TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025120028
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2024015218
出願日
2024-02-02
発明の名称
航路計画システム及び航路計画方法
出願人
古野電気株式会社
代理人
主分類
G08G
3/02 20060101AFI20250807BHJP(信号)
要約
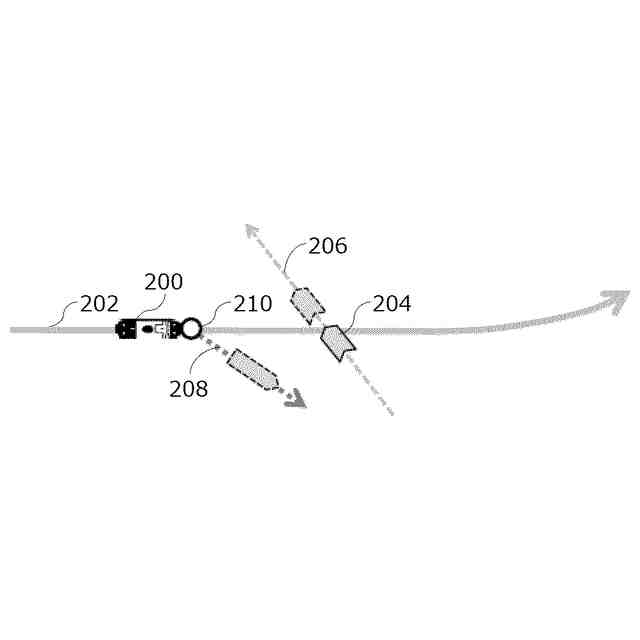
【課題】 船舶等の移動体が複数の他船当の障害物との衝突を避航し、安全に航行できる航路計画装置及び方法を提供する。
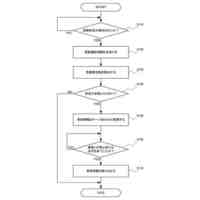
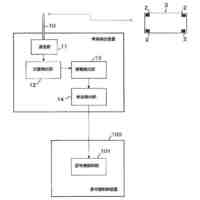
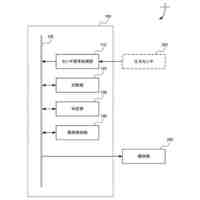
【解決手段】 水上を移動する移動体の目的地までの航路を計画する航路計画システムであって、移動体の計画航路を示す計画航路情報を取得する計画航路情報取得部と、移動体の位置、移動方向、及び速度を含む移動体情報を取得する移動体情報取得部と、移動体の周辺にある1又は複数の障害物の位置、移動方向、及び速度を含む障害物情報を取得する障害物情報取得部と、移動体情報と障害物情報に基づいて移動体と障害物の衝突のリスクを示す衝突リスク値を算出する衝突リスク値算出部と、衝突リスク値に基づいて移動体が避航する必要があるかを判断し避航が必要と判断した場合、計画航路から外れた経路であってその避航終点の方位があらかじめ定める終点方位となる避航経路を設定する避航経路設定部と、を備える航路計画システムが提供される。
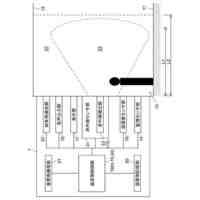
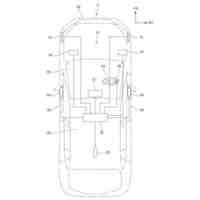
【選択図】 図1
特許請求の範囲
【請求項1】
水上を移動する移動体の目的地までの航路を計画する航路計画システムであって、
前記移動体の計画航路を示す計画航路情報を取得する計画航路情報取得部と、
前記移動体の位置、移動方向、及び速度を含む移動体情報を取得する移動体情報取得部と、
前記移動体の周辺にある1又は複数の障害物の位置、移動方向、及び速度を含む障害物情報を取得する障害物情報取得部と、
前記移動体情報と前記障害物情報に基づいて、前記移動体と前記障害物の衝突のリスクを示す衝突リスク値を算出する衝突リスク値算出部と、
前記衝突リスク値に基づいて前記移動体が避航する必要があるかを判断し、避航が必要と判断した場合、前記計画航路から外れた経路であってその避航終点の方位があらかじめ定める終点方位となる避航経路を設定する避航経路設定部と、
を備える航路計画システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の航路計画システムであって、
前記終点方位は、前記移動体が前記計画航路から避航を開始する避航開始位置において、前記移動体の移動方向に一致する方位、
である航路計画システム。
【請求項3】
請求項1に記載の航路計画システムであって、
前記終点方位は、前記移動体が未航行の前記計画航路上の選定された選定位置における方向に一致する方位、
である航路計画システム。
【請求項4】
請求項1に記載の航路計画であって、
前記終点方位は、前記移動体が前記計画航路から避航を開始する避航開始位置から、前記目的地に向かう方向に一致する方位、
である航路計画システム。
【請求項5】
請求項1に記載の航路計画であって、
前記終点方位は、前記計画航路上で前記移動体の未航行航路のうち選定された位置に向かう方向に一致する方位、
である航路計画システム。
【請求項6】
請求項1乃至請求項5のいずれかの請求項に記載の航路計画システムであって、
避航経路設定部は、
前記避航開始位置と前記避航終点との間に、1つ又は複数のポテンシャル避航経路パターンを生成する避航経路パターン生成部と、
衝突リスク値算出部により算出された前記1または複数のポテンシャル避航経路パターンのそれぞれに対する衝突リスク値に基づいて、前記1又は複数のポテンシャル避航経路パターンから避航経路を選択する避航経路選択部と、
を備える航路計画システム。
【請求項7】
