TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153116
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055420
出願日
2024-03-29
発明の名称
物理量センサー及び慣性計測装置
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01P
15/125 20060101AFI20251002BHJP(測定;試験)
要約
【課題】他軸感度を抑制し、検出精度をより高くできる物理量センサー等の提供。
【解決手段】本実施形態は、面内方向であり、互いに直交する第1方向DR1及び第2方向DR2の物理量を検出する物理量センサー1に関係する。物理量センサー1は、基板10と、第1固定電極支持部113と、第1固定電極部110と、第1可動電極部210と、第2固定電極支持部123と、第2可動電極部220と、第1可動電極支持部313と、を含む。第1可動電極支持部313は、可動電極固定部301において基板10に固定され、第1方向DR1及び第2方向DR2と交差する第1交差方向DR11に延在し、第1ばね317を介して第1可動電極部210及び第2可動電極部220を支持する。
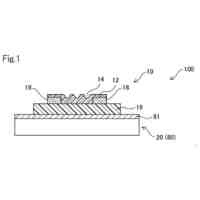
【選択図】 図1
特許請求の範囲
【請求項1】
面内方向であり、互いに直交する第1方向及び第2方向の物理量を検出する物理量センサーにおいて、
基板と、
第1固定電極固定部において前記基板に固定され、前記第1方向に延在する第1固定電極支持部と、
前記第1固定電極支持部から前記第2方向及び前記第2方向の反対方向である第4方向に延在する第1固定電極を有する第1固定電極部と、
前記第2方向及び前記第4方向に延在するとともに前記第1固定電極と対する第1可動電極を有する第1可動電極部と、
第2固定電極固定部において前記基板に固定され、前記第2方向に延在する第2固定電極支持部と、
前記第2固定電極支持部から前記第1方向及び前記第1方向の反対方向である第3方向に延在する第2固定電極を有する第2固定電極部と、
前記第1方向及び前記第3方向に延在するとともに前記第2固定電極と対する第2可動電極を有する第2可動電極部と、
可動電極固定部において前記基板に固定され、前記第1方向及び前記第2方向と交差する第1交差方向に延在し、第1ばねを介して前記第1可動電極部及び前記第2可動電極部を支持する第1可動電極支持部と、
を含むことを特徴とする物理量センサー。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載された物理量センサーにおいて、
前記第1ばねを介して前記第1可動電極支持部に支持される可動体を含み、
前記可動体は、
前記第2方向に延び、前記第1可動電極部を有する第1連結部と、
前記第1方向に延び、前記第2可動電極部を有する第2連結部と、
を含むことを特徴とする物理量センサー。
【請求項3】
請求項2に記載された物理量センサーにおいて、
前記第1ばねは、前記第1連結部と前記第2連結部が交わる前記可動体の角部に設けられ、
前記第1可動電極支持部は、前記可動電極固定部から前記角部へ向かう前記第1交差方向に延在することを特徴とする物理量センサー。
【請求項4】
請求項1に記載された物理量センサーにおいて、
前記第1固定電極支持部の長さと前記第2固定電極支持部の長さは、略同じであることを特徴とする物理量センサー。
【請求項5】
請求項2に記載された物理量センサーにおいて、
前記第1連結部の長さと前記第2連結部の長さは、略同じであることを特徴とする物理量センサー。
【請求項6】
請求項1に記載された物理量センサーにおいて、
