TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127100
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024023620
出願日
2024-02-20
発明の名称
容器搬送装置
出願人
靜甲株式会社
代理人
個人
主分類
B65G
47/24 20060101AFI20250825BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】 横倒姿勢にある透明又は半透明のボトル状容器の搬送を安定して行いつつ、ボトル状容器の良好な撮像結果を得て、ピックアップ用のロボットによる所望の姿勢での他所への移載を確実なものとする。
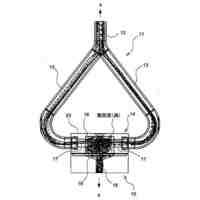
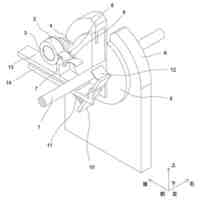
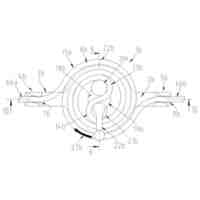
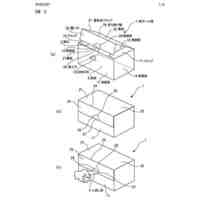
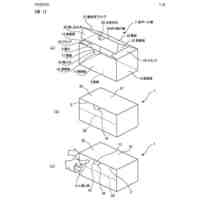
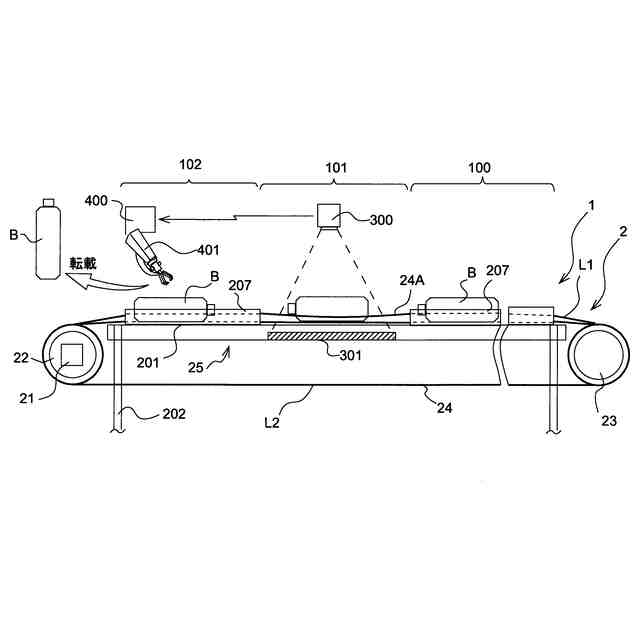
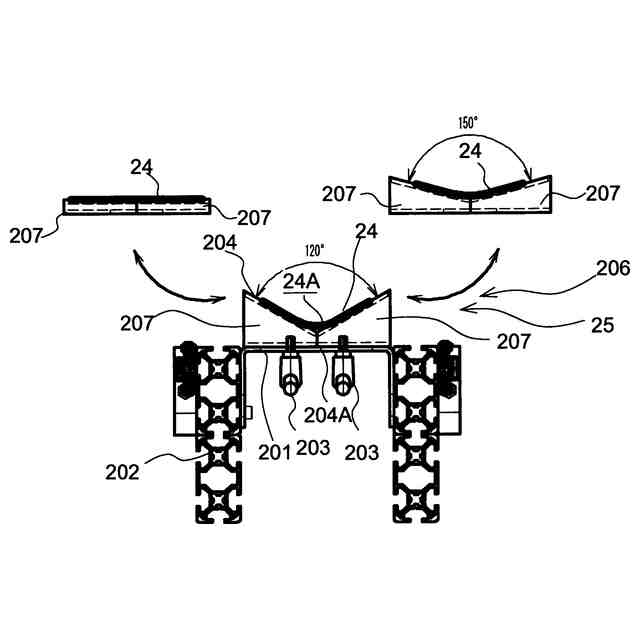
【解決手段】 ボトル状容器Bの供給領域100、撮像領域101、移載領域102が順に並ぶ搬送経路L1の前記撮像領域を101除く領域に、搬送経路L1を走行するコンベアベルト24に圧接して、コンベアベルト24を変形させ、幅方向に横倒姿勢のボトル状容器Bを収納するV字凹状の変形部24Aを形成しつつ、コンベアベルト24の走行をガイドするトラフ状ガイド手段25を設ける。
【選択図】 図1
特許請求の範囲
【請求項1】
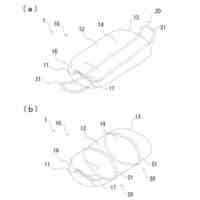
駆動側と従動側との一対のプーリ間に掛け渡され、ボトル状容器を搬送する搬送経路並びに戻り搬送経路を循環走行する、可撓性のシート材からなるコンベアベルトを有し、ボトル軸を前記コンベアベルトの走行方向に沿わせて配置した横倒姿勢のボトル状容器を、前記搬送経路上の上流に配置された供給領域において、前記コンベアベルトの載置面に載置して搬送するコンベア装置と、
前記搬送経路上に配置された撮像領域において、前記コンベアベルトで搬送される透明または半透明のボトル状容器を前記搬送経路の上方から撮像するカメラを有する撮像装置と、
前記カメラの撮像結果に基づき、前記ボトル状容器を前記搬送経路における前記撮像領域より下流に配置された移載領域においてピックアップし、所望の姿勢で他所へ移載するロボットと、を備え、
前記コンベア装置は、
