TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025130283
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027358
出願日
2024-02-27
発明の名称
ロボット、モーターユニット、およびロボットの制御方法
出願人
セイコーエプソン株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B25J
13/00 20060101AFI20250901BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットにおいて、低減すべき振動の周波数の変化に対応する。
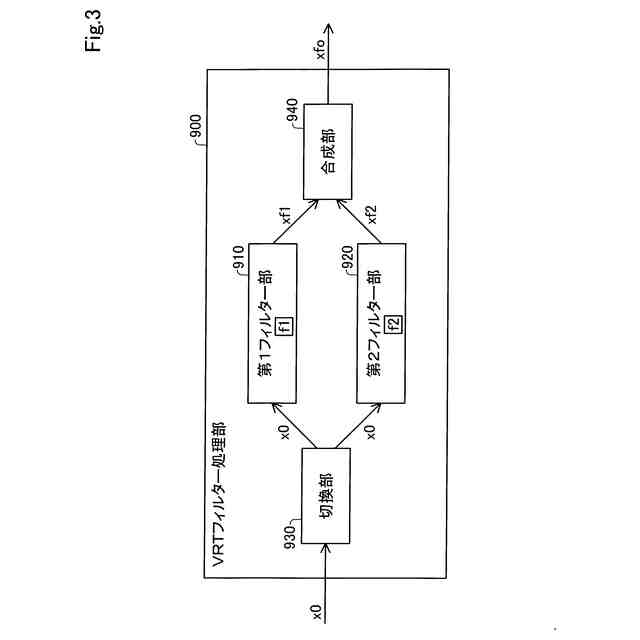
【解決手段】ロボットは、アームとモーターと制御部を備える。制御部は、位置指令を生成する指令生成部と、位置指令をフィルター処理してフィルター済み指令を生成するフィルター処理部と、フィルター済み指令を用いてモーターの駆動信号を生成する駆動信号生成部と、を備える。フィルター処理部は、位置指令に基づく信号に対して第1対象周波数の成分を低減する処理を行って、第1指令を生成する第1フィルター部と、位置指令に基づく信号に対して第2対象周波数の成分を低減する処理を行って、第2指令を生成する第2フィルター部と、指令生成部が生成した位置指令を、第1フィルター部と第2フィルター部とに、選択的に入力する切換部と、第1指令に基づく信号と第2指令に基づく信号の和を用いてフィルター済み指令を生成する合成部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットであって、
アームと、
前記アームを駆動するモーターと、
前記モーターを制御する制御部と、を備え、
前記制御部は、
位置指令を生成する指令生成部と、
前記位置指令をフィルター処理してフィルター済み指令を生成するフィルター処理部と、
前記フィルター済み指令を用いて前記モーターの駆動信号を生成する駆動信号生成部と、を備え、
前記フィルター処理部は、
前記位置指令に基づく信号に対して第1対象周波数の成分を低減する処理を行って、第1指令を生成する第1フィルター部と、
前記位置指令に基づく信号に対して第2対象周波数の成分を低減する処理を行って、第2指令を生成する第2フィルター部と、
前記指令生成部が生成した前記位置指令を、前記第1フィルター部と前記第2フィルター部とに、選択的に入力する切換部と、
前記第1指令に基づく信号と前記第2指令に基づく信号の和を用いて前記フィルター済み指令を生成する合成部と、を備える、ロボット。
続きを表示(約 1,500 文字)
