TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112423
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006628
出願日
2024-01-19
発明の名称
船舶制御システム、および船舶
出願人
ヤマハ発動機株式会社
代理人
弁理士法人アルファ国際特許事務所
主分類
B63H
20/00 20060101AFI20250725BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】操船モードの指示の直後に船体が意図しない方向に移動したり回頭したりすることを抑制する。
【解決手段】船舶制御システムは、複数の船舶推進機と、船舶推進機の推力と舵角とを制御するコントローラと、操作を受け付ける操作装置と、船舶推進機の舵角を検知するセンサと、を備えり。コントローラは、操作装置が操船モードを指示する操作を受け付けた場合には、複数の船舶推進機のうちの少なくとも2つの船舶推進機の舵角について、互いの推力の打ち消し度合いが、操船モードの指示の前よりも大きい目標角度関係になるように少なくとも2つの船舶推進機のうちの少なくとも1つの舵角を、センサの検知結果に基づき変更する舵角変更処理と、少なくとも2つの船舶推進機の舵角が目標角度関係になったことを必要条件として、少なくとも2つの船舶推進機の推力を、操船モードに対応する推力に変更する推力変更処理と、を行う。
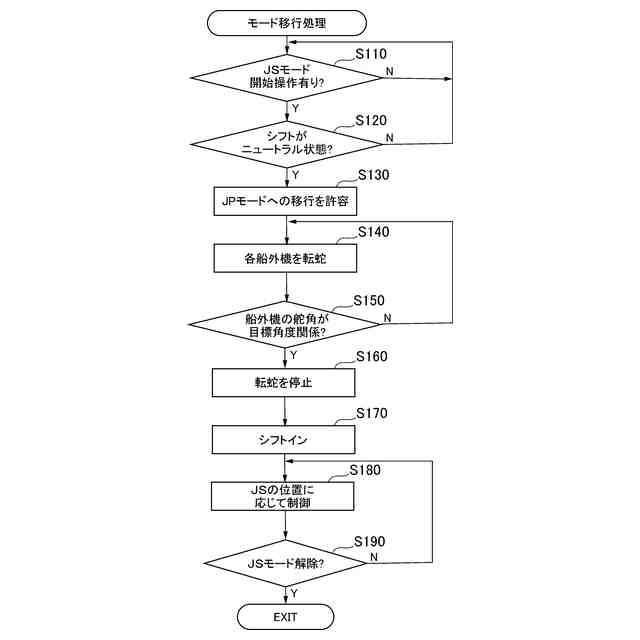
【選択図】図8
特許請求の範囲
【請求項1】
船体を有する船舶を制御するための船舶制御システムであって、
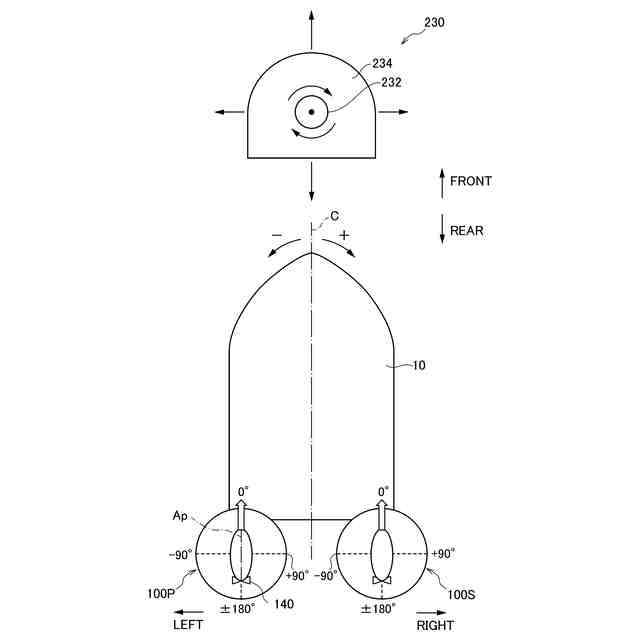
転舵軸線周りに180度以上の転舵が可能に構成された複数の船舶推進機と、
前記船舶推進機の推力と舵角とを制御するコントローラと、
操作を受け付ける操作装置と、
前記船舶推進機の舵角を検知するセンサと、
を備え、
前記コントローラは、
