TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025145408
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045571
出願日
2024-03-21
発明の名称
センサユニット及びセンサユニットを備えるタイヤ
出願人
横浜ゴム株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60C
19/00 20060101AFI20250926BHJP(車両一般)
要約
【課題】弾性体に他方向からの応力が複雑に加わった場合などの、当該弾性体が複雑な変形挙動を示す場合であっても、弾性体の撓みを高精度に決定することが可能なセンサユニットを提供すること。
【解決手段】センサユニット(10)は、弾性体(E)の表面に配置されて弾性体の曲げ変形時に弾性体の撓みを決定し、1つの永久磁石(12)と、少なくとも2つの磁気センサ素子(14a、14b)と、を含み、少なくとも2つの磁気センサ素子のそれぞれから出力される信号を用いて演算することにより、弾性体の撓みが決定される。
【選択図】図1
特許請求の範囲
【請求項1】
弾性体の表面に配置されて前記弾性体の曲げ変形時に前記弾性体の撓みを決定するセンサユニットであって、
前記センサユニットは、1つの永久磁石と、少なくとも2つの磁気センサ素子と、を含み、
前記少なくとも2つの磁気センサ素子のそれぞれから出力される信号を用いて演算することにより、前記弾性体の撓みが決定されることを特徴とする、センサユニット。
続きを表示(約 1,600 文字)
【請求項2】
前記弾性体の表面が凹状曲面であり、
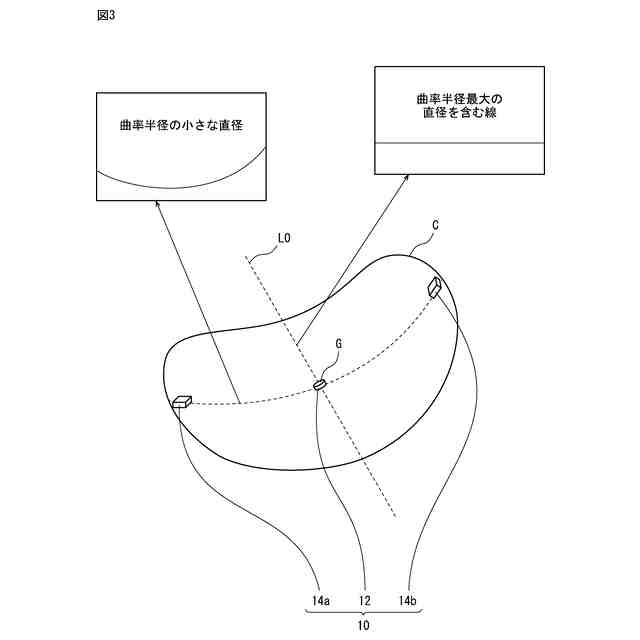
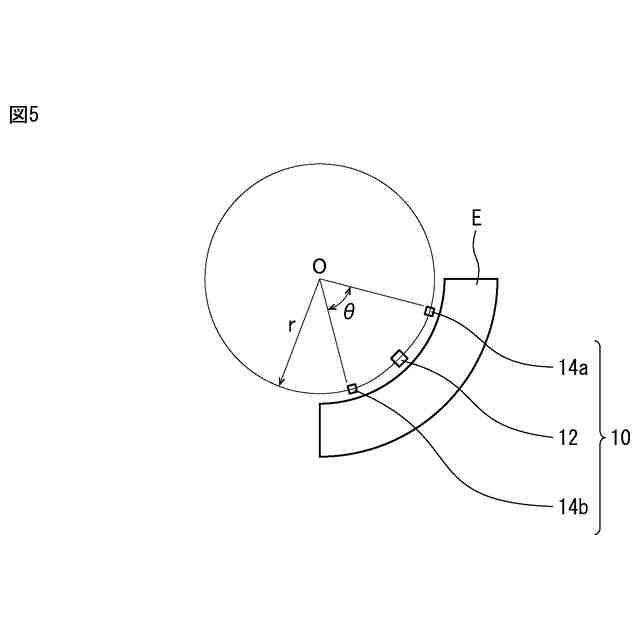
前記永久磁石の重心を中心とし、前記重心から前記弾性体表面に下した垂線を含む直線に垂直な面に含まれ、かつ、前記直線と前記磁気センサとの最短距離を半径とする円を前記弾性体に投影した凹状円を決定し、次いで前記凹状円の直径のうち曲率半径が最も大きな直径を含む線を基準線とした場合に、前記凹状円内において基準線の一方側と他方側のそれぞれの領域に少なくとも1つの磁気センサ素子が配置されている、請求項1に記載のセンサユニット。
【請求項3】
前記弾性体に前記センサユニットを配置した、前記弾性体の曲げ変形前の状態において、前記磁気センサ素子は、
前記凹状曲面への前記永久磁石の配置高さの中心線上に配置され、或いは
前記中心線に対して前記永久磁石の配置面とは逆側に配置されている、
請求項2に記載のセンサユニット。
【請求項4】
前記凹状円内において前記基準線の一方側に直接的に又は間接的に配置された磁気センサ素子のうちの1つの磁気センサ素子の重心と、前記凹状円内において前記基準線の他方側に直接的に又は間接的に配置された磁気センサ素子のうちの1つの磁気センサ素子の重心と、前記永久磁石の重心と、の3点を通る円の半径rが、20mm以上120mm以下である、請求項2又は3に記載のセンサユニット。
