TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025149611
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024050361
出願日
2024-03-26
発明の名称
走行制御装置、自律走行装置、走行制御方法、走行制御プログラム
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
個人
,
個人
主分類
B60W
50/029 20120101AFI20251001BHJP(車両一般)
要約
【課題】車輪に異常が発生した場合における路面との離隔タイミングを調整可能な走行制御装置等を提供する。
【解決手段】走行制御装置は、プロセッサを有し、路面への接地状態と路面からの離隔状態とを切替可能な複数の車輪が設けられた自律走行装置の、自律走行を制御する。プロセッサは、自律走行中における各車輪について異常を検知することを実行するように構成される。プロセッサは、異常が検知された車輪について、自律走行中の接地状態と離隔状態とを、異常の検知態様に応じた切替パターンにて切替制御することを実行するように構成される。
【選択図】図6
特許請求の範囲
【請求項1】
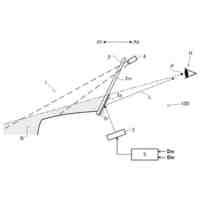
プロセッサ(19b)を有し、路面への接地状態と前記路面からの離隔状態とを切替可能な複数の車輪(176)が設けられた自律走行装置(1)の、自律走行を制御する走行制御装置であって、
前記プロセッサは、
自律走行中における各前記車輪について異常を検知することと、
前記異常が検知された前記車輪について、自律走行中の前記接地状態と前記離隔状態とを、前記異常の検知態様に応じた切替パターンにて切替制御することと、
を実行するように構成される走行制御装置。
続きを表示(約 1,100 文字)
【請求項2】
切替制御することは、
前記車輪の回転周期に応じた周期的な前記異常の検知に対して、前記異常の検知タイミングを含む検知期間における前記離隔状態と、前記検知期間以外の非検知期間における前記接地状態と、を前記回転周期内で切り替える前記切替パターンにて切替制御することを含む請求項1に記載の走行制御装置。
【請求項3】
切替制御することは、
前記車輪における内圧の減少としての前記異常の検知に対して、前記内圧の許容範囲内における前記接地状態と、前記内圧が前記許容範囲の低圧側に外れた場合における前記離隔状態と、を切り替える前記切替パターンにて切替制御することを含む請求項1に記載の走行制御装置。
【請求項4】
切替制御することは、
前記内圧の前記許容範囲内において、前記内圧の減少に応じた前記車輪の前記路面に対する接地圧の減少制御を実行することを含む請求項3に記載の走行制御装置。
【請求項5】
切替制御することは、
前記異常が検知されていない前記車輪で、且つ前記自律走行装置の重心に関連する重心条件の成立する前記車輪について、前記異常の発生した前記車輪に連動して切替制御することを含む請求項1に記載の走行制御装置。
【請求項6】
切替制御することは、
前記異常の検知された前記車輪が複数存在する場合に、前記検知態様に応じた前記切替パターンにより切替制御する前記車輪と、前記接地状態を禁止して前記離隔状態を維持する前記車輪と、を設定することを含む請求項1に記載の走行制御装置。
【請求項7】
切替制御することは、
前記異常の発生リスクが予測されるリスク領域において、前記リスク領域への接地が予測される前記車輪について前記接地状態から前記離隔状態への切替制御を実行することを含む請求項1に記載の走行制御装置。
【請求項8】
前記プロセッサは、
接地圧を軽減する軽減条件が成立する前記車輪から重心を遠ざける重心制御を実行する請求項1に記載の走行制御装置。
【請求項9】
前記離隔状態の前記車輪に対して前記接地状態へと切り替える接地条件が成立する場合に、前記切替パターンをキャンセルして前記接地状態へと切り替えることを含む請求項1に記載の走行制御装置。
【請求項10】
前記プロセッサは
前記切替パターンに応じて走行予定経路を変更することを実行するように構成される請求項1に記載の走行制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律走行装置の自律走行を制御する走行制御技術に、関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、自律走行機能を有する荷物搬送ロボットが開示されている。荷物搬送ロボットは、複数の第一車輪と、複数の第二車輪とを備えている。荷物搬送ロボットは、第一エリアから第二エリアへの進入において、第一エリアの走行路に汚れが検出された場合、車輪の清浄化動作を実行する。清浄化動作において、荷物搬送ロボットは、第一エリアの走行中において路面に接触していた複数の第一車輪を路面から離れさせ、第一エリアの走行中において路面から離れていた複数の第二車輪を路面に接触させる動作を実行する。
【先行技術文献】
【特許文献】
【0003】
