TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025146262
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046938
出願日
2024-03-22
発明の名称
荷役制御装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
B66F
9/07 20060101AFI20250926BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】トータルの荷役時間を短縮することができる荷役制御装置を提供する。
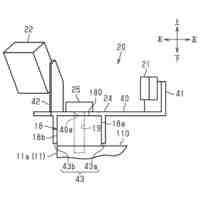
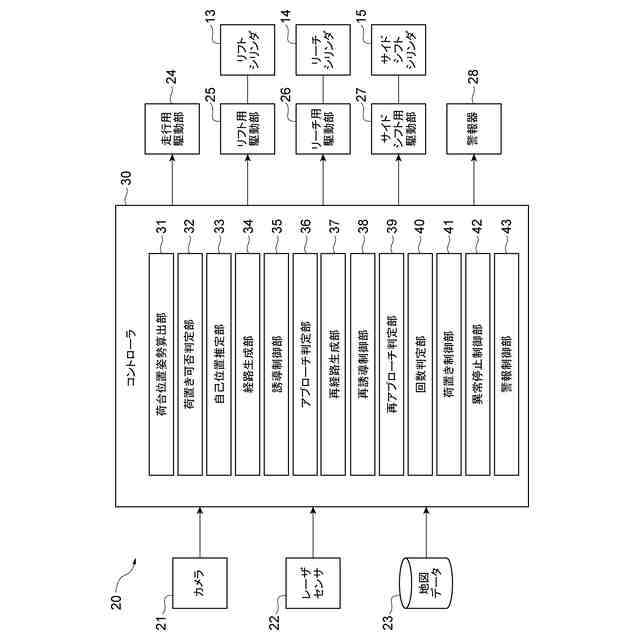
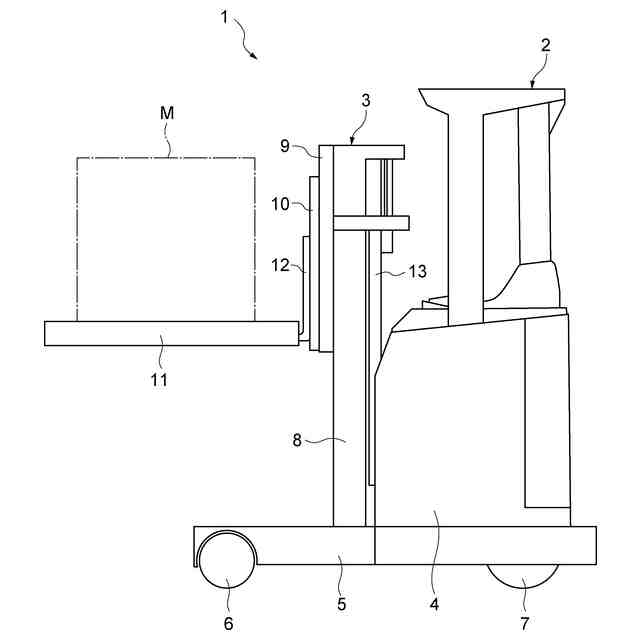
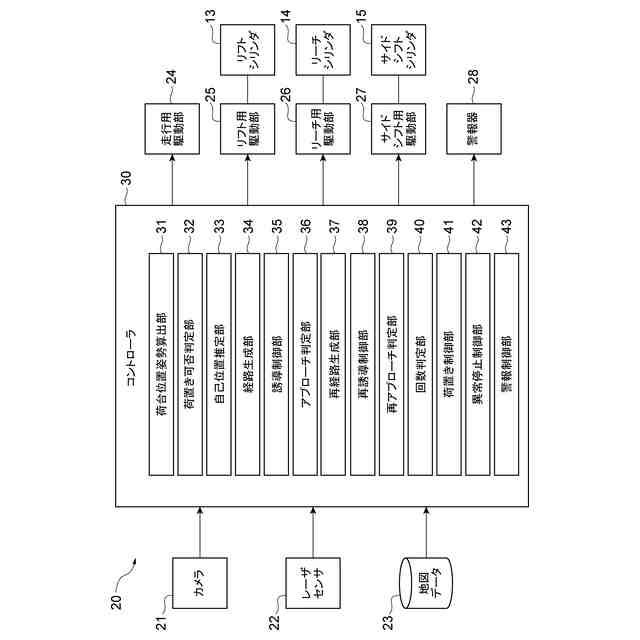
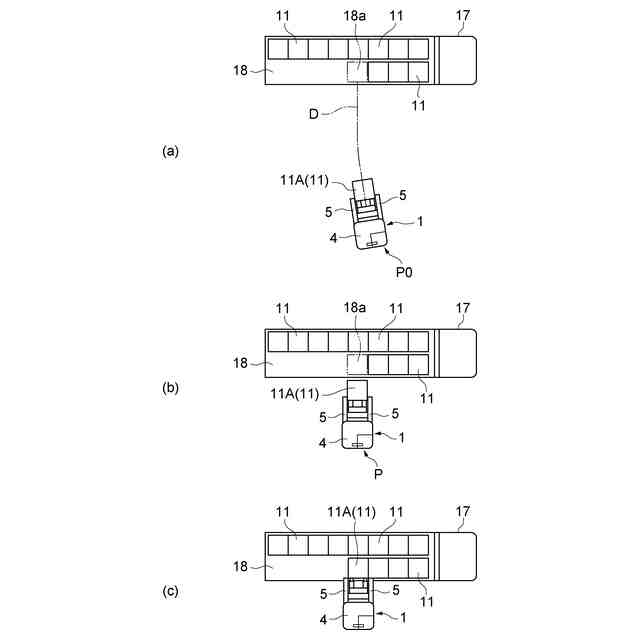
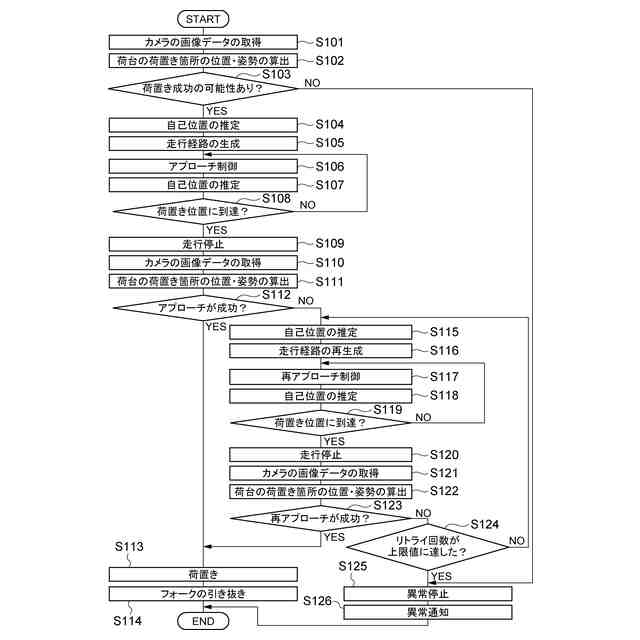
【解決手段】荷役制御装置20は、フォークリフト1を荷置き位置Pに対してアプローチさせるように制御するアプローチ制御部と、フォークリフト1のアプローチが成功したかどうかを判定するアプローチ判定部36と、フォークリフト1のアプローチが成功したと判定された場合に、荷置き箇所18aに対してパレット11の荷置きを行うように制御する荷置き制御部41と、フォークリフト1のアプローチが失敗したと判定された場合に、フォークリフト1を再度アプローチさせるように制御する再アプローチ制御部と、荷置き箇所18aに対するパレット11の荷置きが成功する可能性があるかどうかを判定する荷置き可否判定部32と、パレット11の荷置きが成功する可能性がないと判定された場合に、フォークリフト1の走行を異常停止させるように制御する異常停止制御部42とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
フォークによりパレットを保持したフォークリフトを開始位置から荷置き箇所に向けて移動させて前記パレットの荷置きを行う荷役制御装置であって、
前記荷置き箇所を検知する荷置き箇所検知部と、
前記荷置き箇所検知部の検知データに基づいて、前記フォークリフトに対する前記荷置き箇所の位置及び姿勢を算出する位置姿勢算出部と、
前記フォークリフトが前記開始位置にあるときに前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記フォークリフトを前記荷置き箇所の手前の荷置き位置に対してアプローチさせるように制御するアプローチ制御部と、
前記フォークリフトが前記荷置き位置に達したときに前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記荷置き位置に対する前記フォークリフトのアプローチが成功したかどうかを判定するアプローチ判定部と、
