TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154711
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057866
出願日
2024-03-29
発明の名称
情報処理装置及びMaaS提供方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B64F
5/40 20170101AFI20251002BHJP(航空機;飛行;宇宙工学)
要約
【課題】eVTOLの整備を効率的に実施する技術を提供する。
【解決手段】情報処理装置10は、eVTOLの新規機体の組立ラインを制御する制御部11を備える情報処理装置であって、制御部11は、整備を行う対象機体の情報を取得すると、新規機体の組立作業及び対象機体の整備作業の両方を組立ラインで実施するように、組立ラインを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
eVTOLの新規機体の組立ラインを制御する制御部を備える情報処理装置であって、
前記制御部は、
整備を行う対象機体の情報を取得すると、新規機体の組立作業及び前記対象機体の整備作業の両方を前記組立ラインで実施するように、前記組立ラインを制御する、
情報処理装置。
続きを表示(約 760 文字)
【請求項2】
請求項1に記載の情報処理装置であって、
前記制御部は、新規機体のみを前記組立ラインで搬送して前記組立作業のみを実施する第1期間と、新規機体及び前記対象機体の両方を前記組立ラインで搬送して前記組立作業及び前記整備作業の両方を実施する第2期間とで、前記組立ラインの搬送速度を変化させないように、前記組立ラインを制御する、情報処理装置。
【請求項3】
請求項1又は2に記載の情報処理装置であって、
新規機体の前記組立作業は、複数の組立工程に分割されており、
前記組立ラインは、前記複数の組立工程がそれぞれ割り当てられた複数の作業区間を有しており、
前記制御部は、
前記対象機体の前記情報に基づいて、前記整備作業の全体の所要時間を算出し、
各整備工程の所要時間が所定の閾値を超えないように前記整備作業を2以上の整備工程に分割し、
前記2以上の整備工程を2以上の作業区間に割り当てる、情報処理装置。
【請求項4】
請求項3に記載の情報処理装置であって、
前記複数の組立工程それぞれの所要時間を示す情報を記憶する記憶部を更に備え、
前記所定の閾値は、前記複数の組立工程それぞれの所要時間の最大値である、情報処理装置。
【請求項5】
請求項3に記載の情報処理装置であって、
前記制御部は、前記整備に関する資格の有無を作業者ごとに示す作業者情報をさらに取得し、
前記作業者情報に基づいて、作業者を前記2以上の作業区間のそれぞれに割り当てる、情報処理装置。
【請求項6】
請求項1に記載の情報処理装置を用いたMaaS(Mobility as a Service)提供方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置及びMaaS提供方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、航空機の整備を支援することが知られている。例えば特許文献1には、航空機の累計飛行時間又はエンジンの累計駆動時間に基づいて、航空機の部品の交換時期を特定し、当該部品の発注時期を決定する運航支援システムについて開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-066358号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
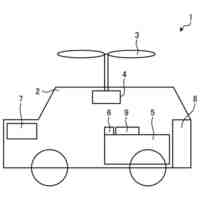
航空機と比較して、eVTOLは、運用される機体数が多い。eVTOLは、electric Vertical Take Off and Landingの略称である。eVTOLは、一度の飛行における飛行時間が短く、飛行回数が多いため、機体の整備を行う頻度が高くなる可能性がある。このため、eVTOLの整備を効率的に実施する技術が望まれている。
【課題を解決するための手段】
【0005】
本開示に係る情報処理装置は、eVTOLの新規機体の組立ラインを制御する制御部を備える情報処理装置であって、前記制御部は、整備を行う対象機体の情報を取得すると、新規機体の組立作業及び前記対象機体の整備作業の両方を前記組立ラインで実施するように、前記組立ラインを制御する。