【請求項5】
前記凹状円内において前記基準線の一方側に直接的に又は間接的に配置された磁気センサ素子のうちの1つの磁気センサ素子の重心と、前記凹状円内において前記基準線の他方側に直接的に又は間接的に配置された磁気センサ素子のうちの1つの磁気センサ素子の重心と、前記永久磁石の重心と、の3点を通る円において、前記2つの磁気センサ素子の重心同士を結ぶ円弧のなす角θが、5.5°以上60°以下である、請求項2又は3に記載のセンサユニット。
【請求項6】
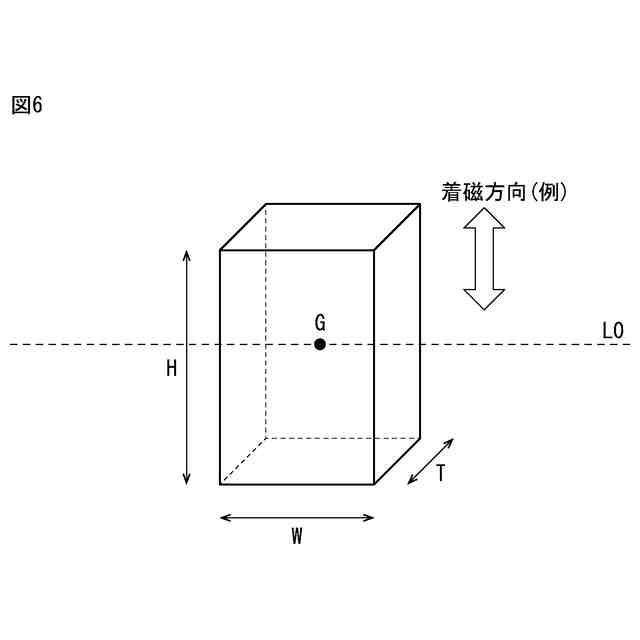
前記永久磁石について、
重心から前記弾性体の凹状曲面への垂線の方向である高さ方向の寸法Hと、
前記基準線の方向の寸法Wと、
前記高さ方向及び前記基準線の方向との両方に垂直な方向の寸法Tと、
のうち、寸法Tが最も小さい、請求項2又は3に記載のセンサユニット。
【請求項7】
前記永久磁石と前記少なくとも2つの磁気センサ素子とが、非磁性体であって非伸縮性の可撓性シートを介して、前記弾性体に配置されている、請求項2又は3に記載のセンサユニット。
【請求項8】
前記基準線を前記凹状曲面の垂線の方向において前記可撓性シートの凹状曲面に投影した線をシート表面基準線とし、
平面視で、前記シート表面基準線に平行であって前記磁気センサ素子を前記シート表面基準線側に含むとともに前記磁気センサ素子の端部を通る2本の線をそれぞれシート表面外線とし、2本の前記シート表面外線の間に存在する前記可撓性シートの領域をセンシング領域とした場合に、
前記センシング領域の裏面の60%以上が、前記弾性体に接着されている、請求項7に記載のセンサユニット。
【請求項9】
前記可撓性シートを前記弾性体に配置していない状態において、前記可撓性シートから前記磁気センサ素子の最高点までの寸法Hcと、前記永久磁石と前記磁気センサ素子との間の距離d(mm)は、以下の関係を満たす、請求項7又は8に記載のセンサユニット。
Hc≦30-120{cos(d/50)―0.5)}
2
【請求項10】
前記可撓性シートはフレキシブル基板であり、
導電体からなる電気配線を備え、前記磁気センサ素子が前記電気配線に接続するように実装されている、請求項7又は8に記載のセンサユニット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、弾性体の撓みを高精度に決定することができるセンサユニット、及びセンサユニットを備えるタイヤに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、柔軟に変形可能な材料により略シート状に形成され、タイヤに設置される基材と、前記基材に設けられ、前記タイヤの歪(撓み)を検出するセンサと、を備えるタイヤセンサユニットが開示されている(例えば、特許文献1、図2)。特許文献1のタイヤセンサユニットによれば、センサが設けられた基材をタイヤに設置するという簡単な工程でタイヤセンサユニットをタイヤに設置することができるため、タイヤセンサユニットのタイヤへの設置を容易に行うことができ、タイヤの生産性を良好に保持できる、とされている。
