TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102921
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2025061306,2023526846
出願日
2025-04-02,2021-12-02
発明の名称
遠隔支援システム
出願人
ファナック株式会社
代理人
弁理士法人にじいろ特許事務所
主分類
G05B
19/18 20060101AFI20250701BHJP(制御;調整)
要約
【課題】目的は、安全性の高い遠隔支援システムを提供することにある。
【解決手段】 遠隔支援システム1は、産業機械10を制御する制御装置40と、制御装置40に接続され、制御装置40を制御する権限であって、制御範囲が規定された制御権を有する第1の情報処理端末50と、第1の情報処理端末50にデータ通信可能に接続され、第1の情報処理端末50を操作する権限である操作権を有する第2の情報処理端末60と、を具備し、操作権は、第1の情報処理端末50を操作するユーザによって第2の情報処理端末60に付与され、操作権により、制御装置40を制御できる範囲は、制御権に規定された制御範囲に実質的に制限される。
【選択図】図1
特許請求の範囲
【請求項1】
産業機械を制御する制御装置と、
前記制御装置に接続され、前記制御装置を制御する権限であって、制御範囲が規定された制御権を有する第1の情報処理端末と、
前記第1の情報処理端末に対してデータ通信可能に接続され、前記第1の情報処理端末を操作する権限である操作権を有する第2の情報処理端末と、
を具備し、
前記操作権は、前記第1の情報処理端末を操作するユーザにより、前記第2の情報処理端末に付与され、
前記操作権により前記制御装置を制御できる範囲は、前記制御権に規定された前記制御範囲に実質的に制限される、
遠隔支援システム。
続きを表示(約 980 文字)
【請求項2】
前記制御権は、前記第1の情報処理端末に対するユーザ操作に従って、前記第1の情報処理端末に設定される、請求項1記載の遠隔支援システム。
【請求項3】
前記操作権は、前記第1の情報処理端末に対して前記制御権が設定された後において、前記第1の情報処理端末に対するユーザ操作に従って、前記第2の情報処理端末に付与される、請求項2記載の遠隔支援システム。
【請求項4】
前記制御権は、前記制御範囲が異なる第1制御権と第2制御権とを有し、
