TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102446
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219898
出願日
2023-12-26
発明の名称
作業機械、散水装置、及び散水システム
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20250701BHJP(水工;基礎;土砂の移送)
要約
【課題】散水作業を効率良く実施すること。
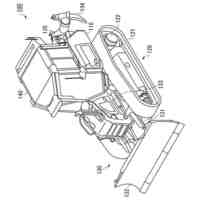
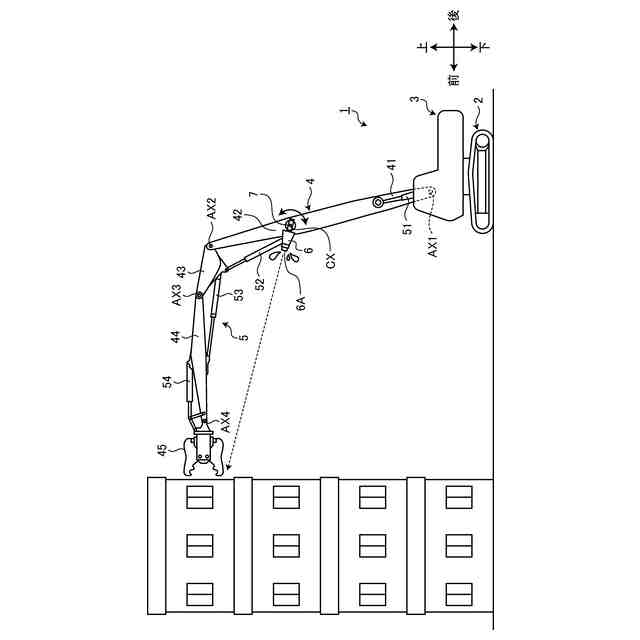
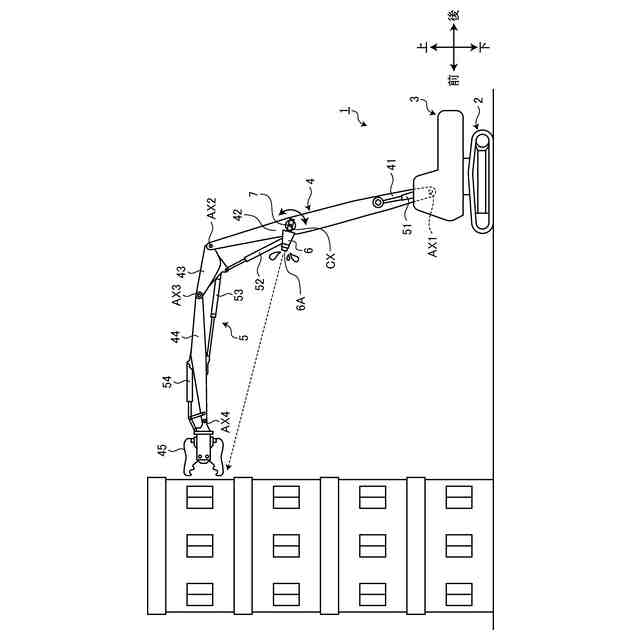
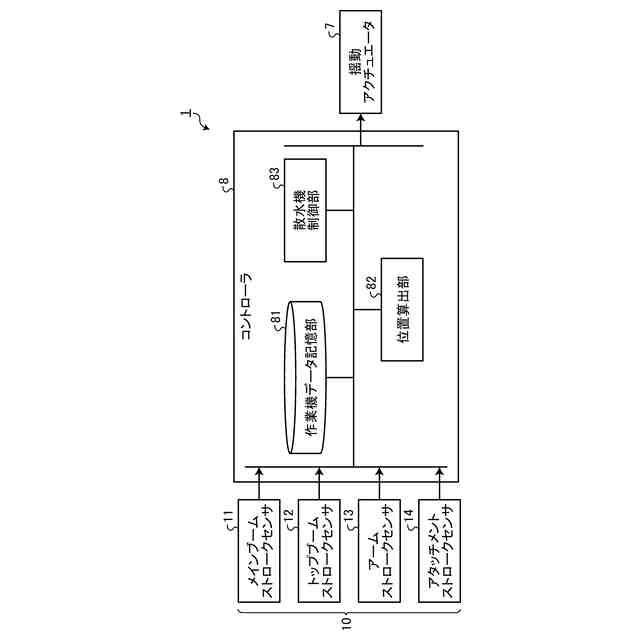
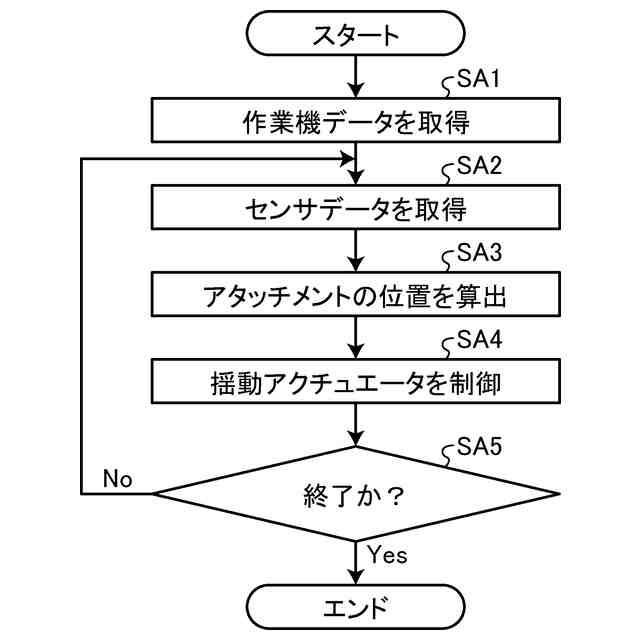
【解決手段】作業機械は、解体対象を解体するアタッチメントを含む作業機と、散水機と、散水機の向きを変更する揺動アクチュエータと、作業機の角度と作業機の寸法とに基づいて、アタッチメントの位置を算出する位置算出部と、アタッチメントの位置に基づいて、揺動アクチュエータを制御する散水機制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
解体対象を解体するアタッチメントを含む作業機と、
散水機と、
前記散水機の向きを変更する揺動アクチュエータと、
前記作業機の角度と前記作業機の寸法とに基づいて、前記アタッチメントの位置を算出する位置算出部と、
前記アタッチメントの位置に基づいて、前記揺動アクチュエータを制御する散水機制御部と、を備える、
作業機械。
続きを表示(約 1,600 文字)
【請求項2】
前記作業機の角度を検出する角度センサと、
前記作業機の寸法を記憶する作業機データ記憶部と、を備え、
前記位置算出部は、前記角度センサの検出データと、前記作業機データ記憶部に記憶されている前記作業機の寸法とに基づいて、前記アタッチメントの位置を算出する、
請求項1に記載の作業機械。
【請求項3】
前記散水機制御部は、前記散水機による散水位置が前記アタッチメントに追従するように、前記揺動アクチュエータを制御する、
