TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140042
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039190
出願日
2024-03-13
発明の名称
塗装装置、情報処理装置、塗装方法、及びプログラム
出願人
株式会社リコー
代理人
個人
,
個人
主分類
B05C
11/10 20060101AFI20250919BHJP(霧化または噴霧一般;液体または他の流動性材料の表面への適用一般)
要約
【課題】対象物と塗装ヘッドとの三次元的な位置合わせ精度を高くする。
【解決手段】本発明の一態様に係る塗装装置は、対象物に液体を吐出して当該対象物を塗装する塗装ヘッドと、前記塗装ヘッドを移動させる移動機構と、前記対象物における3つ以上の特徴点の三次元位置に関する三次元位置情報(E)を出力する検出部と、前記塗装ヘッドによる前記液体の吐出及び前記移動機構の動作の少なくとも一方を制御する制御部と、を有し、前記制御部は、前記対象物の形状に関する対象物形状情報(D)と、前記三次元位置情報(E)と、から得られる前記対象物の形状の差分情報(X)に基づき制御情報を生成し、該制御情報により、前記液体の吐出及び前記移動機構の動作の少なくとも一方を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
対象物に液体を吐出して当該対象物を塗装する塗装ヘッドと、
前記塗装ヘッドを移動させる移動機構と、
前記対象物における3つ以上の特徴点の三次元位置に関する三次元位置情報(E)を出力する検出部と、
前記塗装ヘッドによる前記液体の吐出及び前記移動機構の動作の少なくとも一方を制御する制御部と、
を有し、
前記制御部は、前記対象物の形状に関する対象物形状情報(D)と、前記三次元位置情報(E)と、から得られる前記対象物の形状の差分情報(X)に基づき制御情報を生成し、該制御情報により、前記液体の吐出及び前記移動機構の動作の少なくとも一方を制御する、塗装装置。
続きを表示(約 1,400 文字)
【請求項2】
前記制御情報は、前記対象物形状情報(D)による前記移動機構の経路情報(T1)を補正した補正経路情報(T2)である請求項1に記載の塗装装置。
【請求項3】
前記制御情報は、前記移動機構の経路情報(T1)若しくは前記補正経路情報(T2)に対応した補正画像データ(G1)である請求項2に記載の塗装装置。
【請求項4】
前記対象物形状情報(D)は、前記対象物の設計データである、請求項1に記載の塗装装置。
【請求項5】