前記第1の情報処理端末は、前記第1制御権又は前記第2制御権を有する、請求項1記載の遠隔支援システム。
【請求項5】
前記第1制御権は、前記産業機械の動力源の駆動を含む第1制御範囲を有し、
前記第2制御権は、前記産業機械の動力源の駆動を含まない第2制御範囲を有する、請求項4記載の遠隔支援システム。
【請求項6】
前記制御権は、前記制御装置に保持されている前記産業機械に関する複数種類の情報を取得、確認、修正、及び変更する権限である、請求項1記載の遠隔支援システム。
【請求項7】
前記産業機械に関する複数種類の情報は、前記産業機械に発生したアラーム情報、前記産業機械に関する設定情報、前記産業機械と外部装置との間の入出力情報、前記産業機械のタスクプログラムに関する情報のうち少なくとも一を含む、請求項6記載の遠隔支援システム。
【請求項8】
産業機械を制御する制御装置と、
前記制御装置に接続され、前記制御装置の制御権を有する第1の情報処理端末と、
前記第1の情報処理端末を制御可能な第2の情報処理端末と、を具備し、
前記制御権は、前記産業機械の動力源による駆動を含む第1制御権と前記動力源による駆動を含まない第2制御権とを有し、
前記第1の情報処理端末には、前記第1の情報処理端末に対する操作に従って、前記第1制御権又は前記第2制御権が設定され、
前記第2の情報処理端末を操作するユーザにより、前記第1の情報処理端末を介して、前記制御装置を制御できる範囲は、前記第1制御権が及ぶ範囲又は前記第2制御権が及ぶ範囲に実質的に制限される、
遠隔支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔支援システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、製造工場へのロボットや工作機械などの高機能な産業機械の導入が進んでいる。例えば、ロボットには、専用の操作装置が備えられており、ユーザは操作装置を操作することで、直感的にロボットに動作を教示することができる。一方で、ロボットには、PC、タブレット等の汎用的な情報処理端末を接続できるようになっており、ユーザは、ロボットにPCを接続することにより、専用の操作装置を使用することなく、ロボットの設定データの確認や変更などを行うことができる。
【0003】