【請求項2】
請求項1記載のロボットであって、
前記第1フィルター部は、前記第1対象周波数の成分を低減する第1帯域阻止フィルターと、第1ローパスフィルターと、を備え、
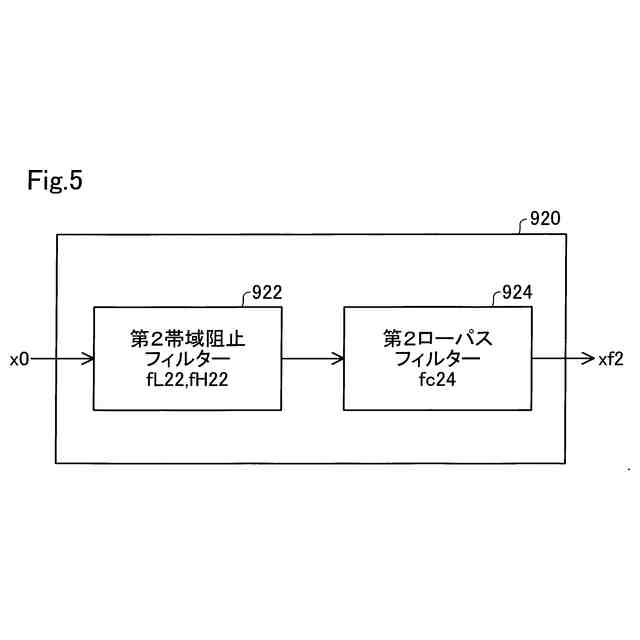
前記第2フィルター部は、前記第2対象周波数の成分を低減する第2帯域阻止フィルターと、第2ローパスフィルターと、を備える、ロボット。
【請求項3】
請求項2記載のロボットであって、
前記第1ローパスフィルターと前記第2ローパスフィルターは、互いに異なるカットオフ周波数を有する、ロボット。
【請求項4】
請求項2記載のロボットであって、
前記第1帯域阻止フィルターと前記第2帯域阻止フィルターは、互いに異なるカットオフ周波数を有する、ロボット。
【請求項5】
請求項1記載のロボットであって、
前記第1対象周波数と前記第2対象周波数として、前記ロボットの動作における共振周波数が設定されている、ロボット。
【請求項6】
請求項1記載のロボットであって、
前記切換部は、前記フィルター処理を切り替える旨の指示の入力に応じて、
前記第2フィルター部に、前記位置指令として0を入力し、前記第1フィルター部に、前記指令生成部が生成した前記位置指令を入力する処理と、
前記第1フィルター部に、前記位置指令として0を入力し、前記第2フィルター部に、前記指令生成部が生成した前記位置指令を入力する処理と、
を選択的に実行することにより、前記指令生成部が生成した前記位置指令の前記選択的な入力を行う、ロボット。
【請求項7】
モーターユニットであって、
モーターと、
前記モーターを制御する制御部と、を備え、
前記制御部は、
位置指令を生成する指令生成部と、
前記位置指令をフィルター処理してフィルター済み指令を生成するフィルター処理部と、
前記フィルター済み指令を用いて前記モーターの駆動信号を生成する駆動信号生成部と、を備え、
前記フィルター処理部は、
前記位置指令に基づく信号に対して第1対象周波数の成分を低減する処理を行って、第1指令を生成する第1フィルター部と、
前記位置指令に基づく信号に対して第2対象周波数の成分を低減する処理を行って、第2指令を生成する第2フィルター部と、
前記指令生成部が生成した前記位置指令を、前記第1フィルター部と前記第2フィルター部とに、選択的に入力する切換部と、
前記第1指令に基づく信号と前記第2指令に基づく信号の和を用いて前記フィルター済み指令を生成する合成部と、を備える、モーターユニット。
【請求項8】
請求項7記載のモーターユニットであって、
前記第1フィルター部は、前記第1対象周波数の成分を低減する第1帯域阻止フィルターと、第1ローパスフィルターと、を備え、