前記制御部は、
1つ目の前記対象物の塗装において、既定の前記対象物の形状データを前記対象物形状情報(D)とし、
該対象物形状情報(D)と、1つ目の前記対象物の前記三次元位置情報(E1)と、から得られる前記差分情報(X)に基づき、1つ目の前記対象物を塗装するように制御し、
2つ目以降の前記対象物の塗装において、1つ目の前記対象物における前記三次元位置情報(E1)を、2つ目以降の前記対象物形状情報(Dn)とし、
該対象物形状情報(Dn)と、2つ目以降の前記対象物の前記三次元位置情報(En)と、から得られる前記差分情報(Xn)に基づき、2つ目以降の前記対象物(n)を塗装するように制御する、請求項1から4のいずれか1項に記載の塗装装置。
【請求項6】
複数の対象物を順番に塗装し、
前記制御部は、1つ目の前記対象物の塗装において、既定の前記対象物の形状データを前記対象物形状情報(D)とし、
2つ目以降の前記対象物の塗装において、1つ前に検出された前記対象物における前記三次元位置情報(En-1)を、2つ目以降の前記対象物形状情報(Dn)とする、請求項1から4のいずれか1項に記載の塗装装置。
【請求項7】
前記制御部は、前記補正画像データ(G1)に基づいて吐出する、請求項3に記載の塗装装置。
【請求項8】
前記制御部は、前記対象物形状情報(D)と、前記三次元位置情報(E)と、から得られる前記対象物形状情報(D)に対する前記対象物の位置及び傾きそれぞれのずれに、さらに基づいて制御する、請求項1に記載の塗装装置。
【請求項9】
塗装ヘッドから吐出された液体により対象物を塗装する塗装装置と通信可能な情報処理装置であって、
前記対象物の形状に関する対象物形状情報(D)と、前記対象物における3つ以上の特徴点の三次元位置に関する三次元位置情報(E)と、から得られる前記対象物の形状の差分情報(X)に基づき制御情報を生成し、該制御情報により、前記液体の吐出及び移動機構の動作の少なくとも一方を制御する、情報処理装置。
【請求項10】
塗装ヘッドから吐出された液体により対象物を塗装する塗装装置による塗装方法であって、
前記対象物における3つ以上の特徴点の三次元位置に関する三次元位置情報(E)を出力し、
前記対象物の形状に関する対象物形状情報(D)と、前記三次元位置情報(E)と、から得られる前記対象物の形状の差分情報(X)に基づき制御情報を生成し、該制御情報により、前記液体の吐出及び前記塗装ヘッドの移動機構の動作の少なくとも一方を制御する、塗装方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、塗装装置、情報処理装置、塗装方法、及びプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、塗装ヘッドから吐出した液体により対象物を塗装する塗装装置が知られている。