特表2022-506031号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自律走行装置の走行中において路面に接触していた車輪を、異常が発生した場合に単に路面から離れさせた場合、路面に接触する車輪が減少することで走行継続が困難になる虞がある。一方で、異常が発生した車輪の路面への接触状態を維持した場合にも、走行継続が困難になる虞がある。特許文献1には、車輪に異常が発生した場合における路面との離隔タイミングに関して改良の余地がある。
【0005】
本開示の課題は、車輪に異常が発生した場合における路面との離隔タイミングを調整可能な走行制御装置を、提供することにある。本開示の別の課題は、車輪に異常が発生した場合に走行継続可能な自律走行装置を、提供することにある。本開示の又別の課題は、車輪に異常が発生した場合に走行継続可能な走行制御方法を、提供することにある。本開示のさらに別の課題は、車輪に異常が発生した場合に走行継続可能な走行制御プログラムを、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
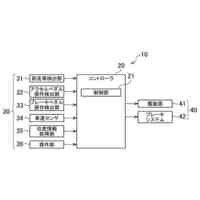
本開示の第一態様は、プロセッサ(19b)を有し、路面への接地状態と路面からの離隔状態とを切替可能な複数の車輪(176)が設けられた自律走行装置(1)の、自律走行を制御する走行制御装置であって、
プロセッサは、
自律走行中における各車輪について異常を検知することと、
異常が検知された車輪について、自律走行中の接地状態と離隔状態とを、異常の検知態様に応じた切替パターンにて切替制御することと、
を実行するように構成される。
【0008】
本開示の第二態様は、自律走行可能な自律走行装置であって、
路面への接地状態と路面からの離隔状態とを切替可能な複数の車輪(176)と、
プロセッサ(19b)を有して自律走行を制御する走行制御装置(19)と、
を備え、
プロセッサは、
自律走行中における各車輪について異常を検知することと、
異常が検知された車輪について、接地状態と離隔状態とを、異常の検知態様に応じた切替パターンにて切替制御することと、
を実行するように構成される。
【0009】
本開示の第三態様は、路面への接地状態と路面からの離隔状態とを切替可能な複数の車輪(176)が設けられた自律走行装置(1)の、自律走行を制御するために、プロセッサ(19b)により実行される走行制御方法であって、
自律走行中における各車輪について異常を検知することと、
異常が検知された車輪について、自律走行中の接地状態と離隔状態とを、異常の検知態様に応じた切替パターンにて切替制御することと、
を含む。
【0010】
本開示の第四態様は、記憶媒体(19a)に記憶され、路面への接地状態と路面からの離隔状態とを切替可能な複数の車輪(176)が設けられた自律走行装置(1)の自律走行を制御するプロセッサ(19b)に、実行させるための命令を含む走行制御プログラムであって、
命令は、
自律走行中における各車輪について異常を検知させることと、
異常が検知された車輪について、自律走行中の接地状態と離隔状態とを、異常の検知態様に応じた切替パターンにて切替制御させることと、
を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
前輪キャスター
1か月前
個人
上部一体型自動車
12日前
個人
タイヤ脱落防止構造
1か月前
個人
ルーフ付きトライク
2か月前
個人
マスタシリンダ
19日前
日本精機株式会社
表示装置
1か月前
株式会社ニフコ
収納装置
1か月前
株式会社ニフコ
照明装置
1か月前
日本精機株式会社
車載表示装置
27日前
日本精機株式会社
車室演出装置
1か月前
日本精機株式会社
画像投映装置
8日前
日本精機株式会社
車両用投射装置
13日前
株式会社SUBARU
車両
6日前
日本精機株式会社
車両用表示装置
8日前
井関農機株式会社
作業車両
26日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用投影装置
26日前
日本化薬株式会社
ガス発生器
28日前
ダイハツ工業株式会社
変速機
1か月前
日本化薬株式会社
ガス発生器
8日前
日本化薬株式会社
ガス発生器
1か月前
日産自動車株式会社
伝動部材
13日前
スズキ株式会社
運転支援装置
1か月前
個人
段差通過を容易にする車輪構造
1か月前
個人
自動車の非常ブレーキアシスト
1か月前
ダイハツ工業株式会社
変速機
1か月前
ダイハツ工業株式会社
変速機
1か月前
帝人株式会社
衝撃吸収構造体
1か月前
ダイハツ工業株式会社
変速機
1か月前
エムケー精工株式会社
車両処理装置
16日前
日本化薬株式会社
ガス発生器
6日前
エムケー精工株式会社
車両処理装置
1か月前
トヨタ紡織株式会社
車両
1か月前
株式会社アイシン
空気袋
16日前
トヨタ自動車株式会社
電動車両
1か月前
株式会社小糸製作所
車両用灯具
13日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