前記操作装置が操船モードを指示する操作を受け付けた場合には、前記複数の船舶推進機のうちの少なくとも2つの前記船舶推進機の舵角について、互いの推力の打ち消し度合いが、前記操船モードの指示の前よりも大きい目標角度関係になるように前記少なくとも2つの船舶推進機のうちの少なくとも1つの舵角を、前記センサの検知結果に基づき変更する舵角変更処理と、
前記少なくとも2つの船舶推進機の舵角が前記目標角度関係になったことを必要条件として、前記少なくとも2つの船舶推進機の推力を、前記操船モードに対応する推力に変更する推力変更処理と、を行う、
船舶制御システム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の船舶制御システムであって、
前記コントローラは、
前記推力変更処理において、前記少なくとも2つの船舶推進機をシフトオフ状態からシフトオン状態に変更する、
船舶制御システム。
【請求項3】
請求項1または請求項2に記載の船舶制御システムであって、
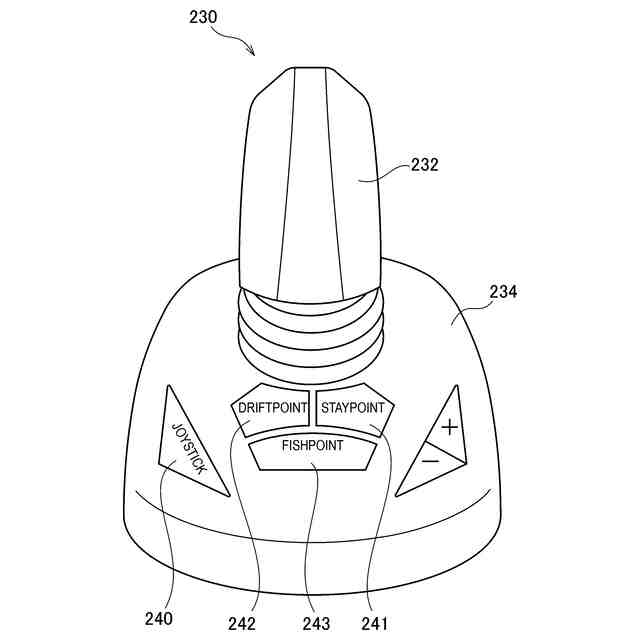
前記操作装置は、ジョイスティックを有しており、
前記操船モードは、前記ジョイスティックの操作に基づき前記船舶を制御するジョイスティックモードである、
船舶制御システム。
【請求項4】
請求項1から請求項3までのいずれか一項に記載の船舶制御システムであって、
前記目標角度関係は、前記少なくとも2つの船舶推進機の推力が互いに打ち消し合う舵角の関係である、
船舶制御システム。
【請求項5】
請求項1から請求項4までのいずれか一項に記載の船舶制御システムであって、
前記複数の船舶推進機が、
第1の船舶推進機と、
第2の船舶推進機と、
前記第1の船舶推進機と前記第2の船舶推進機との間に配された第3の船舶推進機と、を含み、
前記コントローラは、
前記舵角変更処理において、前記第1の船舶推進機および前記第2の船舶推進機のうち少なくとも一方の舵角を変更する、
船舶制御システム。
【請求項6】
請求項5に記載の船舶制御システムであって、
前記コントローラが、
前記舵角変更処理において、前記第3の船舶推進機を、前記船体が回頭している方向に転舵させる、
船舶制御システム。
【請求項7】
船体を有する船舶を制御するための船舶制御システムであって、