【0003】
また、ロボットアーム等の移動機構の先端に取り付けられた塗装用のベルと車両ボディとの距離を一定にして塗装するために、移動機構の先端に取り付けられた距離センサを用い、車両ボディの搬入位置における形状に応じて、オフラインティーチングの走査経路データを補正する技術が開示されている(例えば、特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0004】
塗装装置では、対象物と塗装ヘッドとの三次元的な位置合わせが求められる。しかしながら、対象物の形状の個体差により、対象物と塗装ヘッドとの三次元的な位置合わせの精度が低下する場合がある。
【0005】
本発明は、対象物と塗装ヘッドとの三次元的な位置合わせ精度を高くすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る塗装装置は、対象物に液体を吐出して当該対象物を塗装する塗装ヘッドと、前記塗装ヘッドを移動させる移動機構と、前記対象物における3つ以上の特徴点の三次元位置に関する三次元位置情報(E)を出力する検出部と、前記塗装ヘッドによる前記液体の吐出及び前記移動機構の動作の少なくとも一方を制御する制御部と、を有し、前記制御部は、前記対象物の形状に関する対象物形状情報(D)と、前記三次元位置情報(E)と、から得られる前記対象物の形状の差分情報(X)に基づき制御情報を生成し、該制御情報により、前記液体の吐出及び前記移動機構の動作の少なくとも一方を制御する。
【発明の効果】
【0007】
本発明によれば、対象物と塗装ヘッドとの三次元的な位置合わせ精度を高くすることができる。
【図面の簡単な説明】
【0008】
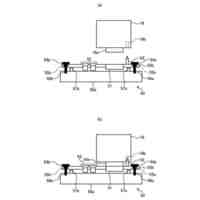
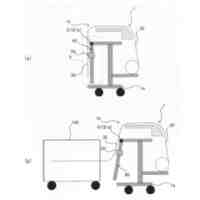
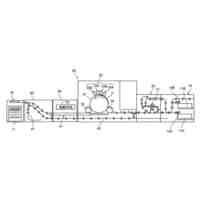
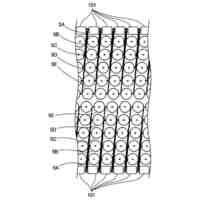
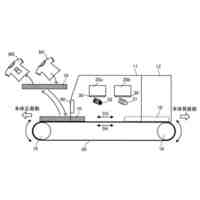
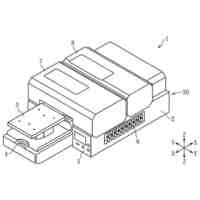
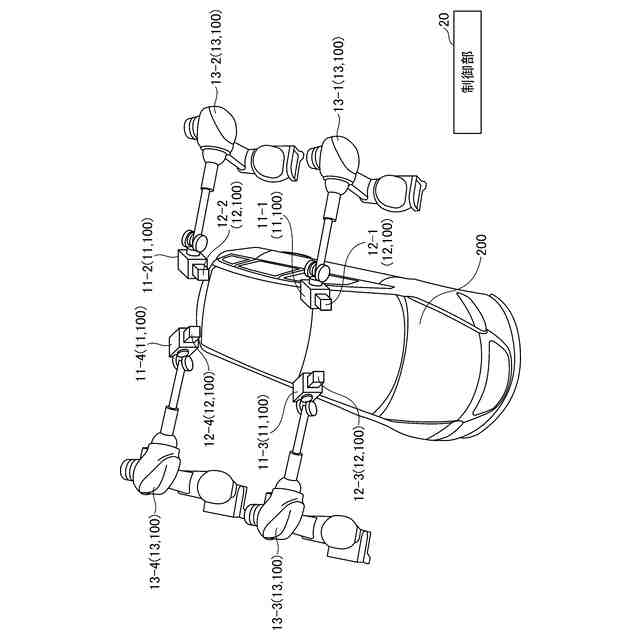