前記アプローチ判定部により前記荷置き位置に対する前記フォークリフトのアプローチが成功したと判定された場合に、前記荷置き箇所に対して前記パレットの荷置きを行うように前記フォークリフトを制御する荷置き制御部と、
前記アプローチ判定部により前記荷置き位置に対する前記フォークリフトのアプローチが失敗したと判定された場合に、前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記フォークリフトを前記荷置き位置に対して再度アプローチさせるように制御する再アプローチ制御部と、
前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記荷置き箇所に対する前記パレットの荷置きが成功する可能性があるかどうかを判定する荷置き可否判定部と、
前記荷置き可否判定部により前記荷置き箇所に対する前記パレットの荷置きが成功する可能性がないと判定された場合に、前記フォークリフトの走行を異常停止させるように前記フォークリフトを制御する異常停止制御部とを備える荷役制御装置。
続きを表示(約 2,400 文字)
【請求項2】
前記荷置き可否判定部は、前記フォークリフトが前記開始位置にあるときに前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記荷置き箇所に対する前記パレットの荷置きが成功する可能性があるかどうかを判定し、
前記アプローチ制御部は、前記荷置き可否判定部により前記荷置き箇所に対する前記パレットの荷置きが成功する可能性があると判定された場合に、前記フォークリフトが前記開始位置にあるときに前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記フォークリフトを前記荷置き位置に対してアプローチさせるように制御する請求項1記載の荷役制御装置。
【請求項3】
前記荷置き可否判定部は、前記荷置き箇所に対する前記フォークリフトのピッチ角が予め決められたピッチ角閾値以下であると共に、前記荷置き箇所に対する前記フォークリフトのロール角が予め決められたロール角閾値以下であるときは、前記荷置き箇所に対する前記パレットの荷置きが成功する可能性があると判定し、前記荷置き箇所に対する前記フォークリフトのピッチ角が前記ピッチ角閾値よりも大きいとき、または前記荷置き箇所に対する前記フォークリフトのロール角が前記ロール角閾値よりも大きいときは、前記荷置き箇所に対する前記パレットの荷置きが成功する可能性がないと判定する請求項1記載の荷役制御装置。
【請求項4】
前記フォークリフトは、前記フォークを前記フォークリフトの左右方向に移動させるサイドシフトシリンダを有し、
前記アプローチ判定部は、前記荷置き箇所に対する前記フォークリフトの横ずれ量が予め決められた規定量以下であると共に、前記荷置き箇所に対する前記フォークリフトのヨー角が予め決められたヨー角閾値以下であるときは、前記荷置き位置に対する前記フォークリフトのアプローチが成功したと判定し、前記荷置き箇所に対する前記フォークリフトの横ずれ量が前記規定量よりも大きいとき、または前記荷置き箇所に対する前記フォークリフトのヨー角が前記ヨー角閾値よりも大きいときは、前記荷置き位置に対する前記フォークリフトのアプローチが失敗したと判定する請求項1記載の荷役制御装置。
