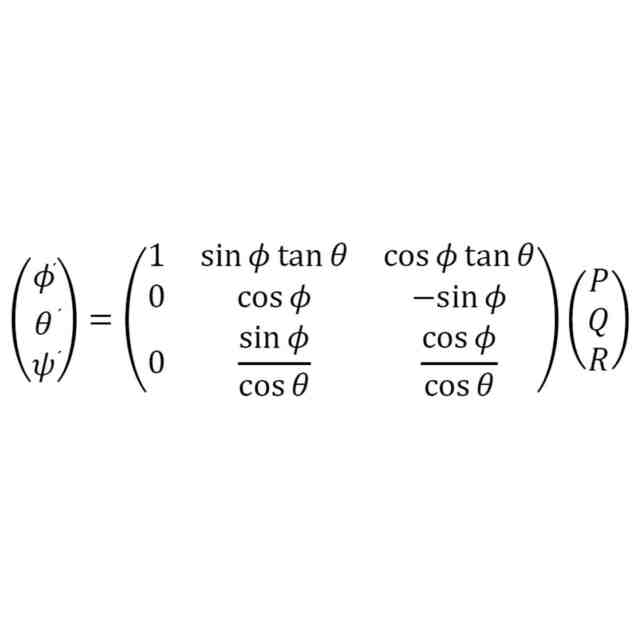
【請求項5】
前記方位変化センサの出力を補正することは、ψ´を単位時間当たりの方位変化、Rを前記方位変化センサの出力、θを前記ピッチ角、θ´を前記単位時間当たりのピッチ角の変化、φを前記ロール角とした場合に、次式により前記方位変化センサの出力を補正することを含む、
JPEG
2025157973000008.jpg
43
112
請求項4に記載の演算処理方法。
【請求項6】
コンピュータに、
姿勢角センサの出力に応じた車両の水平面に対する姿勢角に基づいて、前記車両の水平面における方位変化を検出するための方位変化センサの出力を補正する補正係数を算出する処理と、
前記姿勢角の変化に基づいて、前記方位変化センサの出力を補正する補正項を算出する処理と、
前記補正係数及び前記補正項を用いて、前記方位変化センサの出力を補正する処理と、
を実行させる、演算処理プログラム。
【請求項7】
プロセッサを備え、前記プロセッサが、
姿勢角センサの出力に応じた車両の水平面に対する姿勢角に基づいて、前記車両の水平面における方位変化を検出するための方位変化センサの出力を補正する補正係数を算出し、
前記姿勢角の変化に基づいて、前記方位変化センサの出力を補正する補正項を算出し、
前記補正係数及び前記補正項を用いて、前記方位変化センサの出力を補正する、
演算処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、演算処理方法、演算処理プログラム、及び演算処理装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、「勾配角度すなわち動的変化角度がβ〔°〕である場合、検出軸Xは、水平走行時の検出軸X´に対してβ〔°〕傾斜するので、検出軸Xは、鉛直軸Vに対してα+β〔°〕傾斜することになる。よって、ジャイロセンサ4の出力Jはcos(α+β)倍のJcos(α+β)となる。この場合、このジャイロセンサ4の出力Jcos(α+β)から生成されるジャイロ情報に示される方位変化量もcos(α+β)倍されることになる。一方、上記のとおり、静的補正係数Dsは基本補正係数Dbをcosα倍して演算される。そこで、静的補正係数Dsを(1/cosα)倍して設置角度α〔°〕の影響を除去してからcos(α+β)倍した値を動的補正係数Daとすることにより、ジャイロセンサ4の検出軸X方向の動的変化に応じてジャイロ情報を適切に補正することができる。」と記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2007-155365号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば特許文献1に示される従来の技術では、補正係数を乗算することによりジャイロ情報を補正している。しかしながら、補正係数のみを用いて補正する場合、方位変化量の演算に誤差が生じてしまう場合があった。
【0005】
本開示は、上記の点に鑑みてなされたものであり、補正係数のみを用いて方位変化センサの出力を補正する場合と比較して、誤差を低減することができる方法、プログラム、及び装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1態様の演算処理方法は、コンピュータが、姿勢角センサの出力に応じた車両の水平面に対する姿勢角に基づいて、前記車両の水平面における方位変化を検出するための方位変化センサの出力を補正する補正係数を算出することと、前記姿勢角の変化に基づいて、前記方位変化センサの出力を補正する補正項を算出することと、前記補正係数及び前記補正項を用いて、前記方位変化センサの出力を補正することと、を有する。
【0007】
第1態様の演算処理方法では、方位変化センサの出力を補正演算するにあたって補正係数のみでは不足する場合であっても、補正係数に加えて補正項をも加味して方位変化センサの出力を補正する。これにより、第1態様の演算処理方法によれば、補正係数のみを用いて方位変化センサの出力を補正する場合と比較して、誤差をより低減することができる方法を提供することができる。そのため、第1態様の演算処理方法によれば、推測航法による車両の現在位置をより精度よく検出することにも資する方法を提供することができる。
【0008】
第2態様の演算処理方法は、第1態様の演算処理方法において、前記姿勢角は、ピッチ角及びロール角を含み、前記補正項を算出することは、前記ピッチ角の変化と前記ロール角の正弦との積により前記補正項を算出することを含む。
【0009】
第2態様の演算処理方法では、姿勢角の変動をロール方向とピッチ方向の2軸で捉え、ピッチ角の変化とロール角の正弦との積により補正項を算出する。これにより、第2態様の演算処理方法によれば、ロール方向の傾きがある状態でピッチ方向の傾きが変化する場合であっても誤差の発生を低減することができる。
【0010】
第3態様の演算処理方法は、第2態様の演算処理方法において、前記補正係数を算出することは、前記ピッチ角の余弦と前記ロール角の余弦との積の逆数により前記補正係数を算出することを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
15日前
個人
高精度同時多点測定装置
7日前
個人
アクセサリー型テスター
8日前
ユニパルス株式会社
ロードセル
14日前
アズビル株式会社
電磁流量計
1日前
株式会社ヨコオ
ソケット
14日前
ダイキン工業株式会社
監視装置
12日前
株式会社ヨコオ
ソケット
13日前
トヨタ自動車株式会社
監視装置
13日前
株式会社チノー
放射光測温装置
14日前
ローム株式会社
半導体装置
6日前
個人
システム、装置及び実験方法
1日前
ローム株式会社
半導体装置
6日前
TDK株式会社
ガスセンサ
14日前
TDK株式会社
磁気センサ
13日前
長崎県
形状計測方法
8日前
株式会社デンソー
電流センサ
6日前
日本特殊陶業株式会社
センサ
12日前
多摩川精機株式会社
冗長エンコーダ
13日前
TDK株式会社
電磁波センサ
14日前
三恵技研工業株式会社
融雪レドーム
13日前
日本特殊陶業株式会社
センサ
12日前
日本特殊陶業株式会社
センサ
12日前
中国電力株式会社
電柱管理システム
12日前
日本特殊陶業株式会社
センサ
12日前
ダイハツ工業株式会社
移動支援装置
13日前
トヨタ自動車株式会社
測定システム
5日前
日本特殊陶業株式会社
センサ
12日前
日鉄テックスエンジ株式会社
聴音装置
14日前
コイト電工株式会社
座席濡れ検知装置
12日前
株式会社トプコン
測定装置
13日前
大阪瓦斯株式会社
探査装置
13日前
株式会社トプコン
測定装置
13日前
株式会社不二越
X線測定システム
6日前
住鉱潤滑剤株式会社
液体導電率測定装置
12日前
株式会社トプコン
測定装置
12日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