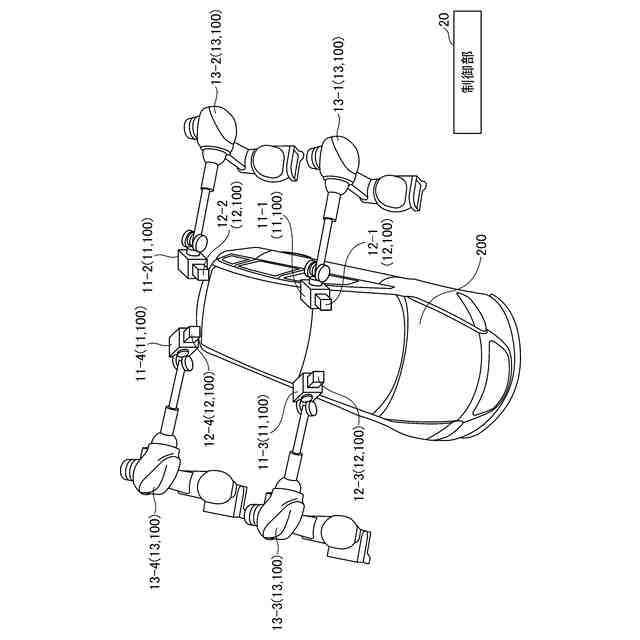
本発明の第1実施形態に係る塗装装置の全体構成を示す図である。
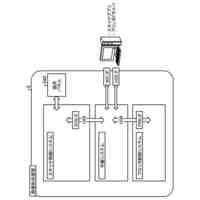
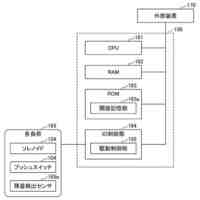
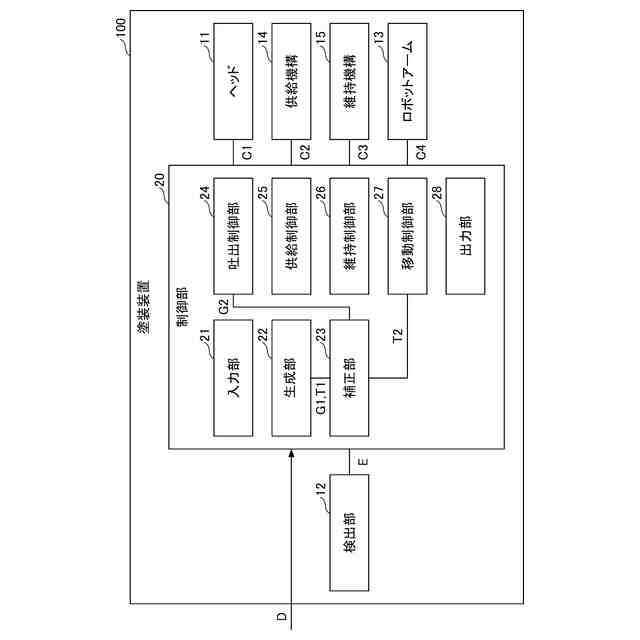
本発明の第1実施形態に係る塗装装置の全体構成を示すブロック図である。
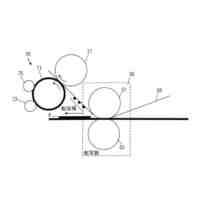
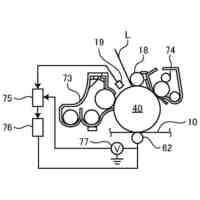
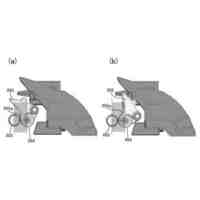
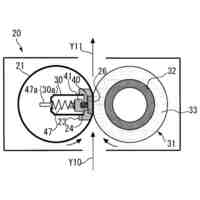
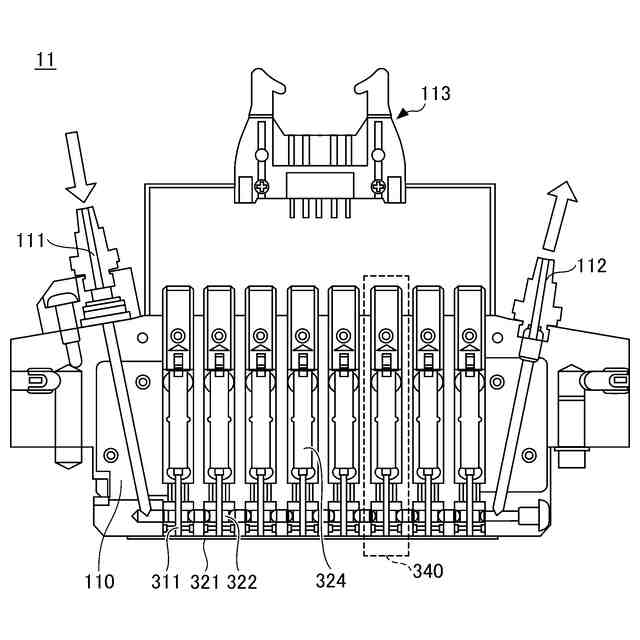
本発明の第1実施形態に係る塗装装置が備える供給機構の構成を示す図である。
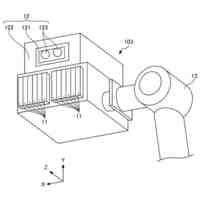
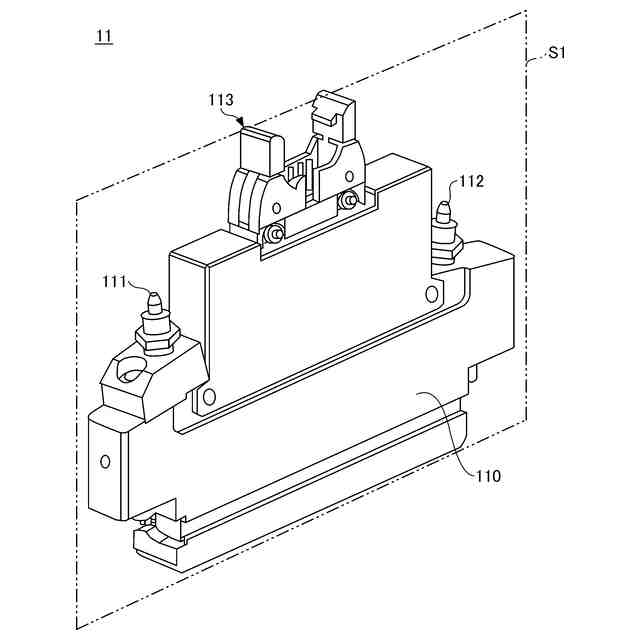
本発明の第1実施形態に係る塗装装置が備えるヘッドの構成を示す斜視図である。
図4の平面S1により切断したヘッドの断面図である。
本発明の第1実施形態に係る塗装装置が備える制御部の機能構成を示すブロックチャートである。
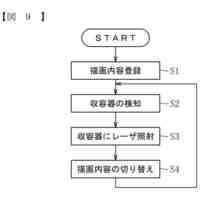
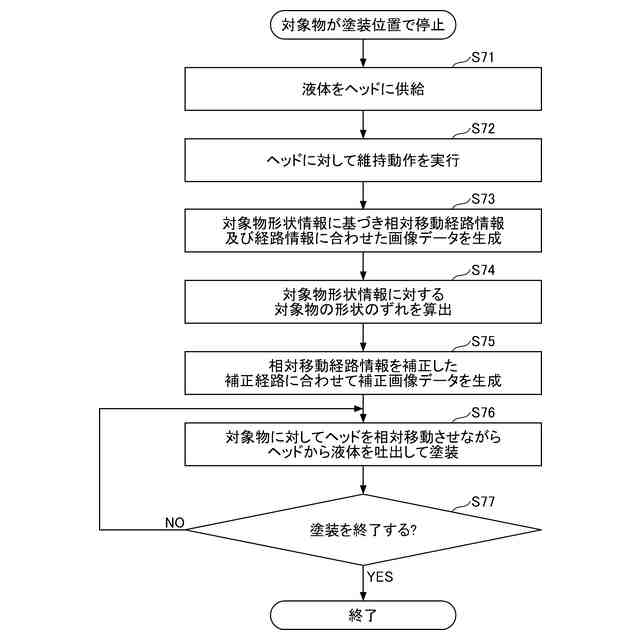
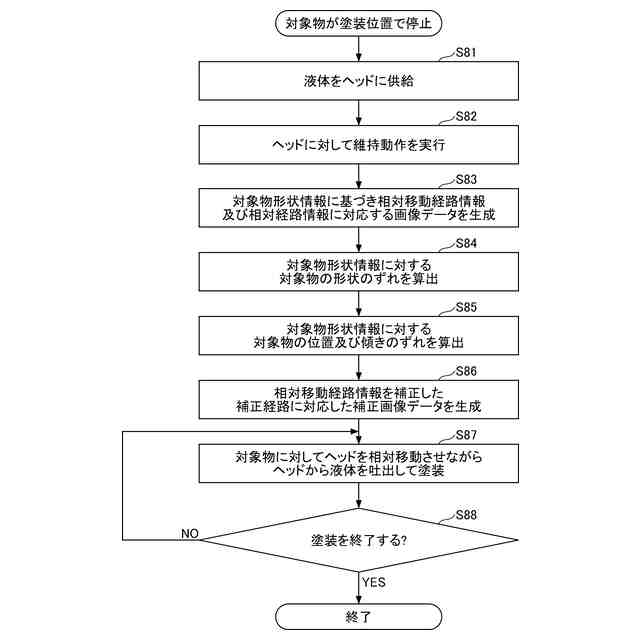
本発明の第1実施形態に係る塗装装置による塗装動作の第1例を示すフローチャートである。
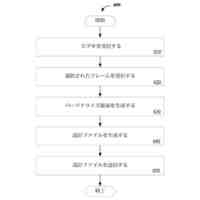
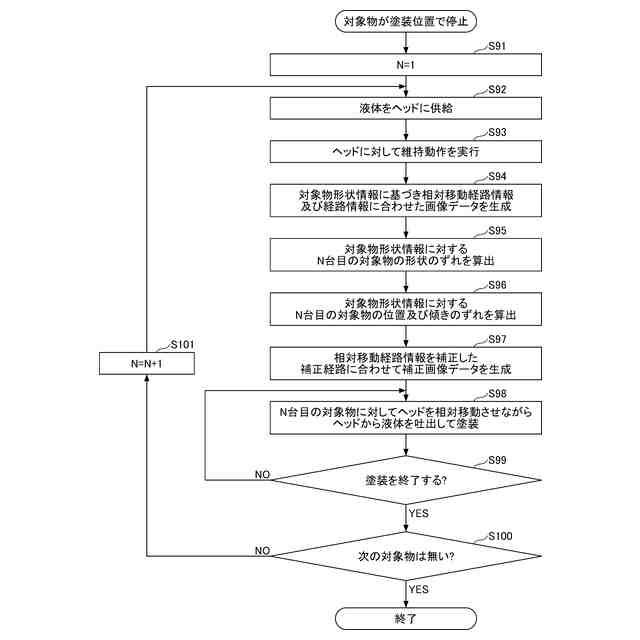
本発明の第1実施形態に係る塗装装置による塗装動作の第2例を示すフローチャートである。
本発明の第1実施形態に係る塗装装置による塗装動作の第3例を示すフローチャートである。
本発明の第1実施形態に係る塗装装置による塗装動作の第4例を示すフローチャートである。
本発明の第1実施形態に係る塗装装置による塗装動作の第5例を示すフローチャートである。
本発明の第1実施形態に係る塗装装置が備える制御部による対象物の形状、位置及び傾きずれの算出処理を示すフローチャートである。