転舵軸線周りに転舵可能に構成された複数の船舶推進機と、
前記船舶推進機の推力と舵角とを制御するコントローラと、
操作を受け付ける操作装置と、
前記船舶推進機の舵角を検知するセンサと、
を備え、
前記コントローラは、
前記操作装置が操船モードを指示する操作を受け付けた場合には、前記複数の船舶推進機のうちの少なくとも2つの前記船舶推進機の舵角について、前記操船モードに対応する目標角度関係になるように前記少なくとも2つの船舶推進機のうちの少なくとも1つの舵角を、前記センサの検知結果に基づき変更する舵角変更処理と、
前記少なくとも2つの船舶推進機の舵角が前記目標角度関係になったことを必要条件として、前記少なくとも2つの船舶推進機の推力を、前記操船モードに対応する推力に変更する推力変更処理と、を行う、
船舶制御システム。
【請求項8】
請求項1から請求項7までのいずれか一項に記載の船舶制御システムであって、
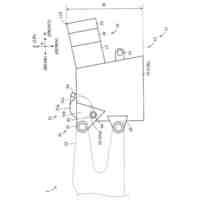
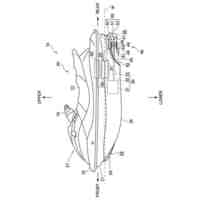
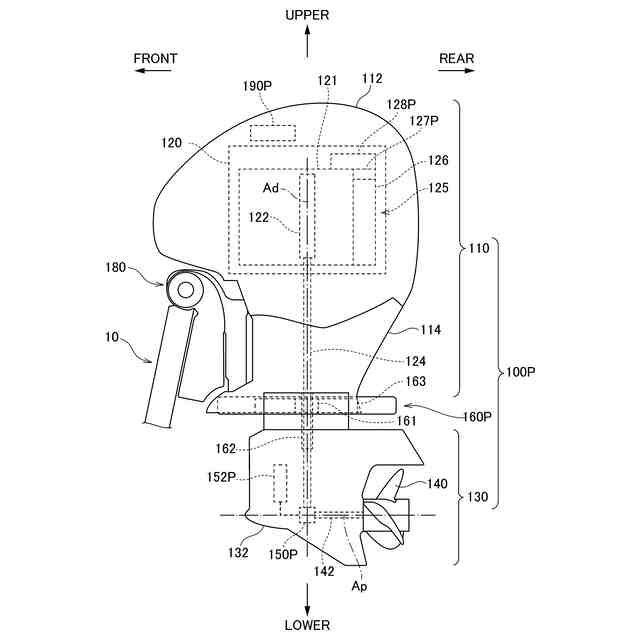
前記少なくとも2つの船舶推進機は、前記船体に固定されるアッパユニットと、プロペラを有し、前記アッパユニットの下方に配置され、かつ、前記アッパユニットに対して前記転舵軸線周りに回動するロワーユニットとを備える構成である、
船舶制御システム。
【請求項9】
船体と、
請求項1から請求項8までのいずれか一項に記載の船舶制御システムと、
備える船舶。
発明の詳細な説明
【技術分野】
【0001】
本明細書に開示される技術は、船舶制御システム、および船舶に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
複数の船舶推進機と、複数の船舶推進機のそれぞれの推力と舵角とを制御するコントローラと、を備えて船の移動を制御するためのシステムが知られている。例えば、選択された操船モードに対応する舵角およびシフト状態となるように、2つの船舶推進機のそれぞれの舵角およびシフト状態を制御するシステムが提案されている(特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2010-195388号公報