前記第1方向と前記第1交差方向の成す角度と、前記第2方向と前記第1交差方向の成す角度とは、略同じであることを特徴とする物理量センサー。
【請求項7】
請求項1に記載された物理量センサーにおいて、
前記第1可動電極支持部の長さは、前記第1交差方向における前記第1ばねの長さより長いことを特徴とする物理量センサー。
【請求項8】
請求項1に記載された物理量センサーにおいて、
前記第1可動電極支持部の長さは、前記第1固定電極支持部の長さ及び前記第2固定電極支持部の長さより長いことを特徴とする物理量センサー。
【請求項9】
請求項1に記載された物理量センサーにおいて、
前記第1固定電極部は、第1の第1固定電極と、前記第1の第1固定電極より前記第1方向に設けられる第2の第1固定電極とを有し、
前記第2方向において、前記第2の第1固定電極の長さは、前記第1の第1固定電極の長さより長いことを特徴とする物理量センサー。
【請求項10】
請求項1に記載された物理量センサーにおいて、
前記第1固定電極支持部は、前記第1方向において互いに平行に延びる第1の第1固定電極支持部及び第2の第1固定電極支持部を含むことを特徴とする物理量センサー。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、物理量センサー及び慣性計測装置等に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
可動体に含まれる可動電極部と、固定電極部とのギャップを変化させ、静電容量の変化量に基づいて加速度等の物理量を検出する物理量センサーが知られている。特許文献1には、可動体を接続する基板の面に平行な方向に可動体を揺動させることで、基板の面に対応する2軸の物理量を検出する手法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-125842号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
2軸の物理量を検出する物理量センサーにおいて、一方の軸の物理量を検出する検出ユニットにて、他方の軸の物理量を検出してしまう事象(他軸感度という)が発生することがあり、検出精度が悪化する。そのため、検出精度をより向上させる物理量センサーの構築が望まれる。
【課題を解決するための手段】
【0005】
本開示の一態様は、面内方向であり、互いに直交する第1方向及び第2方向の物理量を検出する物理量センサーにおいて、基板と、第1固定電極固定部において前記基板に固定され、前記第1方向に延在する第1固定電極支持部と、前記第1固定電極支持部から前記第2方向及び前記第2方向の反対方向である第4方向に延在する第1固定電極を有する第1固定電極部と、前記第2方向及び前記第4方向に延在するとともに前記第1固定電極と対する第1可動電極を有する第1可動電極部と、第2固定電極固定部において前記基板に固定され、前記第2方向に延在する第2固定電極支持部と、前記第2固定電極支持部から前記第1方向及び前記第1方向の反対方向である第3方向に延在する第2固定電極を有する第2固定電極部と、前記第1方向及び前記第3方向に延在するとともに前記第2固定電極と対する第2可動電極を有する第2可動電極部と、可動電極固定部において前記基板に固定され、前記第1方向及び前記第2方向と交差する第1交差方向に延在し、第1ばねを介して前記第1可動電極部及び前記第2可動電極部を支持する第1可動電極支持部と、を含む物理量センサーに関係する。
【0006】
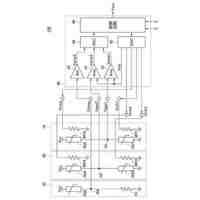
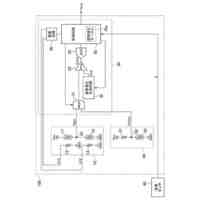