前記搬送経路の前記撮像領域を除く領域において前記搬送経路を走行する前記コンベアベルトに圧接し、前記コンベアベルトを変形させ、前記コンベアベルトの幅方向に横倒姿勢のボトル状容器を収納するV字凹状の変形部を形成しつつ、前記コンベアベルトの走行をガイドする、トラフ状ガイド手段を有していることを特徴とする容器搬送装置。
続きを表示(約 610 文字)
【請求項2】
前記コンベアベルトは光透過性素材からなり、前記撮像装置は、前記撮像領域における前記搬送経路の裏面側から光照射可能に配設されたバックライトを有することを特徴とする請求項1に記載の容器搬送装置。
【請求項3】
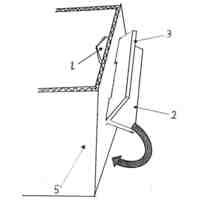
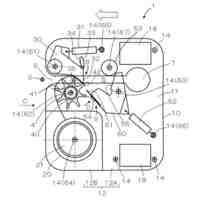
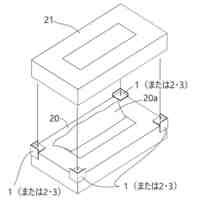
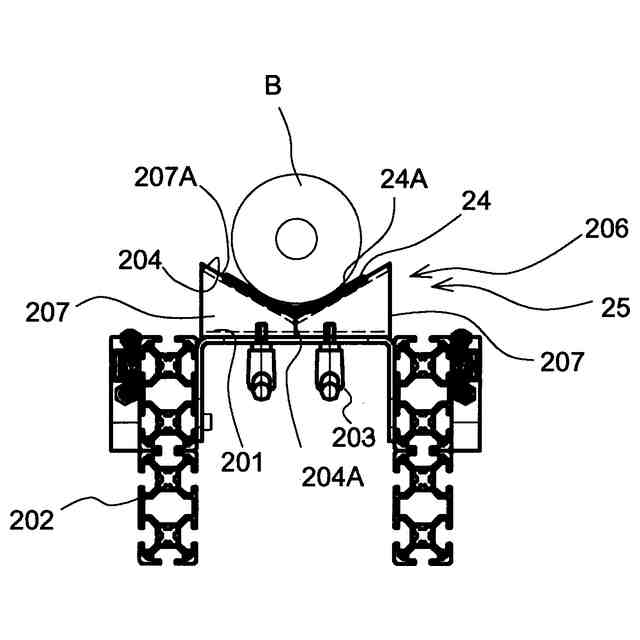
前記トラフ状ガイド手段は、前記コンベアベルトの搬送経路の裏面側で前記搬送経路に沿って配設された取付台と、前記搬送経路の前記撮像領域を除く領域において前記取付台に配設され、上面に前記V字凹状の変形部を象る凹部が形成される走行ガイド部材とを有することを特徴とする請求項1に記載の容器搬送装置。
【請求項4】
前記走行ガイド部材は、前記V字凹状の変形部の底頂部に対応する前記走行方向に沿った仮想線の線対称位置で前記取付台に配設される一対のガイドパーツからなり、前記一対のガイドパーツの上面は互いに指向する傾斜面とされ、両傾斜面を用いて前記凹部を形成するように構成されていることを特徴とする請求項3に記載の容器搬送装置。
【請求項5】
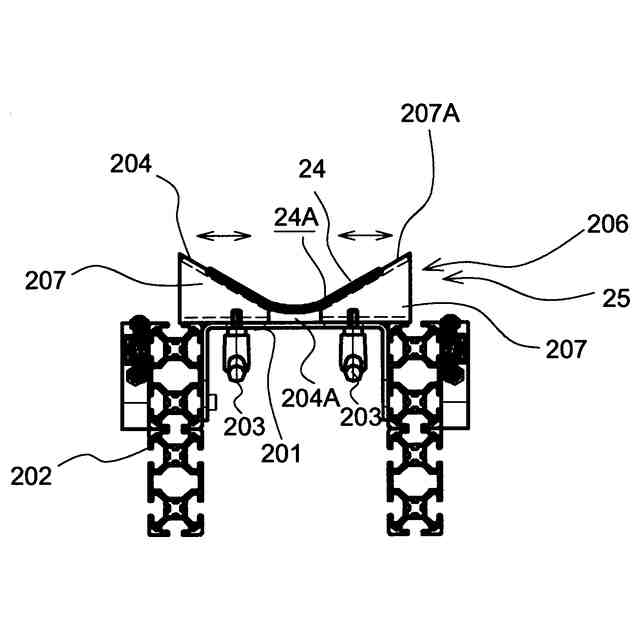
前記一対のガイドパーツは、前記走行方向に沿った仮想線の線対称位置で離接可能に前記取付台に配設されていることを特徴とする請求項4に記載の容器搬送装置。
【請求項6】
前記走行ガイド部材はボトル状容器の形状に応じて交換可能に配設されていることを特徴とする請求項3乃至請求項5のいずれか1項に記載の容器搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ボトル軸を一定方向に配置した横倒姿勢でコンベア上を搬送される透明乃至半透明のボトル状容器を撮像し、その撮像結果に基づき、ピックアップロボットで前記ボトル状容器を追従しながら把持し、立位姿勢などの所望の姿勢に変えて他所に載置し直す、容器搬送装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
前述のような容器搬送装置において、ピックアップロボットの作動領域へワークとしてのボトル状容器を搬送する際、搬送方向において個々のボトル状容器を切り離すことや撮像位置からピックアップロボットによってピックアップするまでの間での容器の転がりを防止することが肝要である。