特開2018-79742号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
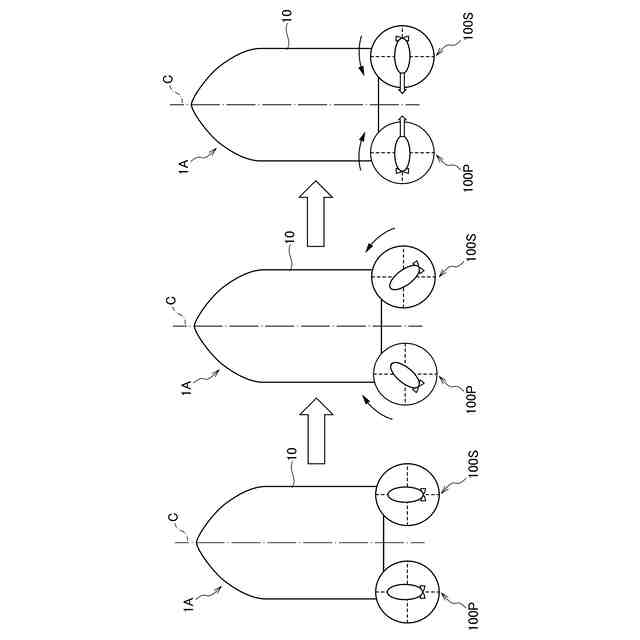
上記の従来技術では、2つの船舶推進機の舵角が、選択された操舵モードに対応する角度関係になる前に船舶推進機の推力(シフト状態)を変更する構成である。このため、操船モードの指示の直後に船体が一旦または一時的に意図しない方向に移動したり回頭したりするといった不具合が生じることがある。
【0005】
本明細書では、上述した課題を解決することが可能な技術を開示する。
【課題を解決するための手段】
【0006】
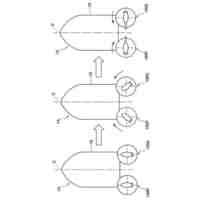
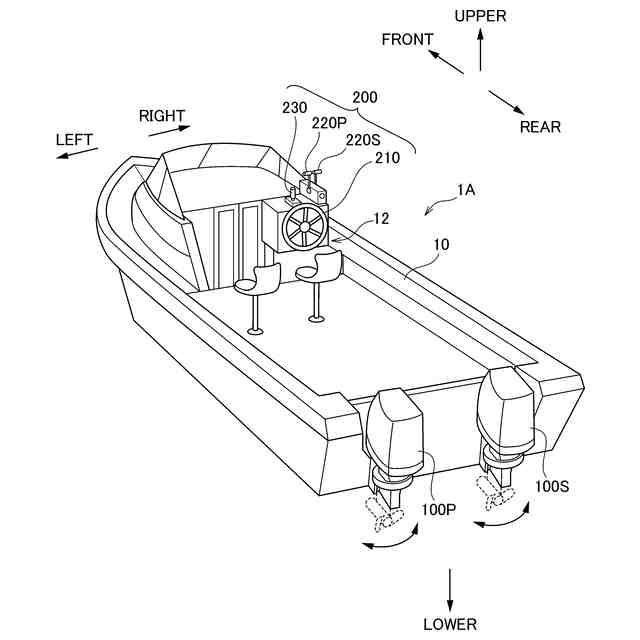
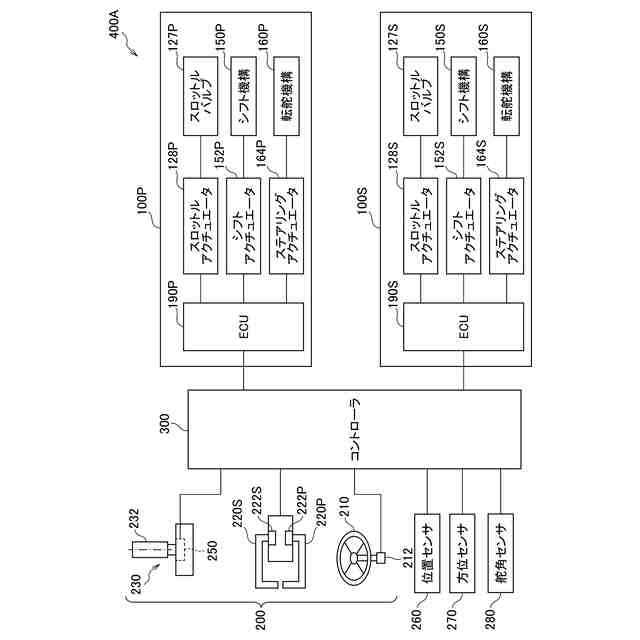
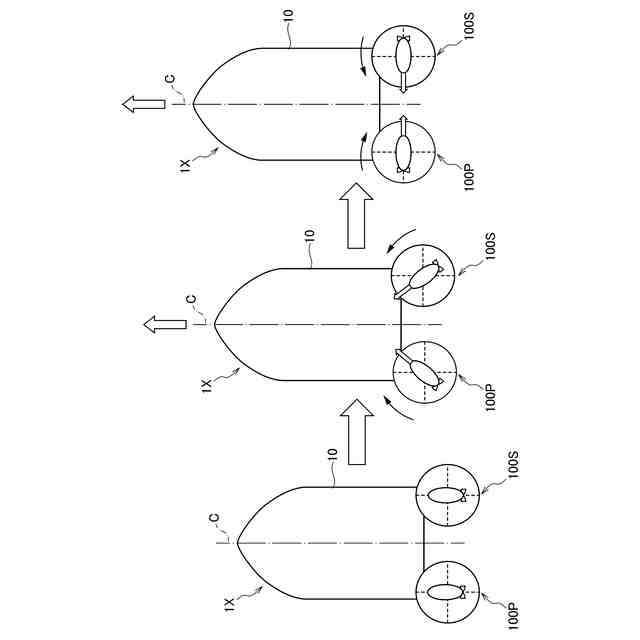
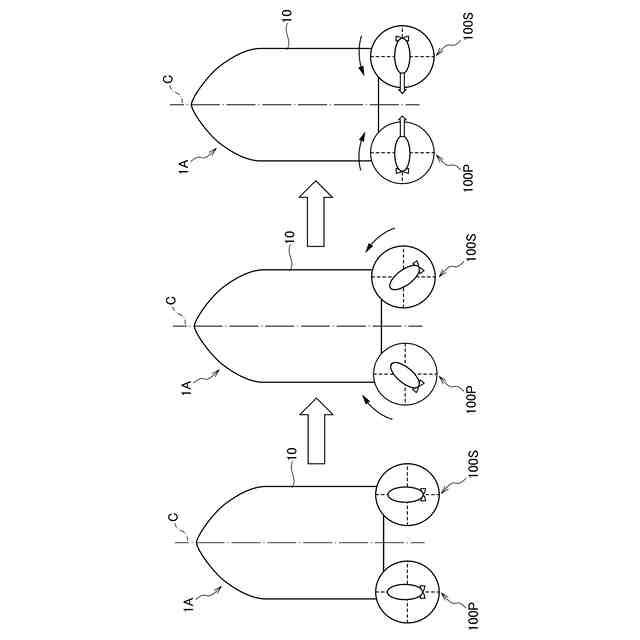
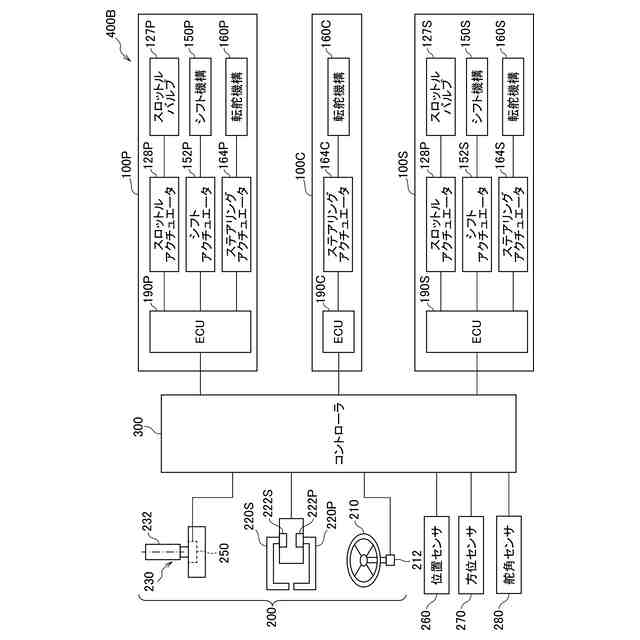
(1)本明細書に開示される船舶制御システムは、船体を有する船舶を制御するための船舶制御システムである。船舶制御システムは、転舵軸線周りに180度以上の転舵が可能に構成された複数の船舶推進機と、前記船舶推進機の推力と舵角とを制御するコントローラと、操作を受け付ける操作装置と、前記船舶推進機の舵角を検知するセンサと、を備える。前記コントローラは、前記操作装置が操船モードを指示する操作を受け付けた場合には、前記複数の船舶推進機のうちの少なくとも2つの前記船舶推進機の舵角について、互いの推力の打ち消し度合いが、前記操船モードの指示の前よりも大きい目標角度関係になるように前記少なくとも2つの船舶推進機のうちの少なくとも1つの舵角を、前記センサの検知結果に基づき変更する舵角変更処理と、前記少なくとも2つの船舶推進機の舵角が前記目標角度関係になったことを必要条件として、前記少なくとも2つの船舶推進機の推力を、前記操船モードに対応する推力に変更する推力変更処理と、を行う。