前記第2フィルター部は、前記第2対象周波数の成分を低減する第2帯域阻止フィルターと、第2ローパスフィルターと、を備える、モーターユニット。
【請求項9】
請求項8記載のモーターユニットであって、
前記第1ローパスフィルターと前記第2ローパスフィルターは、互いに異なるカットオフ周波数を有する、モーターユニット。
【請求項10】
請求項8記載のモーターユニットであって、
前記第1帯域阻止フィルターと前記第2帯域阻止フィルターは、互いに異なるカットオフ周波数を有する、モーターユニット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット、モーターユニット、およびロボットの制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、ロボットの振動を低減する技術が存在する。特許文献1の技術においては、電動モーターの目標モータートルク、被動回転部材に作用しているトータルの入力トルクの計測値、トーションバーのねじれの弾性変形によって発生する弾性力トルクの計測値などにローパス特性のフィルタリング処理が施される。その結果、被動回転部材に伝達される駆動トルクの振動を効果的に抑制しつつ、被動回転部材に付与される実際の駆動トルクを、目標駆動トルクに制御できる。
【0003】
ここで、特許文献1の技術において、ロボットの振動特性が動作の途中で変わることが考えられる。たとえば、ロボットの姿勢が変化した場合や、ロボットが把持している対象物の重量が動作中に変化した場合には、ロボットの振動特性が動作の途中で変わる。そのような場合には、ロボットにおいて低減すべき振動の周波数が変化する。
【先行技術文献】
【特許文献】
【0004】
特開2011-115878号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本開示の技術の発明者は、ロボットの動作途中で低減すべき振動の周波数を切り替えることができるフィルター処理について検討した。しかし、IIR((Infinite Impulse Response))フィルターにおいて、低減すべき振動の周波数の切り替えを動作中に行うと、周波数を切り替えるタイミングで不連続な位置ずれが発生し、ロボットの制御には適用できない。
【課題を解決するための手段】
【0006】
本開示は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態として実現することが可能である。
【0007】
