TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147524
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047807
出願日
2024-03-25
発明の名称
情報処理装置及び情報処理方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
G08G
1/00 20060101AFI20250930BHJP(信号)
要約
【課題】車両のユーザが適切な運転行動をしているか否かを把握することを目的とする。
【解決手段】情報処理装置の制御部は、車両の走行方向の先の交差点に設けられた一時停止標識の位置を取得する。情報処理装置の制御部は、第1範囲内で車両が一時停止をしたか否かを運転の第1評価として判定する。また、制御部は、走行方向において、第1範囲の先の第2範囲内で車両が所定の速度以下で走行を行ったか否かを運転の第2評価として判定する。そして、制御部は、第1評価及び第2評価の結果を出力する。ここで、第1範囲及び第2範囲は、取得された一時停止標識の位置に応じて設定される。
【選択図】図6
特許請求の範囲
【請求項1】
制御部を備える情報処理装置であって、
前記制御部は、
車両の走行方向の先の交差点に設けられた一時停止標識の位置を取得することと、
第1範囲内で前記車両が一時停止をしたか否かを運転の第1評価として判定することと、
前記走行方向において、前記第1範囲の先の第2範囲内で前記車両が所定の速度以下で走行を行ったか否かを運転の第2評価として判定することと、
前記第1評価及び前記第2評価の結果を出力することと、
を実行するように構成され、
前記第1範囲及び前記第2範囲は、取得された前記一時停止標識の位置に応じて設定される、
情報処理装置。
続きを表示(約 650 文字)
【請求項2】
前記交差点には、横断歩道が設けられており、
前記第1範囲は、前記走行方向において、前記一時停止標識の位置から手前に10メートル及び先へ5メートルの範囲内で設定され、
前記第2範囲は、前記走行方向において、前記一時停止標識の位置から手前に5メートル及び先へ16メートルの範囲内で設定される、
請求項1に記載の情報処理装置。
【請求項3】
前記第1範囲及び前記第2範囲は、前記交差点の規模に応じて設定される、
請求項1に記載の情報処理装置。
【請求項4】
前記一時停止標識の位置を取得することは、前記車両に搭載されたカメラの動画像から前記一時停止標識を検出することを含む、
請求項1から3のいずれか一項に記載の情報処理装置。
【請求項5】
コンピュータが実行する情報処理方法であって、
車両の走行方向の先の交差点に設けられた一時停止標識の位置を取得することと、
第1範囲内で前記車両が一時停止をしたか否かを運転の第1評価として判定することと、
前記走行方向において、前記第1範囲の先の第2範囲内で前記車両が所定の速度以下で走行を行ったか否かを運転の第2評価として判定することと、
前記第1評価及び前記第2評価の結果を出力することと、
を含み、
前記第1範囲及び前記第2範囲は、取得された前記一時停止標識の位置に応じて設定される、
情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置及び情報処理方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、物体認識装置が開示されている。特許文献1に開示されている物体認識装置は、垂直方向及び水平方向の二次元平面上に投影された観測領域に、それぞれ実空間での車両からの距離及び車速に応じた大きさの複数の関心領域を設定する。そして、物体認識装置は、測距センサから観測領域に対応する実空間の照射範囲に対して電磁波を照射させ、受波された電磁波の反射波のデータに基づいて車両の前方の物体を認識する。
【先行技術文献】
【特許文献】
【0003】
特開2022-156024号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、車両のユーザが適切な運転行動をしているか否かを把握することを目的とする。
【課題を解決するための手段】
【0005】
本開示の第1の態様に係る情報処理装置は、
制御部を備える情報処理装置であって、
前記制御部は、
車両の走行方向の先の交差点に設けられた一時停止標識の位置を取得することと、
第1範囲内で前記車両が一時停止をしたか否かを運転の第1評価として判定することと、
前記走行方向において、前記第1範囲の先の第2範囲内で前記車両が所定の速度以下で走行を行ったか否かを運転の第2評価として判定することと、
前記第1評価及び前記第2評価の結果を出力することと、
を実行するように構成され、
前記第1範囲及び前記第2範囲は、取得された前記一時停止標識の位置に応じて設定される。
【0006】
本開示の第2の態様に係る情報処理方法は、
コンピュータが実行する情報処理方法であって、
車両の走行方向の先の交差点に設けられた一時停止標識の位置を取得することと、
第1範囲内で前記車両が一時停止をしたか否かを運転の第1評価として判定することと、
前記走行方向において、前記第1範囲の先の第2範囲内で前記車両が所定の速度以下で走行を行ったか否かを運転の第2評価として判定することと、
前記第1評価及び前記第2評価の結果を出力することと、
を含み、
前記第1範囲及び前記第2範囲は、取得された前記一時停止標識の位置に応じて設定される。
【発明の効果】
【0007】
本開示により、車両のユーザが適切な運転行動をしているか否かを把握することが可能
となる。
【図面の簡単な説明】
【0008】
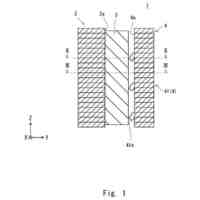
図1は、本実施形態に係る評価システムの概略構成を示す図である。
図2は、一時停止標識の設置位置と、一時停止線の位置との関係を示す図である。
図3は、交差点の一例を示す図である。
図4は、一時停止標識によって特定される範囲を示す図である。
図5は、車載装置の機能構成の一例を概略的に示すブロック図である。
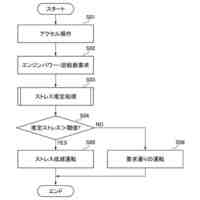
図6は、制御部によって実行される処理のフローチャートである。
【発明を実施するための形態】
【0009】
車両が一時停止標識の設置されている交差点を走行する場合がある。この場合において、車両は一時停止標識に対応する一時停止線で停止しなければならない。また、車両のユーザは、一時停止線で一時停止した後、交差点の入口付近まで車両を増速せずに微速で走行させて安全確認を行うことが推奨される。そのため、車両のユーザが一時停止線で停止した場合、及び交差点の入口付近まで車両を増速せずに微速で走行させて安全の確認を行った場合、該ユーザは、適切な運転行動をしていると判断することができる。
【0010】
そこで、本開示の第1の態様に係る情報処理装置の制御部は、車両の走行方向の先の交差点に設けられた一時停止標識の位置を取得する。情報処理装置の制御部は、第1範囲内で前記車両が一時停止をしたか否かを運転の第1評価として判定する。これにより、車両のユーザが一時停止を適切に行ったか否かを診断することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
サーバ
12日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
回転子
4日前
トヨタ自動車株式会社
電解液
4日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
ロータ
6日前
トヨタ自動車株式会社
電動車
6日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
切断装置
4日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
駆動装置
4日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
電源装置
4日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
検査装置
8日前
トヨタ自動車株式会社
電動車両
18日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
塗布装置
6日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
冷却構造
11日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