本船舶の船舶制御システムによれば、例えば、少なくとも2つの船舶推進機の舵角が目標角度関係になる前に船舶推進機の推力を変更する構成に比べて、操船モードの指示の直後に船体が意図しない方向に移動したり回頭したりすることを抑制することができる。
【0007】
(2)上記船舶制御システムにおいて、前記コントローラは、前記推力変更処理において、前記少なくとも2つの船舶推進機をシフトオフ状態からシフトオン状態に変更する構成としてもよい。本構成によれば、操船モードの指示の直後に船舶推進機がシフトオン状態に変更されることに起因して船体が意図しない方向に移動したり回頭したりすることを抑制することができる。
【0008】
(3)上記船舶制御システムにおいて、前記操作装置は、ジョイスティックを有しており、前記操船モードは、前記ジョイスティックの操作に基づき前記船舶を制御するジョイスティックモードである構成としてもよい。本構成によれば、ジョイスティックモードの指示の直後に船体が意図しない方向に移動したり回頭したりすることを抑制することができる。
【0009】
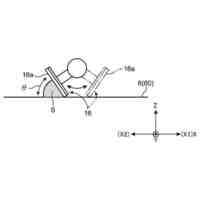
(4)上記船舶制御システムにおいて、前記目標角度関係は、前記少なくとも2つの船舶推進機の推力が互いに打ち消し合う舵角の関係である構成としてもよい。本構成によれば、船体が意図しない方向に移動したり回頭したりすることを効果的に抑制することができる。
【0010】
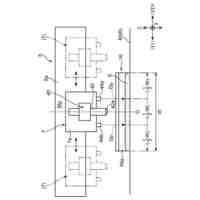
(5)上記船舶制御システムにおいて、前記複数の船舶推進機が、第1の船舶推進機と、第2の船舶推進機と、前記第1の船舶推進機と前記第2の船舶推進機との間に配された第3の船舶推進機と、を含み、前記コントローラは、前記舵角変更処理において、前記第1の船舶推進機および前記第2の船舶推進機のうち少なくとも一方の舵角を変更する構成としてもよい。本構成によれば、両端に配された2つの船舶推進機を舵角変更処理に利用することによって、シンプルな構成で操船モードの指示の直後に船体が意図しない方向に移動したり回頭したりすることを抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ヤマハ発動機株式会社