請求項1に記載の作業機械。
【請求項4】
前記散水機制御部は、前記アタッチメントの先端部又は前記アタッチメントの先端部が接触する前記解体対象の一部に散水されるように、前記揺動アクチュエータを制御する、
請求項1に記載の作業機械。
【請求項5】
前記散水機は、前記作業機に取り付けられる、
請求項1に記載の作業機械。
【請求項6】
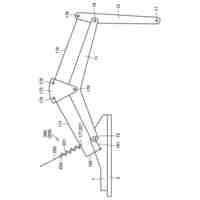
前記作業機は、作業機回動軸を中心に相対的に回動可能な複数の作業機要素を含み、
前記散水機は、前記作業機回動軸に平行な散水回動軸を中心に回動可能に前記作業機要素に取り付けられる、
請求項5に記載の作業機械。
【請求項7】
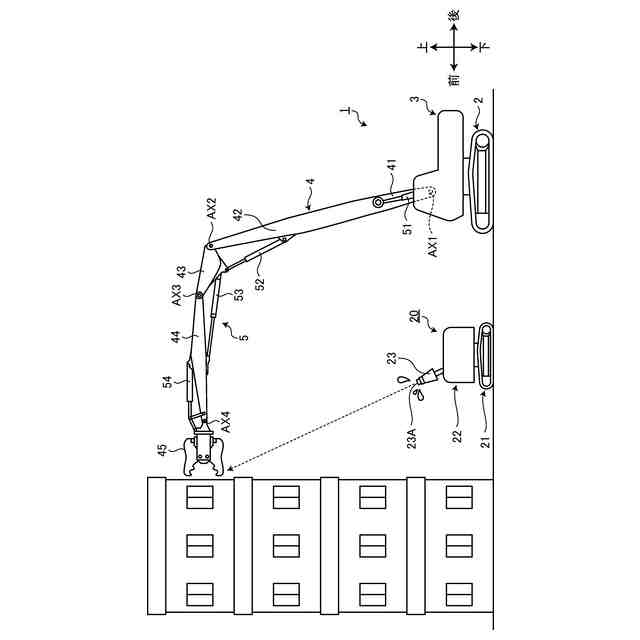
前記作業機が連結される旋回体を備え、
前記作業機要素は、前記旋回体に回動可能に連結されるメインブームと、前記メインブームに接続されるトップブームと、前記トップブームに回動可能に連結される中間リンクと、前記中間リンクに回動可能に連結されるアームと、を含み、
前記アタッチメントは、前記アームに回動可能に連結され、
前記散水機は、前記トップブームに回動可能に取り付けられる、
請求項6に記載の作業機械。
【請求項8】
前記中間リンクの角度を検出する第1角度センサと、
前記アームの角度を検出する第2角度センサと、
前記アタッチメントの角度を検出する第3角度センサと、
前記中間リンクの寸法、前記アームの寸法、及び前記アタッチメントの寸法を記憶する作業機データ記憶部と、を備え、
前記位置算出部は、前記第1角度センサの検出データ、前記第2角度センサの検出データ、及び前記第3角度センサの検出データと、前記作業機データ記憶部に記憶されている前記中間リンクの寸法、前記アームの寸法、及び前記アタッチメントの寸法とに基づいて、前記散水機に対する前記アタッチメントの先端部の相対位置を算出する、
請求項7に記載の作業機械。
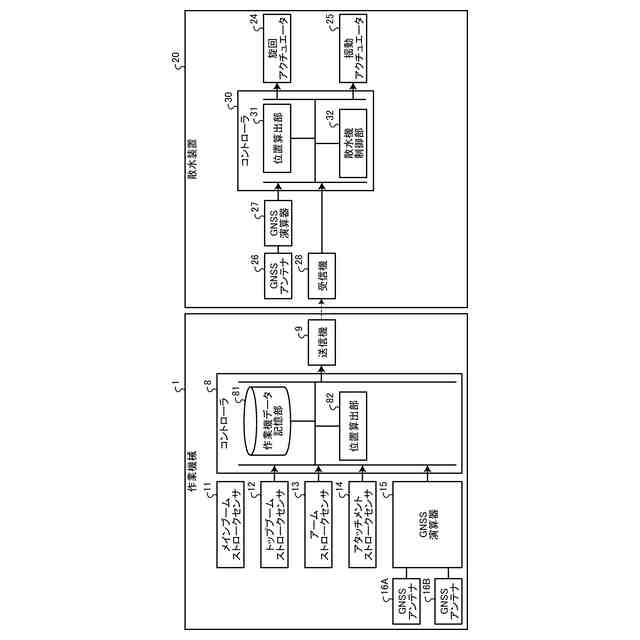
【請求項9】
走行体と、
前記走行体に支持される旋回体と、
前記旋回体に支持される散水機と、
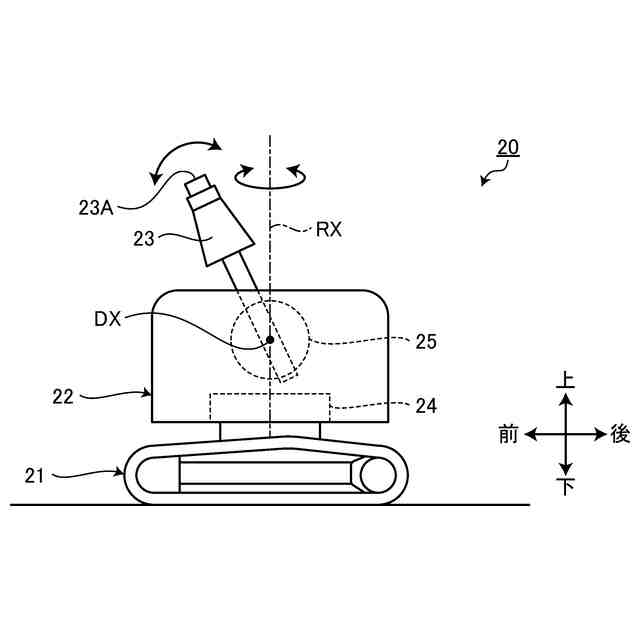
前記旋回体を旋回させる旋回アクチュエータと、
前記散水機の向きを変更する揺動アクチュエータと、