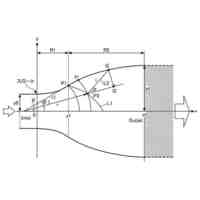
本発明の第1実施形態に係る塗装装置が備える補正部による対象物の形状のずれの算出方法について説明する図である。
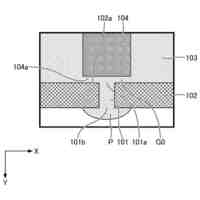
本発明の第1実施形態に係る塗装装置における特徴点を説明する図である。
図9における領域Xの拡大図である。
図9における領域XIの拡大図である。
図9における領域XIIの拡大図である。
図9における領域XIIIの拡大図である。
本発明の第1実施形態に係る塗装装置における特徴点の座標処理方法を説明する第1図である。
本発明の第1実施形態に係る塗装装置における特徴点の座標処理方法を説明する第2図である。
本発明の第1実施形態に係る塗装装置における相対移動経路情報の補正結果を説明する図である。
本発明の第1実施形態に係る塗装装置における相対移動経路情報を示す図である。
本発明の第1実施形態に係る塗装装置における補正経路情報を示す図である。
主走査方向において伸縮があった場合の一例を説明する図である。
副走査方向において伸縮があった場合の一例を説明する図である。
形状が伸縮した場合の画像データの補正のイメージ図である。
本発明の第2実施形態に係る塗装装置が備える制御部の機能構成を示すブロック図である。
本発明の第2実施形態に係る塗装装置が備える制御部によるルーフ部に対するルーフサイド部の傾き量の検出処理を示すフローチャートである。
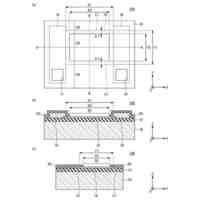
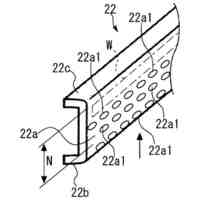
ルーフ部の後部におけるルーフモール溝を説明する図である。
図23における領域XXIVの拡大図である。
図24におけるXXV-XXV線の断面図である。
ルーフ部の前部におけるルーフモール溝を説明する図である。
ルーフサイド部における相対移動経路情報を説明する図である。
ルーフサイド部における補正経路情報を説明する図である。
【発明を実施するための形態】
【0009】
本発明の実施形態に係る塗装装置、情報処理装置、塗装方法、及びプログラムについて図面を参照しながら詳細に説明する。但し、以下に示す形態は、本実施形態の技術思想を具現化するための塗装装置、情報処理装置、塗装方法、及びプログラムを例示するものであって、以下に限定するものではない。また、実施形態に記載されている構成部の寸法、材質、形状、その相対的配置等は、特定的な記載がない限り、本発明の範囲をそれのみに限定する趣旨ではなく、単なる説明例にすぎない。なお、各図面が示す部材の大きさ、位置関係等は、説明を明確にするため誇張していることがある。また、以下の説明において、同一の名称、符号については同一もしくは同質の部材を示しており詳細説明を適宜省略する。