請求項6に記載の航路計画システムであって、
前記衝突リスク値が最小のポテンシャル避航経路パターンを前記避航経路に選択する航路計画システム。
【請求項8】
請求項6に記載の航路計画システムであって、さらに、
前記1又は複数のポテンシャル避航経路パターンに沿って前記移動体が航行した場合の前記避航開始点と前記避航終点の間の避航距離をそれぞれ算出する避航経路距離算出部を備え、
前記避航経路選択部は、前記1又は複数のポテンシャル避航経路パターンの前記衝突リスク値と前記避航距離とに基づいて、該1又は複数のポテンシャル避航経路パターンから前記避航経路を選択する、
航路計画システム。
【請求項9】
請求項8に記載の航路計画システムであって、
前記避航経路設定部は、
前記1または複数のポテンシャル避航経路パターンを前記移動体が航行した場合の障害となる前記障害物から、最大の衝突リスク値に対応する最大衝突リスク障害物をそれぞれ抽出し、
最大衝突リスク障害物の最大衝突リスク値が所定の衝突リスク閾値以下であるポテンシャル避航経路パターンを選択し、
選択した前記複数のポテンシャル避航経路パターンから、前記衝突リスク値と前記避航距離に基づいてポテンシャル避航経路パターンから前記避航経路を選択する、
航路計画システム。
【請求項10】
請求項1乃至請求項5のいずれかの請求項に記載の航路計画システムであって、さらに、
前記移動体と前記複数の障害物からの各障害物との衝突リスク値に基づいて、前記複数の障害物に同時に接近する程度を示す輻輳リスク値を算出する輻輳リスク値算出部を備え、
前記避航経路設定部は、前記衝突リスク値に加え前記輻輳リスク値に基づいて前記移動体が避航する必要があるかを判断し、前記避航要否判断部が避航の必要を判断した場合、前記避航経路を設定する、
航路計画システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、主として船舶を安全に航行するための海上航行システムに関するものであり、より具体的には、周囲の障害物との衝突を避航して船舶を安全に航行するための航路計画システム及び航路計画方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
一般に、船舶等の移動体は、航行を開始する前に出発地又は出港場所から目的地(目的の港)までの計画航路を設定する。近年、移動体は設定された計画航路を安全に航行するために、計画航路上を移動する移動体を監視するナビゲーションシステム及び装置を備えている。従来のナビゲーションシステム等は、他船などの障害物を避航するために計画航路上の自船の近傍にある障害物及び移動体など他の船舶の位置を追跡し識別するために、移動体情報及び障害物情報を取得するための複数のセンサ部を使用する。
【0003】
しかしながら、計画航路上の航行中に、上記障害物等や計画航路を横切る他の船舶の出現等の人為的要因により、計画航路を変更しなければならない状況が起こり得る。また、海況の急激な変化、潮の満ち引き、その他の外乱要因等の自然的要因により、計画航路からの航行経路の変更を余儀なくされる場合がある。
【0004】
このようなことから、船舶の航行要員は障害物や船舶との衝突を避航し、船舶のような移動体を計画航路に沿って安全に航行するための支援を必要とする。
【先行技術文献】
【特許文献】
【0005】
US2020/0310434
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の航路計画システム及び航路計画方法は、船舶の移動体を航行させる要員が障害物や他の船舶との衝突を避航して移動体を安全に航行することを支援するシステム及び方法を提供することを課題とする。
【課題を解決するための手段】
【0007】
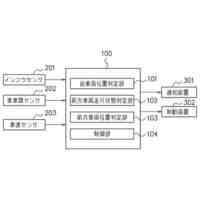
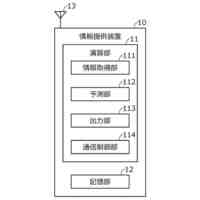
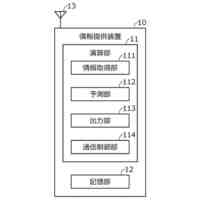