【請求項5】
前記フォークリフトが前記荷置き位置に再度達したときに前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記荷置き位置に対する前記フォークリフトの再アプローチが成功したかどうかを判定する再アプローチ判定部を更に備え、
前記再アプローチ制御部は、前記再アプローチ判定部により前記荷置き位置に対する前記フォークリフトの再アプローチが失敗したと判定された場合は、前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記フォークリフトを前記荷置き位置に対して再度アプローチさせるように制御し、
前記荷置き制御部は、前記再アプローチ判定部により前記荷置き位置に対する前記フォークリフトの再アプローチが成功したと判定された場合は、前記荷置き箇所に対して前記パレットの荷置きを行うように前記フォークリフトを制御する請求項1記載の荷役制御装置。
【請求項6】
前記再アプローチ判定部により前記荷置き位置に対する前記フォークリフトの再アプローチが失敗したと判定された場合に、前記荷置き位置に対する前記フォークリフトの再アプローチの回数が予め決められた上限値に達したかどうかを判定する回数判定部を更に備え、
前記異常停止制御部は、前記荷置き可否判定部により前記荷置き箇所に対する前記パレットの荷置きが成功する可能性がないと判定された場合、または前記回数判定部により前記荷置き位置に対する前記フォークリフトの再アプローチの回数が前記上限値に達したと判定された場合に、前記フォークリフトの走行を異常停止させるように前記フォークリフトを制御する請求項5記載の荷役制御装置。
【請求項7】
前記再アプローチ制御部は、前記荷置き位置に対する前記フォークリフトのアプローチが失敗したと判定された場合は、前記フォークリフトが前記荷置き位置にあるときに前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記フォークリフトを前記荷置き位置に対して一旦退避させてから前記荷置き位置に対して再度アプローチさせるように制御する請求項1記載の荷役制御装置。
【請求項8】
前記再アプローチ制御部は、前記荷置き位置に対する前記フォークリフトのアプローチが失敗したと判定された場合は、前記フォークリフトを前記荷置き位置に対して一旦退避させるように制御した後、前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記フォークリフトを前記荷置き位置に対して再度アプローチさせるように制御する請求項1記載の荷役制御装置。
【請求項9】
前記再アプローチ制御部は、前記フォークリフトを前記荷置き位置に対して前記開始位置まで一旦退避させるように制御した後、前記フォークリフトが前記開始位置にあるときに前記位置姿勢算出部により算出された前記フォークリフトに対する前記荷置き箇所の位置及び姿勢に基づいて、前記フォークリフトを前記荷置き位置に対して再度アプローチさせるように制御する請求項8記載の荷役制御装置。
【請求項10】
