TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025106980
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2024000634
出願日
2024-01-05
発明の名称
ロボットアーム操作システム、及び、その制御方法
出願人
一般社団法人 医科学総合研究所
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20250710BHJP(医学または獣医学;衛生学)
要約
【課題】遠隔地から医療器具を用いて医療行為を行う場合に適切なアシストを得られることが可能なロボットアーム操作システム、及び、その制御方法を提供する。
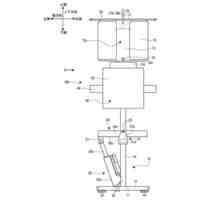
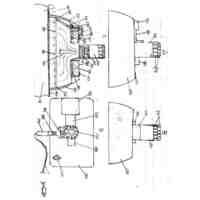
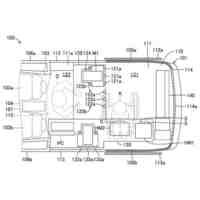
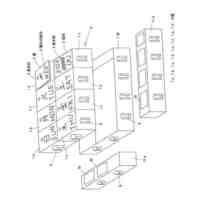
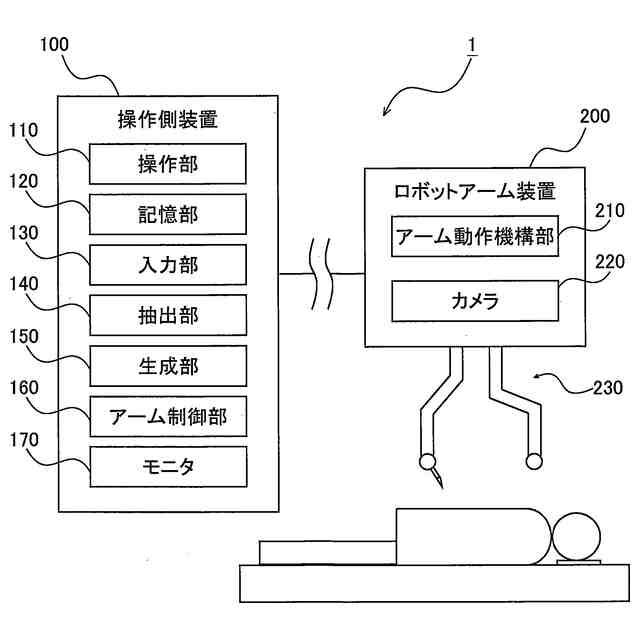
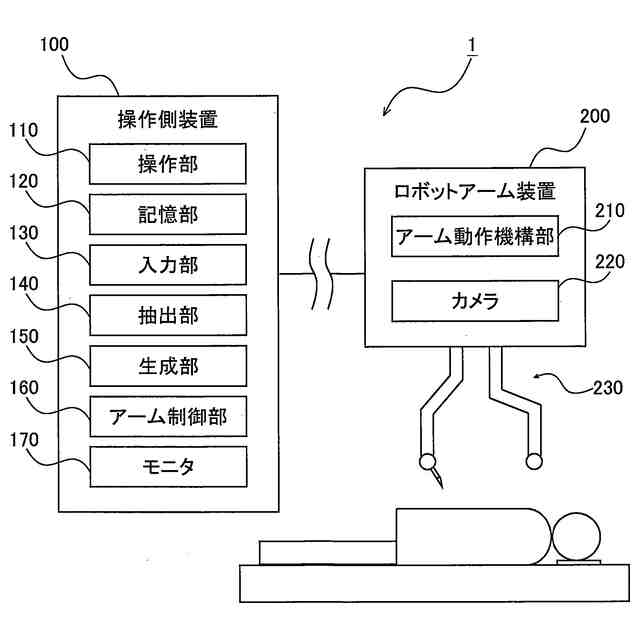
【解決手段】ロボットアーム操作システム1は、医療器具を用いる患者の身体部位の状態を示す状態情報と、その状態に応じたロボットアーム230の動作に関する動作情報とを対応させた手本データを多数記憶した記憶部120と、記憶部120の多数の手本データのうち状態情報に基づいて、現在の患者の身体部位の状態に応じた手本データを抽出する抽出部140と、操作者が操作する操作部110と、操作部110への操作に基づいてロボットアーム230を動作させるアーム制御部160とを備え、アーム制御部160は、操作部110に対して行われた操作に応じたロボットアーム230の挙動を、抽出部140により抽出された手本データの動作情報が示すロボットアーム230の動作に近づける。
【選択図】図2
特許請求の範囲
【請求項1】
遠隔地における操作者の操作に応じて、医療器具を有したロボットアームを動作させることで、遠隔地から医療器具を用いた医療行為を行うロボットアーム操作システムであって、
医療器具を用いる患者の身体部位の状態を示す状態情報と、その状態に応じた前記ロボットアームの動作に関する動作情報とを対応させた手本データを多数記憶した記憶手段と、
前記記憶手段により記憶される多数の前記手本データのうち前記状態情報に基づいて、現在の患者の身体部位の状態に応じた前記手本データを抽出する抽出手段と、
前記操作者が操作する操作手段と、
前記操作手段に対して行われた操作に基づいて前記ロボットアームを動作させる制御手段と、を備え、
前記制御手段は、前記操作手段に対して行われた操作に応じた前記ロボットアームの挙動を、前記抽出手段により抽出された前記手本データの動作情報が示す前記ロボットアームの動作に近づける
ことを特徴とするロボットアーム操作システム。
続きを表示(約 1,200 文字)
【請求項2】
前記制御手段は、予め定められた行為時における前記操作手段に対して行われた操作に応じた前記ロボットアームの挙動を、前記抽出手段により抽出された前記手本データの動作情報が示す前記ロボットアームの動作に近づける
ことを特徴とする請求項1に記載のロボットアーム操作システム。
【請求項3】
前記抽出手段により抽出された前記手本データの動作情報に基づいて、模倣すべき動作を示す模倣情報を含む模倣データを生成する生成手段をさらに備え、
前記制御手段は、前記操作手段に対して行われた操作に応じた前記ロボットアームの挙動を、前記生成手段により生成された前記模倣データの前記模倣情報が示す前記ロボットアームの動作に近づける