【発明の効果】
【0006】
本開示によれば、eVTOLの整備を効率的に実施する技術を提供することが可能となる。
【図面の簡単な説明】
【0007】
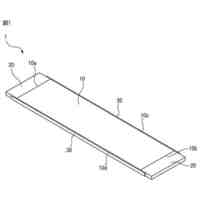
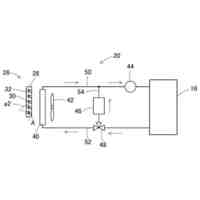
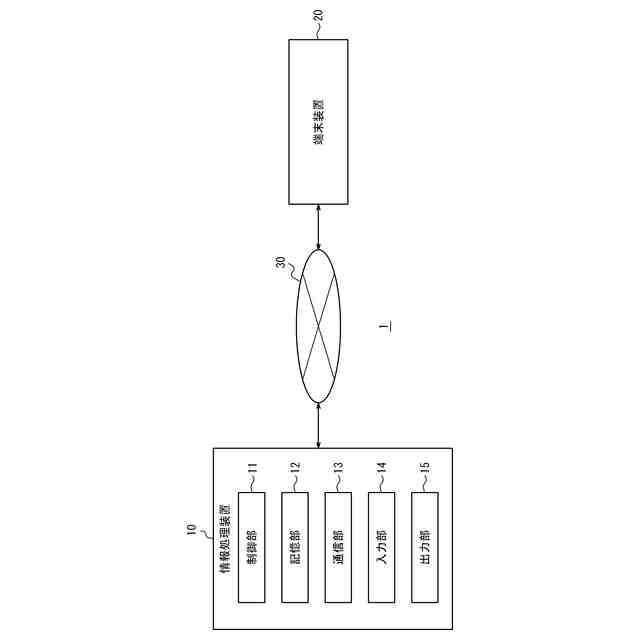
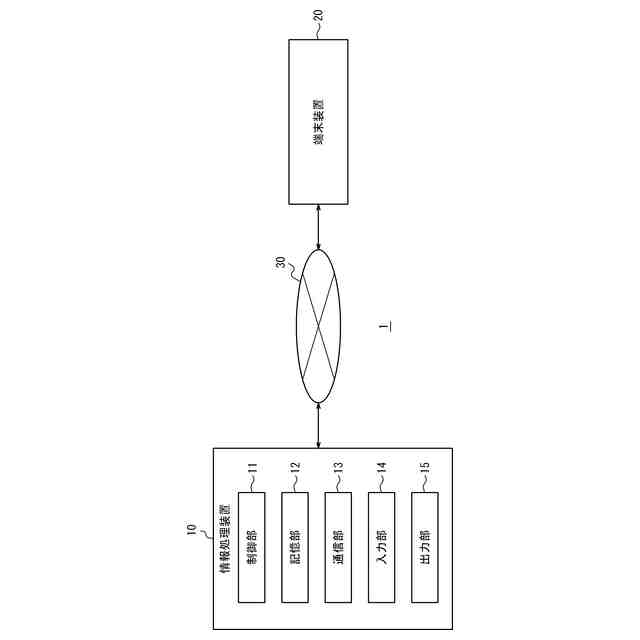
本実施形態に係るシステムの概略構成を示す図である。
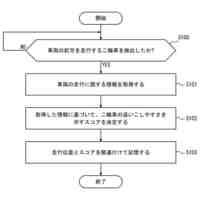
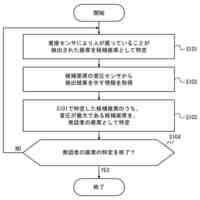
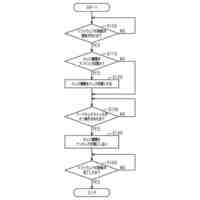
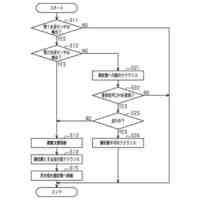
本実施形態に係るシステムの動作を示すフローチャートである。
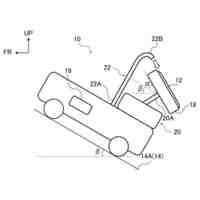
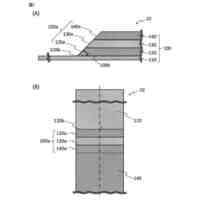
本実施形態に係る、第1期間における作業区間を説明するための図である。
本実施形態に係る、第2期間における作業区間を説明するための図である。
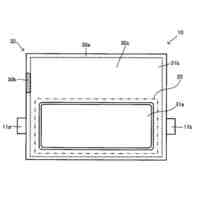
本実施形態に係る、第2期間において組立ラインを搬送される新規機体と整備の対象機体とを説明するための図である。
【発明を実施するための形態】
【0008】
以下、本開示の一実施形態について、図面を参照して説明する。各図面中、同一又は相当する部分には、同一符号を付している。本実施形態の説明において、同一又は相当する部分については、説明を適宜省略又は簡略化する。
【0009】
図1を参照して、本実施形態に係るシステム1の構成を説明する。システム1は、情報処理装置10と、端末装置20とを備える。情報処理装置10は、ネットワーク30を介して、端末装置20と通信可能である。図1において、1台の端末装置20のみが図示されているが、システム1が備える端末装置20の数はこれに限定されない。
【0010】
情報処理装置10は、データセンター等の施設に設置されたコンピュータである。情報処理装置10は、例えば、クラウドコンピューティングシステム又はその他のコンピューティングシステムに属するサーバである。情報処理装置10は、組立ラインを管理する管理者によって使用されてよい。組立ラインは、例えば生産工場の屋内又は屋外に設けられる。組立ラインでは、eVTOLの新規機体の組立作業が実施される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
椅子
1か月前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車体
11日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
方法
26日前
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電池
24日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
方法
24日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
方法
11日前
トヨタ自動車株式会社
車両
24日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
車体
27日前
トヨタ自動車株式会社
方法
25日前
トヨタ自動車株式会社
方法
25日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
治具
19日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
正極層
24日前
トヨタ自動車株式会社
電動機
24日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
モータ
26日前
トヨタ自動車株式会社
電磁弁
1か月前
トヨタ自動車株式会社
モータ
21日前
トヨタ自動車株式会社
固定子
1か月前
トヨタ自動車株式会社
飛行体
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