しかしながら、ロボットが停止したまま動かなくなってしまうなどの不測の事態に対して、現場にいる作業員だけでは対応できない場合がある。このような場合、ロボットメーカの担当者にメール、電話等で問い合わせ、担当者から指示された通りに現場の作業員がロボットを操作する。それでも解決できないとき、ロボットメーカの技術者が直接訪問し、ロボットを操作することとなる。ロボットメーカの技術者がすぐに訪問できない場合には、ロボットの停止期間が長くなってしまい、製造スケジュールの遅延が生じてしまう。これを解決するために、特許文献1には、ロボットのトラブル発生時におけるサービス員による支援を実現するための遠隔操作システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2001-142512号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、遠隔操作システムでは、システムに浸入した第三者や遠隔操作者であるサービス員による、現場にいる作業員の意図しない操作が問題となる場合がある。例えば、現場の状況を把握できていない操作者によりロボットが動かされてしまい、現場にいる作業員や障害物にロボットが衝突してしまう可能性がある。また、遠隔操作により操作されている情報処理端末のデータに不正にアクセスされてしまう可能性がある。このように、遠隔操作を行うサービス員やネットワークへの侵入者に対する安全性や、遠隔操作時の現場の安全性の観点では改善の余地があり、より安全性の高い遠隔支援システムが望まれている。
【課題を解決するための手段】
【0006】
本開示の一態様に係る遠隔支援システムは、産業機械を制御する制御装置と、制御装置に接続され、制御装置を制御する権限であって、制御範囲が規定された制御権を有する第1の情報処理端末と、第1の情報処理端末に対してデータ通信可能に接続され、第1の情報処理端末を操作する権限である操作権を有する第2の情報処理端末と、を具備する。操作権は、第1の情報処理端末を操作するユーザにより、第2の情報処理端末に付与され、操作権により制御装置を制御できる範囲は、制御権に規定された制御範囲に実質的に制限される。
【発明の効果】
【0007】
本開示の一態様によれば、安全性の高い遠隔支援を実現することができる。
【図面の簡単な説明】
【0008】
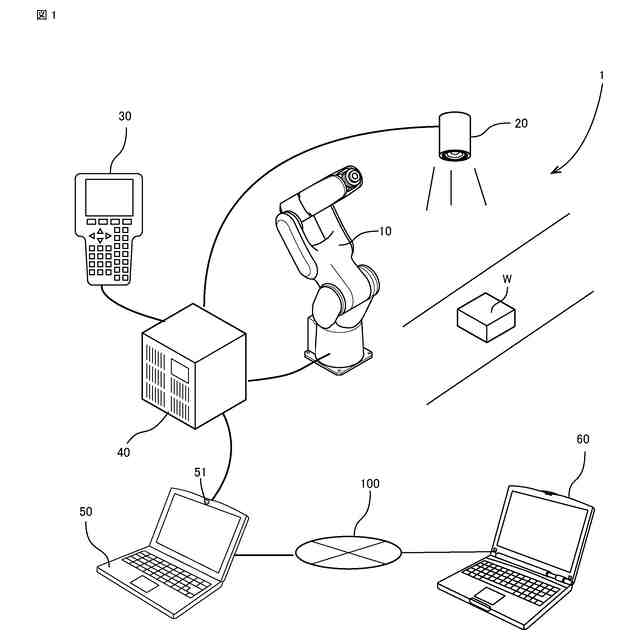
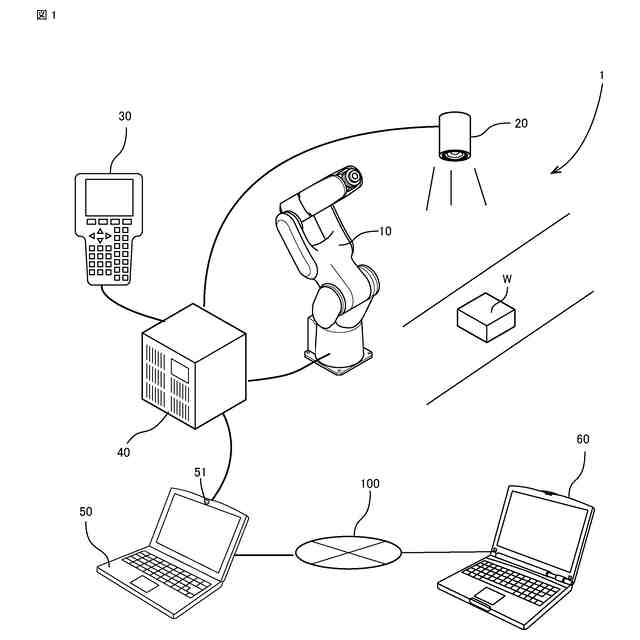
図1は、本実施形態に係る遠隔支援システムの一例を示す図である。
図2は、図1の遠隔支援システムのブロック構成図である。