本開示の他の態様は、上記に記載された物理量センサーと、前記物理量センサーから出力された検出信号に基づいて制御を行う制御部と、を含む慣性計測装置に関係する。
【図面の簡単な説明】
【0007】
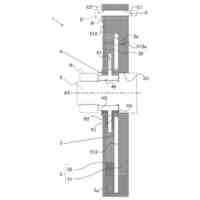
物理量センサーの例を説明する平面図。
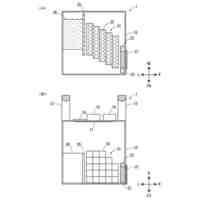
物理量センサーの動作モードの例を説明する図。
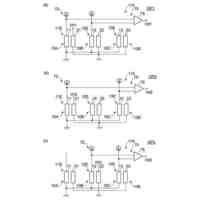
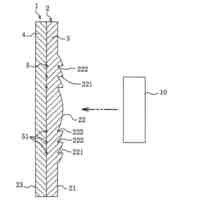
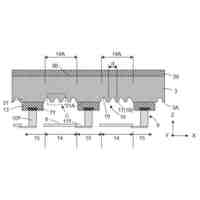
第1~第2固定電極部と第1~第2可動電極部の例を説明する図。
第1可動電極支持部等を説明する図。
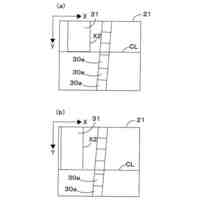
第1固定電極部に設けられる第1固定電極の長さの例について説明する図。
第3~第4固定電極部と第3~第4可動電極部の例を説明する図。
第2~第3可動電極支持部の例を説明する図。
第4可動電極支持部の例を説明する図。
第1固定電極部及び第1可動電極部の別の例を説明する図。
第1固定電極部及び第1可動電極部の別の例を説明する図。
第1固定電極部及び第1可動電極部の別の例を説明する図。
第1固定電極部及び第1可動電極部の別の例を説明する図。
第3固定電極部及び第3可動電極部の別の例を説明する図。
物理量センサーの別の例を説明する平面図。
物理量センサーの別の例を説明する平面図。
物理量センサーの別の例を説明する平面図。
物理量センサーの別の例を説明する平面図。
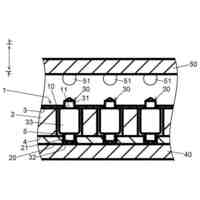
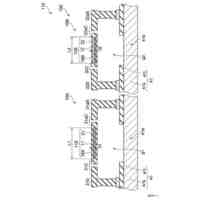
図17のE-E断面を説明する図。
物理量センサーの別の例を説明する平面図。
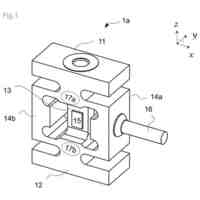
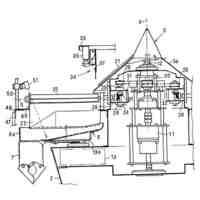
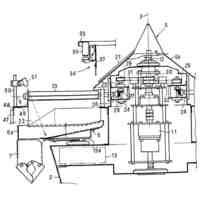
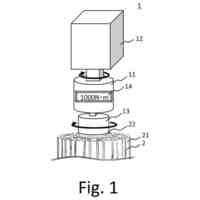
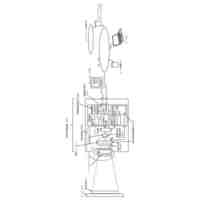
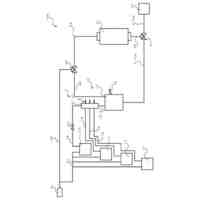
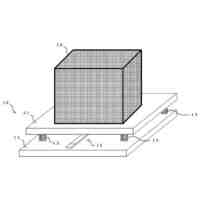
物理量センサーを含む慣性計測装置の概略構成を示す分解斜視図。
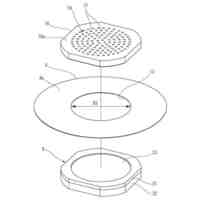
物理量センサーの回路基板の斜視図。
【発明を実施するための形態】
【0008】
以下、本開示の好適な実施形態について詳細に説明する。なお以下に説明する本実施形態は特許請求の範囲に記載された内容を不当に限定するものではなく、本実施形態で説明される構成の全てが必須構成要件であるとは限らない。
【0009】
本実施形態の物理量センサー1の構成例について説明する。図1は、本実施形態の物理量センサー1の例を、基板10に直交する方向での平面視における平面図を概略的に示したものである。本実施形態において説明の便宜上、互いに直交する2つの軸として、X軸及びY軸を、図1に図示している。なお、X軸及びY軸に直交するZ軸の図示は省略する。互いに直交する方向を第1方向DR1、第2方向DR2とし、第1方向DR1、第2方向DR2は、各々、例えば+X軸方向、+Y軸方向に対応する。また、本実施形態において、第1方向DR1の反対側の方向を第3方向DR3とし、第2方向DR2の反対側の方向を第4方向DR4とする。