【0010】
以下に示す図において、方向表現として、互いに直交するX軸、Y軸及びZ軸を用いる場合がある。X軸に沿う方向をX方向と表記し、Y軸に沿う方向をY方向と表記し、Z軸に沿う方向をZ方向と表記する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社リコー
液体塗布装置
11日前
株式会社リコー
画像形成装置
3日前
株式会社リコー
画像形成装置
7日前
株式会社リコー
画像形成装置
7日前
株式会社リコー
画像形成装置
10日前
株式会社リコー
画像形成装置
7日前
株式会社リコー
印刷システム
7日前
株式会社リコー
画像形成装置
18日前
株式会社リコー
感熱記録媒体
4日前
株式会社リコー
画像形成システム
3日前
株式会社リコー
生体情報測定装置
4日前
株式会社リコー
印刷応答補償機構
11日前
株式会社リコー
画像投射システム
18日前
株式会社リコー
拡張アンテナ装置
10日前
株式会社リコー
液体を吐出する装置
4日前
株式会社リコー
マーキングシステム
10日前
株式会社リコー
電極及びその製造方法
7日前
株式会社リコー
電極及びその製造方法
5日前
株式会社リコー
多孔質構造体の製造方法
7日前
株式会社リコー
定着装置及び画像形成装置
11日前
株式会社リコー
定着装置及び画像形成装置
17日前
株式会社リコー
液吐出装置、及び液吐出方法
11日前
株式会社リコー
液体塗布装置および洗浄方法
7日前
株式会社リコー
印刷装置および印刷システム
3日前
株式会社リコー
パルスバルブおよび塗布装置
7日前
株式会社リコー
ファイル分析・保存システム
7日前
株式会社リコー
センサ素子及びセンサアレイ
17日前
株式会社リコー
センサ素子及びセンサアレイ
17日前
株式会社リコー
塗装システム、及び塗装方法
7日前
株式会社リコー
定着装置、及び、画像形成装置
7日前
株式会社リコー
定着装置、及び、画像形成装置
7日前
株式会社リコー
後処理装置および画像形成装置
7日前
株式会社リコー
液体吐出装置及び液体吐出方法
3日前
株式会社リコー
ベルト装置、及び、画像形成装置
3日前
株式会社リコー
レーザ照射装置、レーザ照射方法
7日前
株式会社リコー
パーソナライズビデオメカニズム
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