【0003】
また、ボトル状容器が透明乃至半透明の場合、その撮像の安定化、換言すれば、姿勢と位置検出のための撮像のクオリティ維持の為には、バックライトによる背面側からの照明を用いた撮像(シャドウ撮像)でエッジ(輪郭)を強調させることが、形状把握の為には望ましい。
【0004】
前述のような、搬送方向における個々のボトル状容器の切り離しについては、例えば、複数基のベルトコンベアを並列配置させつつ速度差を設けて走行させる方法など、様々な方法や装置が公知となっている。
【0005】
そして、撮像位置からピックアップロボットによるピックアップ位置までの間での容器の転がり防止については、ベルトコンベアの搬送面に粘着性を有するものを用いたり、ベルトコンベアの表面に転がり防止用の桟や突起などの部材を設けることがなされていた(特許文献1,2,3参照。)
【先行技術文献】
【特許文献】
【0006】
特開2021-042039号公報
特開2006-089235号公報
特開2018-144184号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、撮像時にコンベアベルトに設けた転がり防止用の部材までが影として写り込むと撮像の精度を著しく損ない、ボトル状容器の上下(キャップが配設される口部の形成側をボトル軸方向における上方向、反対側の底部をボトル軸方向における下方向とする)の判別がし難くなってピックアップロボットが誤動作することも考えられる。
【0008】
そこで、本発明は、横倒姿勢にある、透明又は半透明のボトル状容器の搬送を安定して行いつつ、前記ボトル状容器を良好な撮像結果を得られる条件下で撮像可能であり、ピックアップロボットによる、所望の姿勢での他所への移載を確実なものとすることができる容器搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
前述した目的を達成するため、本願発明の容器搬送装置は、駆動側と従動側との一対のプーリ間に掛け渡され、ボトル状容器を搬送する搬送経路並びに戻り搬送経路を循環走行する、可撓性のシート材からなるコンベアベルトを有し、ボトル軸を前記コンベアベルトの走行方向に沿わせて配置した横倒姿勢のボトル状容器を、前記搬送経路上の上流に配置された供給領域において前記コンベアベルトの載置面に載置して搬送するコンベア装置と、前記搬送経路上に配置された撮像領域において、前記コンベアベルトで搬送されるボトル状容器を前記搬送経路の上方から撮像するカメラを有する撮像装置と、前記カメラの撮像結果に基づき、前記ボトル状容器を前記搬送経路における前記撮像領域より下流に配置された移載領域においてピックアップし、所望の姿勢で他所へ移載するロボットと、を備え、前記コンベア装置は、前記搬送経路の前記撮像領域を除く領域において前記搬送経路を走行する前記コンベアベルトに圧接し、前記コンベアベルトを変形させ、前記コンベアベルトの幅方向に横倒姿勢のボトル状容器を収納するV字凹状の変形部を形成しつつ、前記コンベアベルトの走行をガイドする、トラフ状ガイド手段を有していることを特徴とする。