つまり、図1において第3方向DR3は、例えば-X軸方向であり、第4方向DR4は、例えば-Y軸方向である。なお、「直交」とは90°で交わっているものの他、90°から若干傾いた角度で交わっている場合も含むものとする。また、以降において、+方向と-方向を厳密に区別する必要が無い場合は「X軸に沿った方向」を「第1方向DR1に沿った方向」と代表して表記し、「Y軸に沿った方向」を「第2方向DR2に沿った方向」と代表して表記することがある。なお、上記した第1方向DR1及び第2方向DR2とXY軸との対応関係はあくまでも例示であり、上記に限定されるものではない。以降の説明は、例えば第1方向DR1をY軸として本実施形態の手法を適用することを妨げるものではない。
【0010】
図1の物理量センサー1において、基板10に枠状の可動体MBが接続されている。なお、図1の平面視において可動体MBは1つの閉じたループを形成するように図示しているが、本実施形態においては、例えば一部が開口していても枠状として扱えるものとし、詳細は図11等で後述する。また、基板10または可動体MBに接続する他の構成については、図3、図4、図6、図7、図8に分けて後述する。より具体的には、図1のA1の点線枠に示す構成は、後述する図3のA11に示す構成に対応し、図1のA2の点線枠に示す構成は、後述する図3のA12に示す構成に対応し、図1のB1の点線枠に示す構成は、後述する図4のB11に示す構成に対応する。また、図1のA3の点線枠に示す構成は、後述する図6のA13に示す構成に対応し、図1のA4の点線枠に示す構成は、後述する図6のA14に示す構成に対応する。また、図1のB2の点線枠に示す構成は、後述する図7のB12に示す構成に対応し、図1のB3の点線枠に示す構成は、後述する図7のB13に示す構成に対応し、図1のB4の点線枠に示す構成は、後述する図8のB14に示す構成に対応する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
4日前
日本精機株式会社
位置検出装置
10日前
ユニパルス株式会社
ロードセル
3日前
日本精機株式会社
位置検出装置
10日前
日本精機株式会社
位置検出装置
10日前
大和製衡株式会社
組合せ秤
15日前
大和製衡株式会社
組合せ秤
15日前
アズビル株式会社
圧力センサ
9日前
トヨタ自動車株式会社
監視装置
2日前
株式会社ヨコオ
ソケット
3日前
トヨタ自動車株式会社
検査装置
12日前
ダイキン工業株式会社
監視装置
1日前
株式会社東芝
センサ
15日前
エイブリック株式会社
磁気センサ回路
9日前
株式会社チノー
放射光測温装置
3日前
株式会社ヨコオ
ソケット
2日前
株式会社ユーシン
操作検出装置
12日前
株式会社東芝
センサ
15日前
東レエンジニアリング株式会社
計量装置
12日前
TDK株式会社
磁気センサ
2日前
TDK株式会社
ガスセンサ
8日前
TDK株式会社
ガスセンサ
3日前
TDK株式会社
ガスセンサ
9日前
株式会社東芝
重量測定装置
8日前
富士電機株式会社
エンコーダ
9日前
中国電力株式会社
電柱管理システム
1日前
日本特殊陶業株式会社
センサ
1日前
日本特殊陶業株式会社
センサ
1日前
三恵技研工業株式会社
融雪レドーム
2日前
三菱マテリアル株式会社
温度センサ
4日前
株式会社熊谷組
RI計測装置
10日前
TDK株式会社
電磁波センサ
3日前
ダイハツ工業株式会社
移動支援装置
2日前
日本特殊陶業株式会社
センサ
1日前
日本特殊陶業株式会社
センサ
1日前
日本特殊陶業株式会社
センサ
1日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