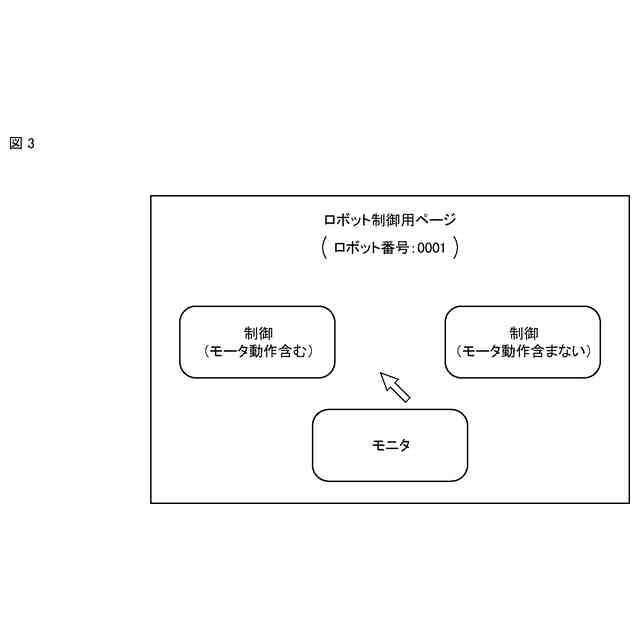
図3は、図1のユーザ端末に表示される制御装置の制御モードの選択画面である。
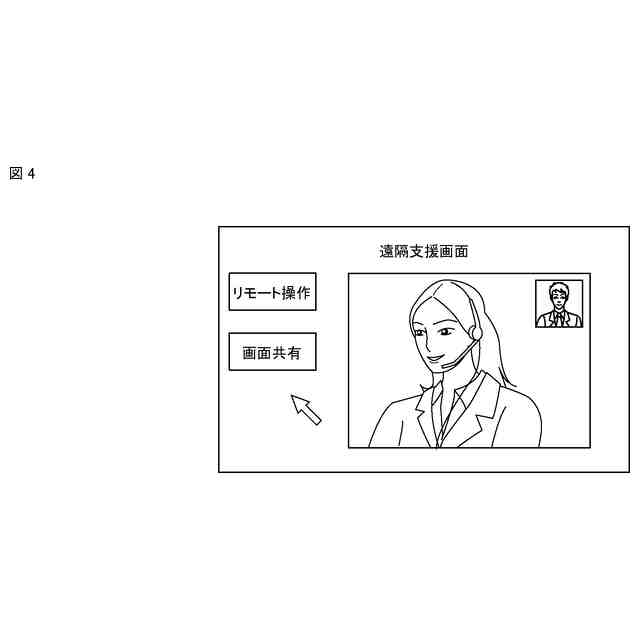
図4は、図1のユーザ端末に表示される技術者端末の接続モードの選択画面である。
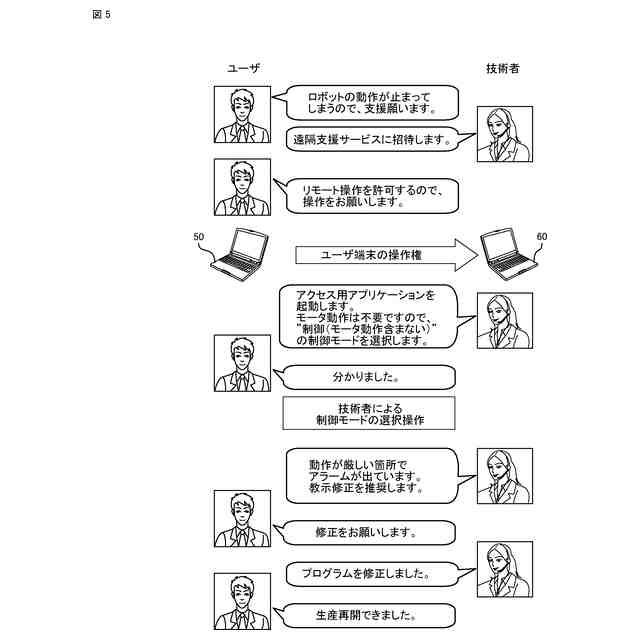
図5は、図1の遠隔支援システムを利用した遠隔支援サービスの一例を示す図である。
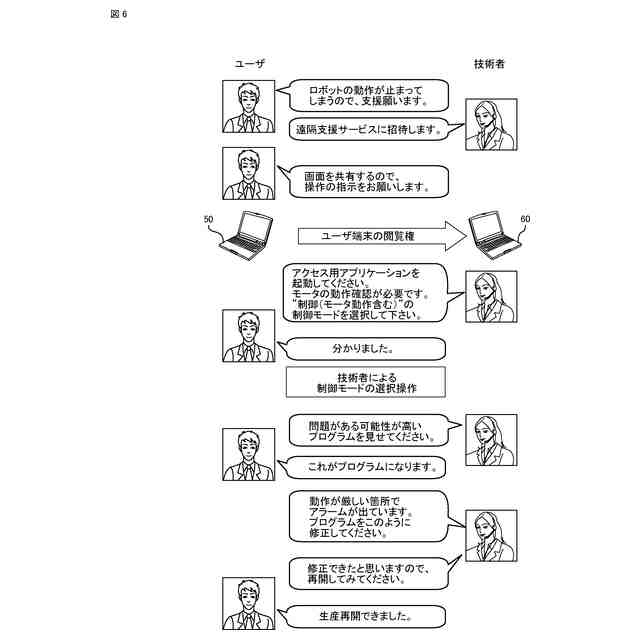
図6は、図1の遠隔支援システムを利用した遠隔支援サービスの他の例を示す図である。
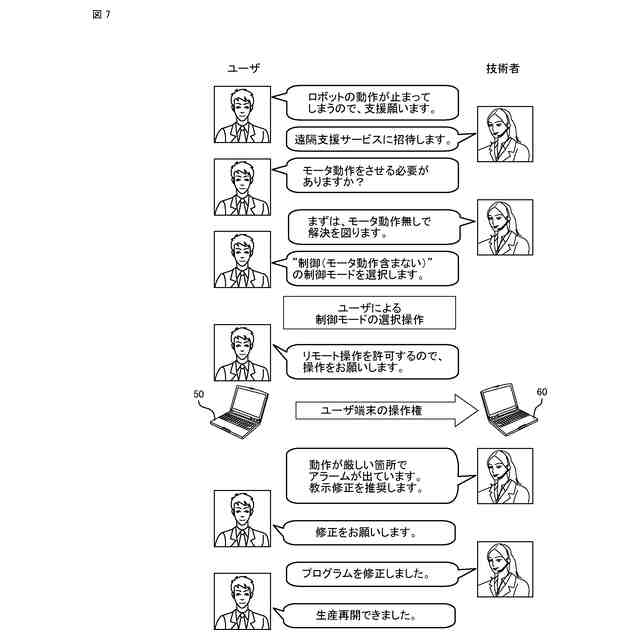
図7は、図1の遠隔支援システムを利用した遠隔支援サービスの他の例を示す図である。
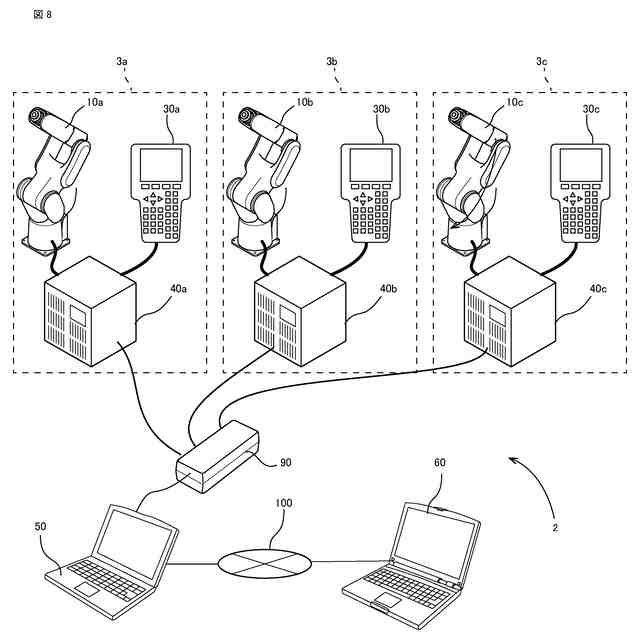
図8は、本実施形態に係る遠隔支援システムの他の例を示す図である。
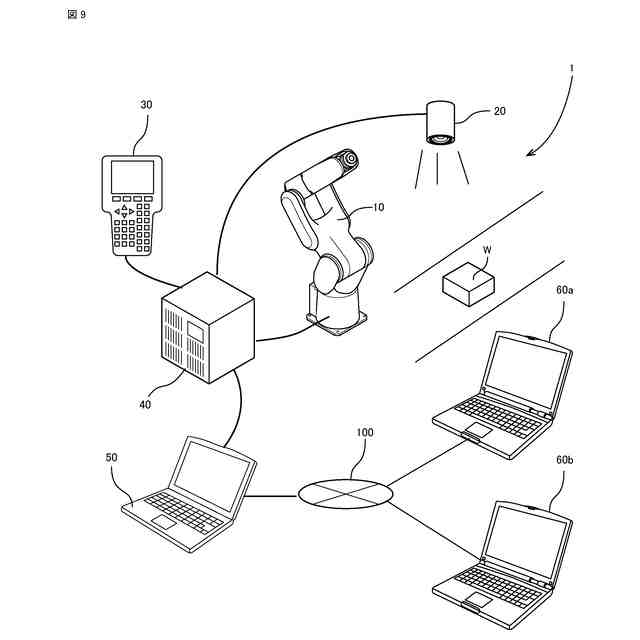
図9は、本実施形態に係る遠隔支援システムの第1変形例を示す図である。
図10は、本実施形態に係る遠隔支援システムの第2変形例を示す図である。
図11は、本実施形態に係る遠隔支援システムの第3変形例を示す図である。
図12は、本実施形態に係る遠隔支援システムの第4変形例を示す図である。
図13は、本実施形態に係る遠隔支援システムの第5変形例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら本発明の実施形態に係る遠隔支援システムを説明する。以下の説明において、略同一の機能及び構成を有する構成要素については、同一符号を付し、重複説明は必要な場合にのみ行う。
【0010】
図1に示すように、本実施形態に係る遠隔支援システム1は、工場に設置されたロボットアーム機構10と、ワークWを撮影するカメラ20と、ロボットアーム機構10及びカメラ20を制御する制御装置40と、ロボットアーム機構10を操作するための専用の操作ペンダント30と、工場の作業員(ユーザ)が操作するPC、タブレット等の第1の情報処理端末50(ユーザ端末50)と、遠隔地にいるロボットメーカの技術者やロボットメーカから委託されたメンテナンス会社の技術者が操作するPC、タブレット等の第2の情報処理端末60(技術者端末60)と、を有する。