【先行技術文献】
【特許文献】
【0003】
特開2006-64565号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のタイヤセンサユニットにおいては、センサが1つの磁石と1つの磁気センサ素子とから構成されている。このため、磁気センサ素子から出力される1つの信号によりタイヤの撓みを決定せねばならず、特にタイヤに多方向からの応力が加わった場合などの、タイヤが複雑な変形挙動を示す際には、タイヤの撓みを高精度に決定することができないおそれがある。
【0005】
本発明は、上記事情に鑑みてなされたものであって、その目的は、特にタイヤに限らず、弾性体に多方向からの応力が加わった場合などの、当該弾性体が複雑な変形挙動を示す場合であっても、弾性体の撓みを高精度に決定することが可能なセンサユニットを提供することにある。
【課題を解決するための手段】
【0006】
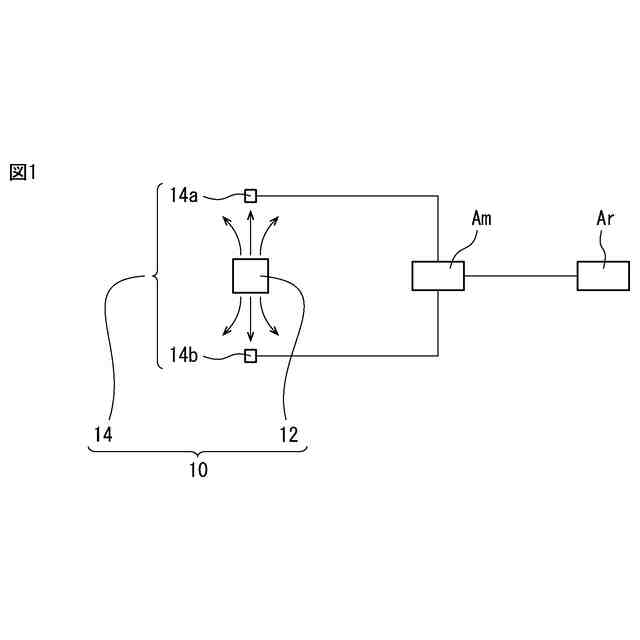
本発明のセンサユニットは、弾性体の表面に配置されて前記弾性体の曲げ変形時に前記弾性体の撓みを決定するセンサユニットであって、前記センサユニットは、1つの永久磁石と、少なくとも2つの磁気センサ素子と、を含み、前記少なくとも2つの磁気センサ素子のそれぞれから出力される信号を用いて演算することにより、前記弾性体の撓みが決定される、ことを特徴とする。
【発明の効果】
【0007】
本発明に係るセンサユニットでは、1つのセンサユニットの中に2つ以上の磁気センサ素子が含まれる。このため、各磁気センサ素子から出力される信号の値を時系列的に比較したり、複数の磁気センサ素子から出力される信号の値の差分を時系列的に比較したりすることができる他、複数の磁気センサ素子から出力される信号の値を組み合わせることで、当該弾性体が複雑な変形挙動を示す場合であっても、弾性体の撓みを高精度に決定することできる。
【図面の簡単な説明】
【0008】
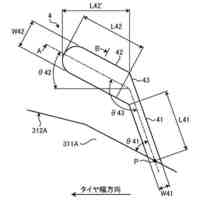
図1は、本実施形態のセンサユニットを示す図である。
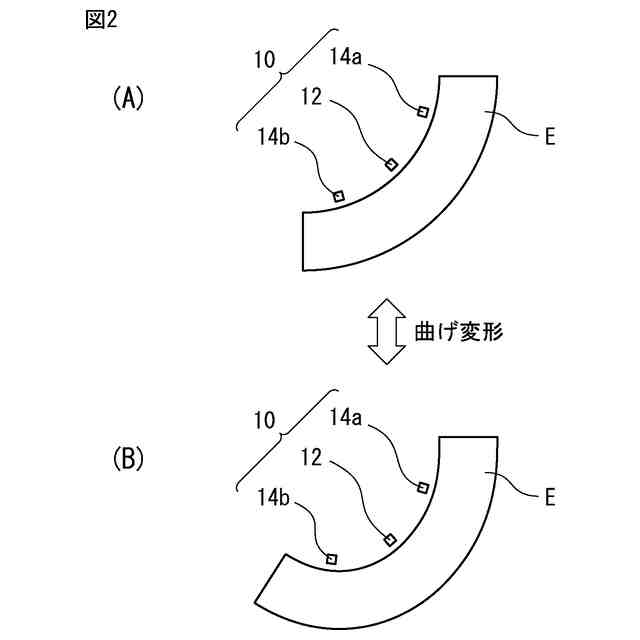
図2は、図1に示すセンサユニットが弾性体上に配置された状態で当該弾性体が曲げ変形を行った際のセンサユニットの変形挙動を示す図である。
図3は、図2に示すセンサユニットを凹状曲面の弾性体に配置した状態での永久磁石と磁気センサ素子との三次元的な位置関係を示す図である。
図4は、弾性体の凹状曲面にセンサユニットを配置する場合に、磁気センサ素子の位置について好適な例(A)、(B)と不適な例(C)とを示す図である。
図5は、センサユニットを構成する永久磁石と2つの磁気センサ素子との各重心を通る円を示す図である。
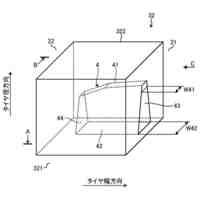
図6は、基準線と、永久磁石の3方向についての関係を示す図である。
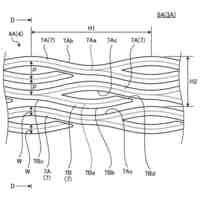