前記荷置き箇所検知部は、前記フォークリフトが前記荷置き箇所に対して正面を向いた状態で、前記荷置き箇所を検知する請求項1記載の荷役制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、荷役制御装置に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
従来の荷役制御装置としては、例えば特許文献1に記載されている技術が知られている。特許文献1に記載の荷役制御装置は、パレット上に荷物が積載された搬送対象物が設置された設置領域を横切るようにフォークリフトが第1パスに沿って移動する際に、センサにより搬送対象物の位置及び姿勢を検出し、搬送対象物の位置及び姿勢に基づいて、搬送対象物に対して所定の位置及び姿勢となる目標位置までの第2パスを設定し、第2パスに沿ってフォークリフトを移動させる。
【先行技術文献】
【特許文献】
【0003】
特開2022-70559号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、フォークリフトの自動運転によりパレットの荷置きを行う際に、フォークリフトの自己位置の推定誤差またはフォークリフトの誘導誤差が発生すると、荷置き位置に対するフォークリフトのアプローチに失敗し、フォークリフトの位置が荷置き位置に対してずれるため、パレットの荷置きを行うことができない場合がある。この場合には、荷置き位置に対するフォークリフトの再アプローチを実施することで、パレットの荷置きが成功する可能性が高くなる。しかし、例えばパレットが載置される荷台が傾いている状態では、荷置き位置に対するフォークリフトのアプローチに成功しても、パレットの荷置きを行うことができない場合がある。この場合には、荷置き位置に対するフォークリフトのアプローチを何度も実施しても、パレットの荷置きが成功する可能性は低く、結果的にトータルの荷役時間が長くなってしまう。
【0005】
本発明の目的は、トータルの荷役時間を短縮することができる荷役制御装置を提供することである。
【課題を解決するための手段】
【0006】
(1)本発明の一態様は、フォークによりパレットを保持したフォークリフトを開始位置から荷置き箇所に向けて移動させてパレットの荷置きを行う荷役制御装置であって、荷置き箇所を検知する荷置き箇所検知部と、荷置き箇所検知部の検知データに基づいて、フォークリフトに対する荷置き箇所の位置及び姿勢を算出する位置姿勢算出部と、フォークリフトが開始位置にあるときに位置姿勢算出部により算出されたフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、フォークリフトを荷置き箇所の手前の荷置き位置に対してアプローチさせるように制御するアプローチ制御部と、フォークリフトが荷置き位置に達したときに位置姿勢算出部により算出されたフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、荷置き位置に対するフォークリフトのアプローチが成功したかどうかを判定するアプローチ判定部と、アプローチ判定部により荷置き位置に対するフォークリフトのアプローチが成功したと判定された場合に、荷置き箇所に対してパレットの荷置きを行うようにフォークリフトを制御する荷置き制御部と、アプローチ判定部により荷置き位置に対するフォークリフトのアプローチが失敗したと判定された場合に、位置姿勢算出部により算出されたフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、フォークリフトを荷置き位置に対して再度アプローチさせるように制御する再アプローチ制御部と、位置姿勢算出部により算出されたフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、荷置き箇所に対するパレットの荷置きが成功する可能性があるかどうかを判定する荷置き可否判定部と、荷置き可否判定部により荷置き箇所に対するパレットの荷置きが成功する可能性がないと判定された場合に、フォークリフトの走行を異常停止させるようにフォークリフトを制御する異常停止制御部とを備える。
【0007】
このような荷役制御装置では、開始位置において荷置き箇所が検知され、フォークリフトに対する荷置き箇所の位置及び姿勢が算出される。そして、そのフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、フォークリフトが荷置き箇所の手前の荷置き位置に対してアプローチするように制御される。フォークリフトが荷置き位置に達すると、再び荷置き箇所が検知され、フォークリフトに対する荷置き箇所の位置及び姿勢が算出される。そして、そのフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、荷置き位置に対するフォークリフトのアプローチが成功したかどうかが判定される。荷置き位置に対するフォークリフトのアプローチが成功したと判定された場合は、荷置き箇所に対してパレットの荷置きを行うようにフォークリフトが制御される。荷置き位置に対するフォークリフトのアプローチが失敗したと判定された場合は、フォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、フォークリフトが荷置き位置に対して再度アプローチするように制御される。また、フォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、荷置き箇所に対するパレットの荷置きが成功する可能性があるかどうかが判定される。荷置き箇所に対するパレットの荷置きが成功する可能性がないと判定された場合は、フォークリフトの走行を異常停止させるようにフォークリフトが制御される。このように荷置き箇所に対するパレットの荷置きが成功する可能性がないと判定された場合は、フォークリフトの走行を異常停止させることにより、無駄となるフォークリフトのアプローチを実施しなくて済む。これにより、トータルの荷役時間が短縮される。
【0008】
(2)上記の(1)において、荷置き可否判定部は、フォークリフトが開始位置にあるときに位置姿勢算出部により算出されたフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、荷置き箇所に対するパレットの荷置きが成功する可能性があるかどうかを判定し、アプローチ制御部は、荷置き可否判定部により荷置き箇所に対するパレットの荷置きが成功する可能性があると判定された場合に、フォークリフトが開始位置にあるときに位置姿勢算出部により算出されたフォークリフトに対する荷置き箇所の位置及び姿勢に基づいて、フォークリフトを荷置き位置に対してアプローチさせるように制御してもよい。