【0010】
この構成を備える本発明の容器搬送装置は、搬送経路における撮像領域を除く領域、ずなわち、搬送経路の上流側のボトル状容器の供給領域から撮像領域まで、そして、撮像領域から搬送経路の下流側の移載領域までに配設されたトラフ状ガイド手段により、前記トラフ状ガイド手段が配設された領域を走行中の前記コンベアベルトにはV字凹状の変形部が形成されるので、ボトル状容器をその変形部内に収納するようにすればボトル状容器がコンベアベルトの幅方向へ転がってしまうことを防止することができる。V字凹状の変形部が形成されていない撮像領域においては、搬送経路を走行するコンベアベルトは搬送領域の上流側に配設されたトラフ状ガイド手段と、下流側に配設されたトラフ状ガイド手段との間を懸架された状態で走行し、V字凹状の変形部の形状は保たれている。よって、撮像領域におけるボトル状容器の撮像時には、コンベアベルトとボトル状容器以外の転がり防止用の部材等が入り込むことを防止することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
靜甲株式会社
高圧損発生ユニット並びに充填装置
3か月前
靜甲株式会社
モデル画像登録方法、画像処理方法、並びに、容器搬送装置
2か月前
個人
収容箱
4か月前
個人
束ね具
1か月前
個人
コンベア
6か月前
個人
ゴミ収集器
8か月前
個人
段ボール箱
8か月前
個人
段ボール箱
8か月前
個人
容器
10か月前
個人
バンド
3か月前
個人
テープ引出機
1か月前
個人
楽ちんハンド
6か月前
個人
土嚢運搬器具
10か月前
個人
宅配システム
8か月前
個人
角筒状構造体
7か月前
個人
コード類収納具
9か月前
個人
閉塞装置
11か月前
個人
棒状体収容容器
1か月前
個人
お薬の締結装置
7か月前
個人
包装容器
2か月前
個人
廃棄物収容容器
4か月前
個人
ゴミ処理機
10か月前
株式会社バンダイ
物品
2か月前
個人
蓋閉止構造
5か月前
株式会社和気
包装用箱
10か月前
個人
蓋閉止構造
5か月前
個人
把手付米袋
6か月前
個人
積み重ね用補助具
4か月前
株式会社和気
包装用箱
1か月前
株式会社コロナ
梱包材
7か月前
個人
貯蔵サイロ
8か月前
三甲株式会社
蓋体
9か月前
個人
袋入り即席麺
8か月前
株式会社KY7
封止装置
4か月前
三甲株式会社
蓋体
11か月前
三甲株式会社
容器
7か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