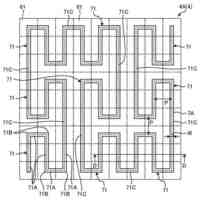
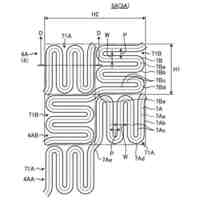
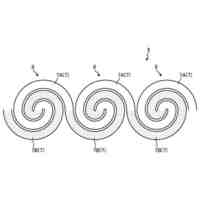
図7は、可撓性シートに永久磁石と磁気センサ素子とが形成されたセンサユニットを示す図であり、(A)は磁気センサ素子が2個の場合を示し、(B)、(C)は磁気センサ素子が3個の場合を示し、(D)は磁気センサ素子が4個の場合を示す。
図8は、弾性体上での可撓性シートの接着状態を示す図である。
図9は、弾性体への可撓性シート(センサユニット)の配置前後における、永久磁石と磁気センサ素子との位置関係を示す図であり、(A)は配置前において着磁方向が可撓性シートに垂直な方向である場合を示し、(B)は配置前において着磁方向が可撓性シートに平行な方向である場合を示す。
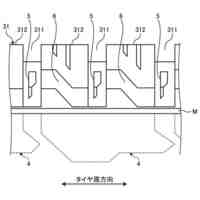
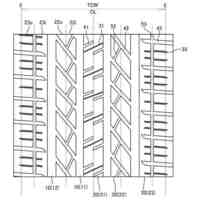
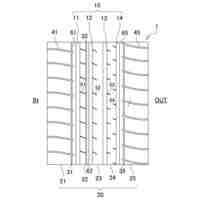
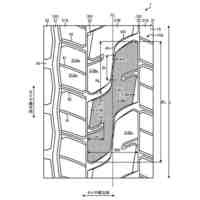
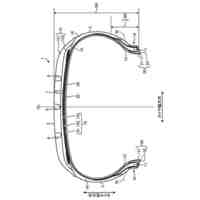
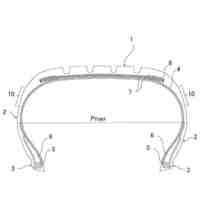
図10は、本実施形態のタイヤの一部を示すタイヤ子午断面図である。
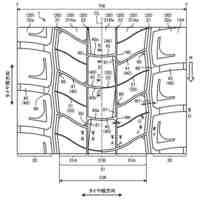
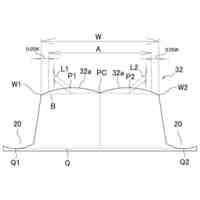
図11は、タイヤ内腔面における基準線の位置を示すタイヤ子午断面図であり、(A)は基準線のみならずタイヤ幅方向内側の磁気センサ素子14aについてもタイヤ内腔面の所定の範囲に位置する例を示す一方、(B)はタイヤ幅方向内側の磁気センサ素子14aについてはタイヤ内腔面の所定の範囲に位置しない例を示す。
図12は、タイヤ内腔面における基準線の位置と、可撓性シートのタイヤ赤道面に近い側の端部の位置と、を示すタイヤ子午断面図である。
図13は、永久磁石と、磁気センサ素子と、ベルトとの位置関係を示す図であり、(A)は磁気センサ素子とベルトとの位置関係を示し、(B)は永久磁石と磁気センサ素子との位置関係を示す。
図14は、永久磁石の寸法とタイヤ厚みとの関係を示すタイヤ子午断面図である。
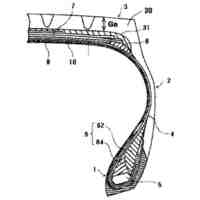
図15は、センサユニットに接続される回路基板を配置するのに好適な位置を示すタイヤ子午断面図であり、(A)は回路基板が、配置するのに不所望な領域よりもトレッド部中央側に配置された例を示し、(B)は回路基板が、配置するのに不所望な領域よりもビード部側に配置された例を示す。
【発明を実施するための形態】
【0009】