本開示の一形態によれば、ロボットが提供される。このロボットは、アームと、前記アームを駆動するモーターと、前記モーターを制御する制御部と、を備える。前記制御部は、位置指令を生成する指令生成部と、前記位置指令をフィルター処理してフィルター済み指令を生成するフィルター処理部と、前記フィルター済み指令を用いて前記モーターの駆動信号を生成する駆動信号生成部と、を備える。前記フィルター処理部は、前記位置指令に基づく信号に対して第1対象周波数の成分を低減する処理を行って、第1指令を生成する第1フィルター部と、前記位置指令に基づく信号に対して第2対象周波数の成分を低減する処理を行って、第2指令を生成する第2フィルター部と、前記指令生成部が生成した前記位置指令を、前記第1フィルター部と前記第2フィルター部とに、選択的に入力する切換部と、前記第1指令に基づく信号と前記第2指令に基づく信号の和を用いて前記フィルター済み指令を生成する合成部と、を備える。
【図面の簡単な説明】
【0008】
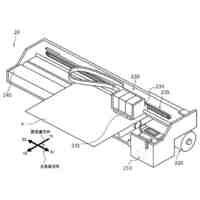
一実施形態におけるロボットシステムを示す説明図である。
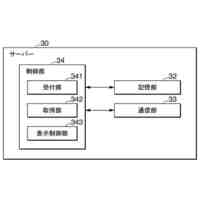
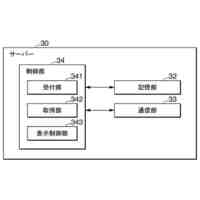
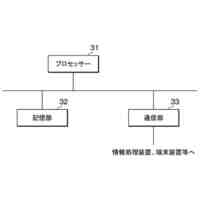
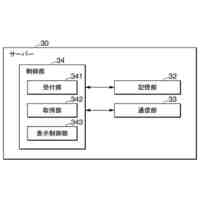
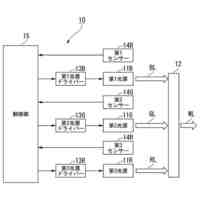
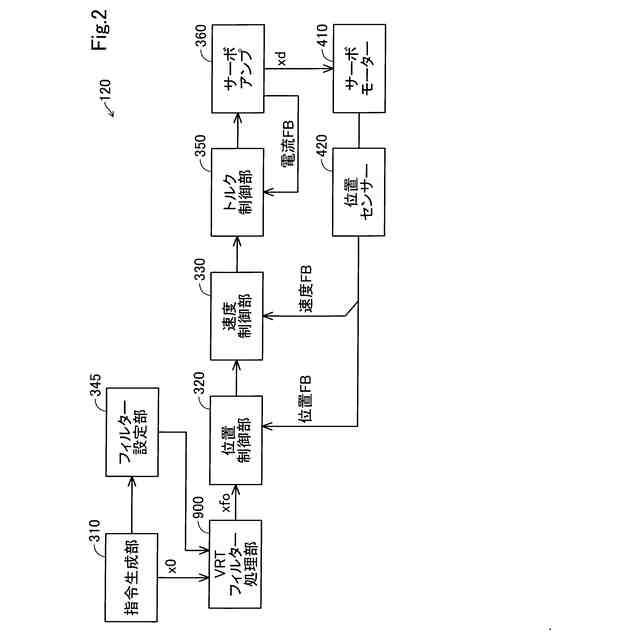
ロボット制御装置300の構成要素と、ロボット100の構成要素と、の関係を示すブロック図である。
VRTフィルター処理部900の構成を示すブロック図である。
第1フィルター部910の構成を示すブロック図である。
第2フィルター部920の構成を示すブロック図である。
ロボット制御装置300において実行される処理を説明するためのフローチャートである。
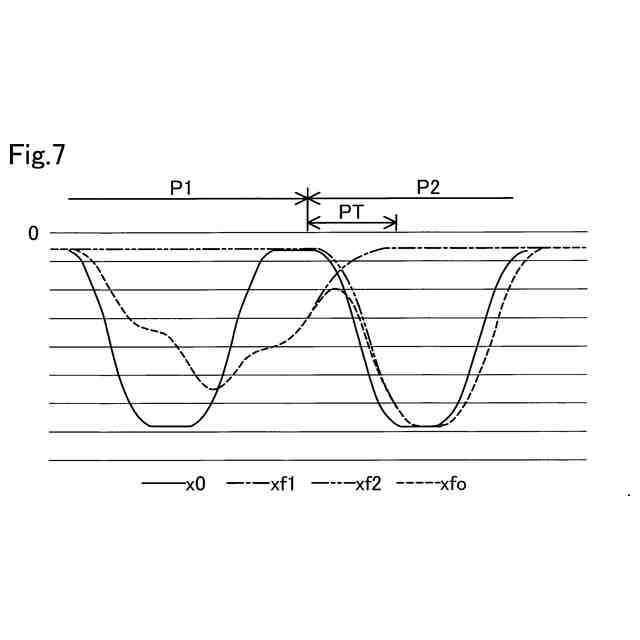
横軸を時間とし、縦軸をサーボモーター410の出力軸の角度位置とする、グラフである。
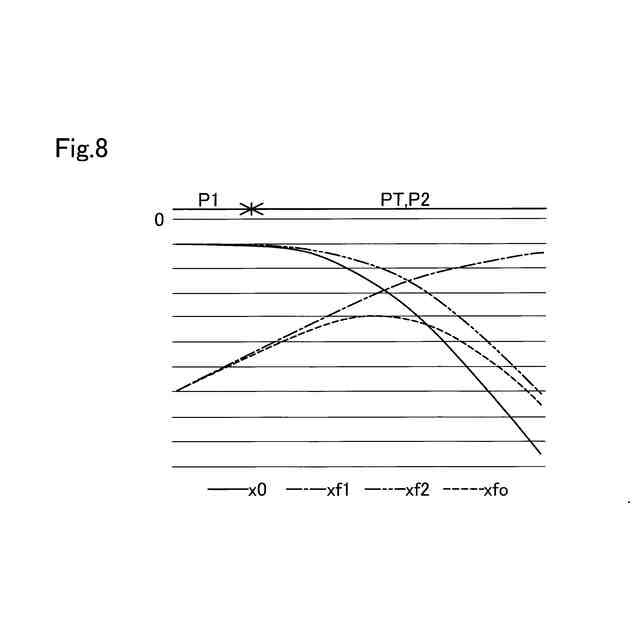
横軸を時間とし、縦軸をサーボモーター410の出力軸の角度位置とする、グラフである。
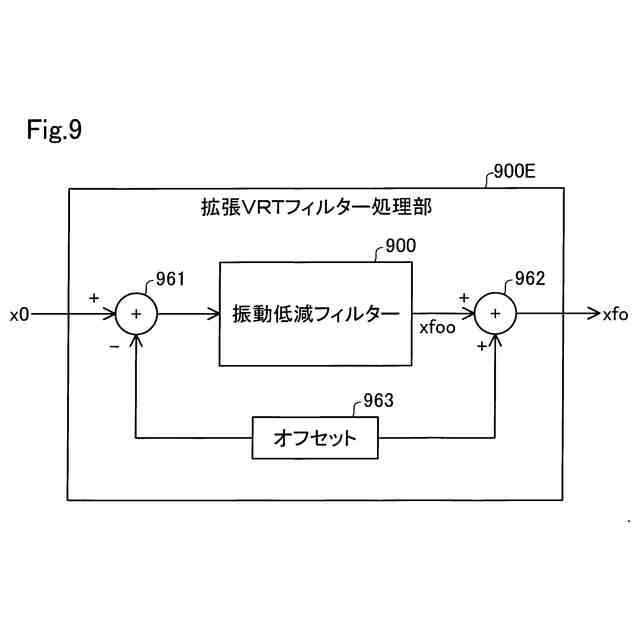
第2実施形態における拡張VRTフィルター処理部900Eの一例を示すブロック図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
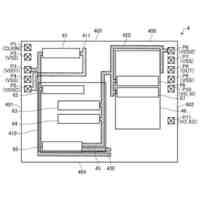
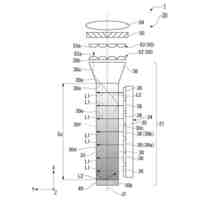