本発明の航路計画システム及び航路計画方法は、上記の課題を解決するためになされたものであり、水上を移動する移動体の目的地までの航路を計画するにために、移動体(自船)の計画航路を示す計画航路情報を取得する計画航路情報取得部と、移動体の位置、移動方向、及び速度を含む移動体情報を取得する移動体情報取得部と、移動体の周辺にある1又は複数の障害物の位置、移動方向、及び速度を含む障害物情報を取得する障害物情報取得部と、を備えている。さらに、移動体情報と前記障害物情報に基づいて、移動体と障害物の衝突のリスクを示す衝突リスク値を算出する衝突リスク値算出部と、衝突リスク値に基づいて移動体が避航する必要があるかを判断し、避航が必要と判断した場合、計画航路から外れた経路であってその避航終点の方位があらかじめ定める終点方位となる避航経路を設定する避航経路設定部とを備えている。
【0008】
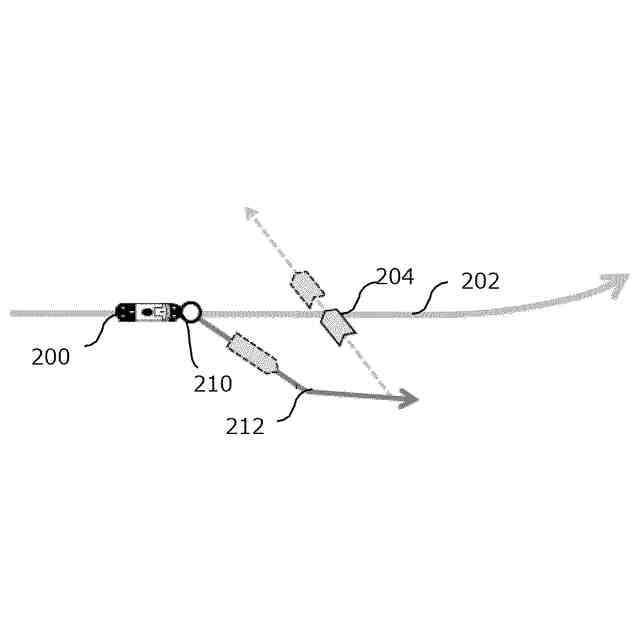
上記の本発明の航路計画システムにおいて、終点方位は移動体が計画航路から避航を開始する避航開始位置において移動体の移動方向に一致する方位としてもよいし、終点方位は移動体が未航行の計画航路上の選定された選定位置における方向に一致する方位としてもよい。この場合、終点の位置に最も近い未航行の計画航路上の位置における計画航路における方向を終点方位とすればよい。あるいは、避航開始点と終点までの直線距離に等しい、すなわち避航開始点を中心とする同心円の円周上の未航行の計画航路の位置における計画航路の方向を終点方位としてもよい。
【0009】
また、終点方位は移動体が計画航路から避航を開始する避航開始位置から目的地に向かう方向に一致する方位、又は終点方位は計画航路上で移動体の未航行航路のうち選定された位置に向かう方向に一致する方位とすることもできる。つまり、避航経路を計画航路から外れた経路とし、その終点位置が計画航路上になくても当該終点位置における方位をあらかじめ設定する方位にすればよいのである。
【0010】
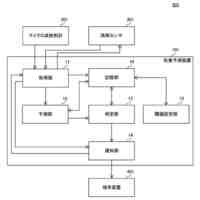
本発明の航路計画システムにおいて、避航経路設定部は、避航開始位置と避航終点との間に1つ又は複数のポテンシャル避航経路パターンを生成する避航経路パターン生成部と、衝突リスク値算出部により算出された1または複数のポテンシャル避航経路パターンのそれぞれに対する衝突リスク値に基づいて1又は複数のポテンシャル避航経路パターンから避航経路を選択する避航経路選択部とを備えるようにしてもよい。そして、上記のポテンシャル避航経路パターンから衝突リスク値が最小となるポテンシャル避航経路パターンを避航経路に選択するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
古野電気株式会社
気象予測装置、気象予測方法および気象予測プログラム
7日前
日本精機株式会社
警報システム
1か月前
株式会社SUBARU
車両
7日前
個人
自動電動車椅子
28日前
スズキ株式会社
運転支援装置
1か月前
エムケー精工株式会社
車両誘導装置
1か月前
個人
磁気路上での車両の路線離脱防御
17日前
ニッタン株式会社
検知器
14日前
株式会社国際電気
防災システム
1か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
1か月前
トヨタ自動車株式会社
車両
2か月前
日本信号株式会社
異常走行検出装置
21日前
大阪瓦斯株式会社
音声出力システム
13日前
株式会社SUBARU
運転支援装置
15日前
株式会社小糸製作所
移動体検出装置
1か月前
トヨタ自動車株式会社
サーバ
21日前
株式会社デンソー
運航管理装置
6日前
株式会社CCT
通信装置及び表示方法
14日前
日本精機株式会社
報知装置及び報知システム
27日前
三菱自動車工業株式会社
制御システム
13日前
株式会社小糸製作所
車両検出システム
1か月前
株式会社SUBARU
事故情報収集装置
7日前
株式会社 ミックウェア
車内環境制御システム
2日前
能美防災株式会社
火災感知器
1か月前
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
情報提供装置
2か月前
本田技研工業株式会社
情報提供装置
2か月前
ヨシモトポール株式会社
接近報知システム
1か月前
能美防災株式会社
非常伝達装置
1か月前
株式会社SUBARU
車室内異常検知装置
7日前
ホーチキ株式会社
火災検出システム
9日前
大阪瓦斯株式会社
音声出力装置
8日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