以下に、本発明に係るセンサユニットの実施形態(以下に示す、基本形態1及び付加的形態2~10)、並びに本発明に係るタイヤの実施形態(以下に示す、基本形態11及び付加的形態12~16)を、図面に基づいて詳細に説明する。なお、これらの実施形態は、本発明を限定するものではない。また、各実施形態の構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。さらに、各実施形態は、当業者が自明の範囲内で任意に組み合わせることができる。
【0010】
以下の説明において、タイヤ径方向とは、タイヤ回転軸と直交する方向をいい、タイヤ径方向内側とはタイヤ径方向においてタイヤ回転軸に向かう側、タイヤ径方向外側とはタイヤ径方向においてタイヤ回転軸から離れる側をいう。また、タイヤ周方向とは、タイヤ回転軸を中心軸とする周り方向をいう。さらに、タイヤ幅方向とは、タイヤ回転軸と平行な方向をいい、タイヤ幅方向内側とはタイヤ幅方向においてタイヤ赤道面(タイヤ赤道線)に向かう側、タイヤ幅方向外側とはタイヤ幅方向においてタイヤ赤道面から離れる側をいう。なお、タイヤ赤道面とは、タイヤ回転軸に直交するとともに、タイヤのタイヤ幅の中心を通る平面をいう。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
横浜ゴム株式会社
タイヤ
2か月前
横浜ゴム株式会社
タイヤ
19日前
横浜ゴム株式会社
タイヤ
29日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
19日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
19日前
横浜ゴム株式会社
タイヤ
19日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
3日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
29日前
横浜ゴム株式会社
タイヤ
29日前
横浜ゴム株式会社
タイヤ
29日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
29日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
9日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
15日前
横浜ゴム株式会社
タイヤ
15日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
タイヤ
8日前
横浜ゴム株式会社
タイヤ
8日前
横浜ゴム株式会社
タイヤ
9日前
横浜ゴム株式会社
タイヤ
1か月前
横浜ゴム株式会社
重荷重タイヤ
15日前
横浜ゴム株式会社
空気入りタイヤ
2か月前
横浜ゴム株式会社
空気入りタイヤ
1か月前
横浜ゴム株式会社
空気入りタイヤ
19日前
横浜ゴム株式会社
空気入りタイヤ
1か月前
横浜ゴム株式会社
空気入りタイヤ
16日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