【0009】
このような構成では、フォークリフトが開始位置にあるときに、荷置き箇所に対するパレットの荷置きが成功する可能性があるかどうかが判定される。このとき、荷置き箇所に対するパレットの荷置きが成功する可能性がないと判定された場合は、フォークリフトのアプローチを開始位置から実施しなくて済む。従って、トータルの荷役時間が更に短縮される。
【0010】
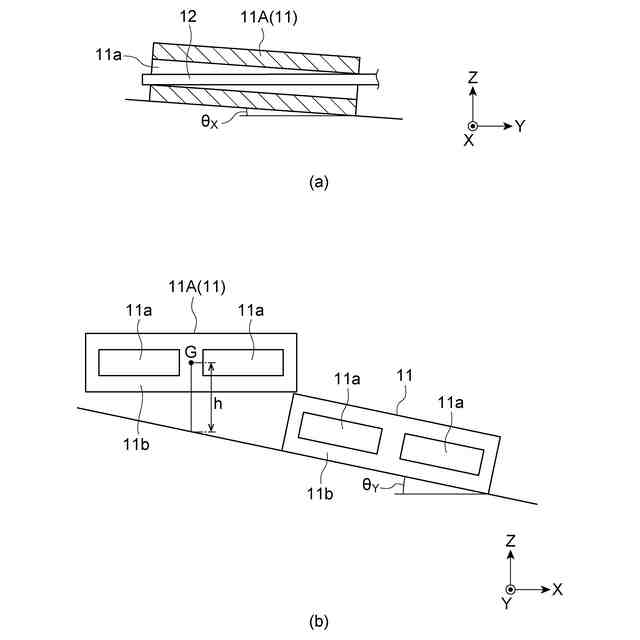
(3)上記の(1)または(2)において、荷置き可否判定部は、荷置き箇所に対するフォークリフトのピッチ角が予め決められたピッチ角閾値以下であると共に、荷置き箇所に対するフォークリフトのロール角が予め決められたロール角閾値以下であるときは、荷置き箇所に対するパレットの荷置きが成功する可能性があると判定し、荷置き箇所に対するフォークリフトのピッチ角がピッチ角閾値よりも大きいとき、または荷置き箇所に対するフォークリフトのロール角がロール角閾値よりも大きいときは、荷置き箇所に対するパレットの荷置きが成功する可能性がないと判定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
産業車両
2日前
株式会社豊田自動織機
荷役装置
7日前
株式会社豊田自動織機
双方向充電器
1日前
株式会社豊田自動織機
ターボチャージャ
7日前
株式会社豊田自動織機
燃料電池ユニット
13日前
株式会社豊田自動織機
内燃機関の制御装置
今日
株式会社豊田自動織機
織機用異常検知装置
7日前
株式会社豊田自動織機
繊維機械の検査システム
7日前
トヨタ自動車株式会社
蓄電池
今日
株式会社豊田自動織機
内燃機関の吸気温度制御システム
7日前
株式会社豊田自動織機
繊維構造体、及び繊維強化複合材
7日前
トヨタ自動車株式会社
蓄電モジュール
今日
トヨタ自動車株式会社
蓄電装置の製造方法
10日前
トヨタ自動車株式会社
二次電池及び二次電池の制御方法
9日前
株式会社アルテックス
ダイカスト装置及び鋳造品の製造方法
今日
個人
自走手摺
3か月前
個人
転落防止階段
7日前
個人
小型クレーン
1日前
ユニパルス株式会社
吊具
5か月前
個人
海上コンテナ昇降装置
10か月前
ユニパルス株式会社
荷役装置
10か月前
ユニパルス株式会社
吊具装置
11か月前
株式会社いうら
車椅子用昇降機
3か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
産業車両
11か月前
水戸工業株式会社
吊り具
7か月前
ユニパルス株式会社
リフト装置
5か月前
株式会社豊田自動織機
荷役車両
9か月前
ユニパルス株式会社
荷役助力装置
4か月前
岐阜工業株式会社
運搬台車
8日前
ユニパルス株式会社
荷役助力装置
6か月前
個人
エアバック式レスキュー用品
1か月前
愛知製鋼株式会社
受け架台
2か月前
株式会社伊藤
滑り止め装置
3か月前
白山工業株式会社
バランサ
7か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