ことを特徴とする請求項1に記載のロボットアーム操作システム。
【請求項4】
前記制御手段は、前記操作手段に対して行われた操作に応じた前記ロボットアームの挙動が、前記生成手段により生成された前記模倣データの前記模倣情報が示す前記ロボットアームの動作と所定量以上離れる成分を含む場合、当該成分に関し、前記ロボットアームの挙動を前記模倣データの前記模倣情報が示す前記ロボットアームの動作に近づける
ことを特徴とする請求項3に記載のロボットアーム操作システム。
【請求項5】
前記制御手段は、前記操作手段に対して行われた操作に応じた前記ロボットアームの挙動を当該模倣データの模倣情報が示す前記ロボットアームの動作に近づけるにあたり、前記所定量以上離れる成分について、当該模倣情報が示す値から所定範囲内に設定される許容値となるように制限する
ことを特徴とする請求項4に記載のロボットアーム操作システム。
【請求項6】
遠隔地における操作者の操作に応じて、医療器具を有したロボットアームを動作させることで、遠隔地から医療器具を用いた医療行為を行うと共に、医療器具を用いる患者の身体部位の状態を示す状態情報と、その状態に応じた前記ロボットアームの動作に関する動作情報とを対応させた手本データを多数記憶した記憶手段を備えたロボットアーム操作システムの制御方法であって、
前記記憶手段により記憶される多数の前記手本データのうち前記状態情報に基づいて、現在の患者の身体部位の状態に応じた前記手本データを抽出する抽出工程と、
前記操作者が操作する操作工程と、
前記操作工程において行われた操作に応じて前記ロボットアームを動作させる制御工程と、を備え、
前記制御工程では、前記操作工程において行われた操作に応じた前記ロボットアームの挙動を、前記抽出工程において抽出された前記手本データの動作情報が示す前記ロボットアームの動作に近づける
ことを特徴とするロボットアーム操作システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットアーム操作システム、及び、その制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、操作者が操作することにより手術器具が装着されたロボットアームを動作させて手術を行うロボットアーム操作システムが提案されている(例えば特許文献1参照)。このようなロボットアーム操作システムにより、例えば操作者は手術対象となる患者から遠く離れた遠隔地にいたとしても、患者に対して手術を行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2023-81078号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、特許文献1に記載のシステムは、操作者の手術技術が最も重要となり、しかも遠隔手術は患者の手術部位を映像により把握しながら行うことから、実際の手術よりも難易度が高く、適切な手術を行うことが困難化してしまう。
【0005】
加えて、特許文献1に記載のシステムは、操作者の意図通りロボットアームを動かすものであり、折角ロボットという装置を用いているにも関わらず、装置を利用してさらに適切に手術を行うようなアシストを得られないという問題もある。
【0006】
なお、このような問題は、遠隔地から手術を行う場合に限られず、例えば遠隔地から注射を行う場合や、歯科医が遠隔地から歯を削る場合等、遠隔地から医療器具を用いて行う他の医療行為にも共通する問題である。