図1は、一実施形態におけるロボットシステムを示す説明図である。本実施形態のロボットシステムは、ロボット100と、エンドエフェクター200と、ロボット制御装置300と、ロボット教示装置600とを備える。
【0010】
ロボット100は、6個の回転関節X11~X16を備えたアーム110を有する6軸ロボットである。関節X11,X14,X16は、ねじり関節である。関節X12,X13,X15は、曲げ関節である。ロボット100のアーム110は、6個の関節X11~X16をそれぞれサーボモーター410で回転させることにより、駆動される。その結果、アーム110の先端部に取りつけられたエンドエフェクター200は、3次元空間中の指定された位置に指定された姿勢で配されることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
記録装置
4日前
セイコーエプソン株式会社
記録装置
6日前
セイコーエプソン株式会社
印刷装置
6日前
セイコーエプソン株式会社
液体吐出装置
7日前
セイコーエプソン株式会社
液体吐出装置
7日前
セイコーエプソン株式会社
繊維処理方法
4日前
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
成形管理システム
今日
セイコーエプソン株式会社
記録方法及び記録装置
6日前
セイコーエプソン株式会社
記録方法及び記録装置
6日前
セイコーエプソン株式会社
電気光学装置の製造方法
1日前
セイコーエプソン株式会社
集積回路装置及び発振器
今日
セイコーエプソン株式会社
三次元造形物の製造方法
今日
セイコーエプソン株式会社
可動装置およびロボット
4日前
セイコーエプソン株式会社
液体処理装置、及び分離膜
4日前
セイコーエプソン株式会社
照明装置及び波長変換素子
6日前
セイコーエプソン株式会社
生体物質抽出用磁性ビーズ
1日前
セイコーエプソン株式会社
電気光学装置および電子機器
1日前
セイコーエプソン株式会社
ドライバー及び電気光学装置
6日前
セイコーエプソン株式会社
電気光学装置および電子機器
4日前
セイコーエプソン株式会社
電気光学装置および電子機器
1日前
セイコーエプソン株式会社
電気光学装置および電子機器
4日前
セイコーエプソン株式会社
光源装置及びプロジェクター
今日
セイコーエプソン株式会社
光源装置およびプロジェクター
4日前
セイコーエプソン株式会社
電気光学装置、および電子機器
4日前
セイコーエプソン株式会社
光源装置およびプロジェクター
4日前
セイコーエプソン株式会社
複合体および複合体の製造方法
4日前
セイコーエプソン株式会社
光源装置、およびプロジェクター
6日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