鞍乗型車両
17日前
ヤマハ発動機株式会社
基板作業装置
10日前
ヤマハ発動機株式会社
部品実装装置
18日前
ヤマハ発動機株式会社
部品実装システム
20日前
ヤマハ発動機株式会社
船外機および船舶
7日前
ヤマハ発動機株式会社
スクリーン印刷装置
6日前
ヤマハ発動機株式会社
スクリーン印刷装置
24日前
ヤマハ発動機株式会社
水ジェット推進艇および船舶
6日前
ヤマハ発動機株式会社
水ジェット推進艇および船舶
10日前
ヤマハ発動機株式会社
船舶制御システム、および船舶
1か月前
ヤマハ発動機株式会社
船舶制御システム、および船舶
1か月前
ヤマハ発動機株式会社
ガントリ装置及び部品実装装置
12日前
ヤマハ発動機株式会社
船舶制御システム、および船舶
19日前
ヤマハ発動機株式会社
変速機およびそれを備えた鞍乗型車両
4日前
ヤマハ発動機株式会社
操船システム、操船システムの制御方法及び船舶
5日前
ヤマハ発動機株式会社
充電率測定装置、充電率測定プログラム、電池パック、及び鞍乗型車両
19日前
ヤマハ発動機株式会社
操船者警告支援システムおよび操船者警告支援方法
12日前
個人
水上遊具
3か月前
個人
川下り用船
9か月前
個人
洋上研究所
1か月前
個人
発電船
10か月前
個人
シーアンカー
11か月前
個人
補助機構
5か月前
個人
船用横揺防止具
6か月前
個人
津波防災ウエア
17日前
個人
コンパクトシティ船
5か月前
個人
渦流動力推進構造
5か月前
個人
セールのバテンガイド装置
1か月前
個人
水質浄化・集熱昇温システム
2か月前
炎重工株式会社
浮標
7か月前
炎重工株式会社
浮標
7か月前
炎重工株式会社
移動体
10か月前
住友重機械工業株式会社
船舶
2か月前
株式会社ラフティ
サーフボード
2か月前
個人
船舶
7か月前
株式会社フルトン
水中捕捉装置
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