【0007】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、遠隔地から医療器具を用いて医療行為を行う場合に適切なアシストを得られることが可能なロボットアーム操作システム、及び、その制御方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明に係るロボットアーム操作システムは、遠隔地における操作者の操作に応じて、医療器具を有したロボットアームを動作させることで、遠隔地から医療器具を用いた医療行為を行うロボットアーム操作システムであって、医療器具を用いる患者の身体部位の状態を示す状態情報と、その状態に応じた前記ロボットアームの動作に関する動作情報とを対応させた手本データを多数記憶した記憶手段と、前記記憶手段により記憶される多数の前記手本データのうち前記状態情報に基づいて、現在の患者の身体部位の状態に応じた前記手本データを抽出する抽出手段と、前記操作者が操作する操作手段と、前記操作手段に対して行われた操作に基づいて前記ロボットアームを動作させる制御手段と、を備え、前記制御手段は、前記操作手段に対して行われた操作に応じた前記ロボットアームの挙動を、前記抽出手段により抽出された前記手本データの動作情報が示す前記ロボットアームの動作に近づける。
【0009】
本発明に係るロボットアーム操作システムの制御方法は、遠隔地における操作者の操作に応じて、医療器具を有したロボットアームを動作させることで、遠隔地から医療器具を用いた医療行為を行うと共に、医療器具を用いる患者の身体部位の状態を示す状態情報と、その状態に応じた前記ロボットアームの動作に関する動作情報とを対応させた手本データを多数記憶した記憶手段を備えたロボットアーム操作システムの制御方法であって、前記記憶手段により記憶される多数の前記手本データのうち前記状態情報に基づいて、現在の患者の身体部位の状態に応じた前記手本データを抽出する抽出工程と、前記操作者が操作する操作工程と、前記操作工程において行われた操作に応じて前記ロボットアームを動作させる制御工程と、を備え、前記制御工程では、前記操作工程において行われた操作に応じた前記ロボットアームの挙動を、前記抽出工程において抽出された前記手本データの動作情報が示す前記ロボットアームの動作に近づける。
【発明の効果】
【0010】
本発明によれば、適切なアシストを得られることが可能なロボットアーム操作システムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
5か月前
個人
鼾防止用具
5か月前
個人
短下肢装具
23日前
個人
歯茎みが品
6か月前
個人
脈波測定方法
6か月前
個人
脈波測定方法
5か月前
個人
前腕誘導装置
27日前
個人
マッサージ機
6か月前
個人
導電香
6か月前
個人
嚥下鍛錬装置
1か月前
個人
洗井間専家。
4か月前
個人
白内障治療法
5か月前
個人
収納容器
8か月前
個人
片足歩行支援具
7か月前
個人
バッグ式オムツ
1か月前
個人
矯正椅子
2か月前
個人
歯の修復用材料
1か月前
個人
ホバーアイロン
4か月前
個人
クリップ
6か月前
個人
陣痛緩和具
1か月前
個人
シャンプー
3か月前
個人
車椅子持ち上げ器
5か月前
三生医薬株式会社
錠剤
5か月前
個人
歯の保護用シール
2か月前
個人
眼科診療車
7か月前
個人
口内洗浄具
6か月前
個人
哺乳瓶冷まし容器
21日前
個人
避難困難者救出台車
7か月前
株式会社八光
剥離吸引管
2か月前
個人
性行為補助具
13日前
個人
服薬支援装置
4か月前
株式会社コーセー
化粧料
7か月前
株式会社コーセー
美爪料
7か月前
株式会社 MTG
浴用剤
6か月前
個人
除菌システム
7か月前
株式会社結心
手袋
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