典型的には、操作ペンダント30とユーザ端末50とは、制御装置40に対して有線ケーブルで接続されている。技術者端末60は、ユーザ端末50に対してインターネット等の外部ネットワーク100を介してデータ通信可能に接続されている。操作ペンダント30とユーザ端末50とは、制御装置40を含むローカルエリアネットワークを介して有線又は無線によりデータ通信可能に接続されていてもよい。ロボットアーム機構10とカメラ20と制御装置40とはロボットシステムを構成する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
20日前
株式会社ダイヘン
移動体
25日前
ローム株式会社
半導体集積回路
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
20日前
株式会社オプトン
制御プログラム生成装置
18日前
株式会社鷺宮製作所
制御装置
19日前
キヤノン電子株式会社
加工装置、及び、制御方法
5日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社ダイヘン
負荷時タップ切換器
25日前
株式会社やまびこ
走行制御装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイフク
物品搬送設備
18日前
株式会社ダイフク
物品搬送設備
18日前
株式会社ダイフク
物品搬送設備
11日前
株式会社タブチ
減圧弁
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
シンフォニアテクノロジー株式会社
異常検知装置
18日前
株式会社計数技研
移動体、及びプログラム
1か月前
オムロン株式会社
安全装置
18日前
三菱電機株式会社
電源回路
5日前
個人
ペダル装置、及びペダル装置を具備する自動車
今日
株式会社ダイフク
飛行体制御システム
7日前
日本信号株式会社
自走式装置
2か月前
ローム株式会社
半導体装置
1か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
井関農機株式会社
作業車両
3か月前
株式会社日立製作所
製造工程管理システム
19日前
株式会社デンソー
診断装置
2か月前
株式会社大林組
作業機械の自動運転制御システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