解体対象を解体するアタッチメントを含む作業機の角度と前記作業機の寸法とに基づいて算出された前記アタッチメントの位置を受信する位置算出部と、
前記アタッチメントの位置に基づいて、前記揺動アクチュエータ及び前記旋回アクチュエータの少なくとも一方を制御する散水機制御部と、を備える、
散水装置。
【請求項10】
前記位置算出部は、前記アタッチメントの絶対位置を受信し、
前記旋回体の絶対位置を検出する位置センサを備え、
前記位置算出部は、前記アタッチメントの絶対位置と前記旋回体の絶対位置とに基づいて、前記旋回体に対する前記アタッチメントの相対位置を算出し、
前記散水機制御部は、前記アタッチメントの相対位置に基づいて、前記旋回アクチュエータ及び前記揺動アクチュエータの少なくとも一方を制御する、
請求項9に記載の散水装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械、散水装置、及び散水システムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような解体仕様車が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2019-143358号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
解体作業においては、解体対象からの粉塵の飛散を抑制するために散水作業が実施される。散水作業を効率良く実施できる技術が要望される。
【0005】
本開示は、散水作業を効率良く実施することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、解体対象を解体するアタッチメントを含む作業機と、散水機と、散水機の向きを変更する揺動アクチュエータと、作業機の角度と作業機の寸法とに基づいて、アタッチメントの位置を算出する位置算出部と、アタッチメントの位置に基づいて、揺動アクチュエータを制御する散水機制御部と、を備える、作業機械が提供される。
【発明の効果】
【0007】
本開示によれば、散水作業を効率良く実施することができる。
【図面の簡単な説明】
【0008】
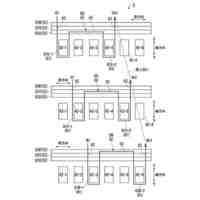
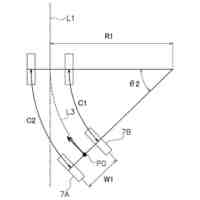
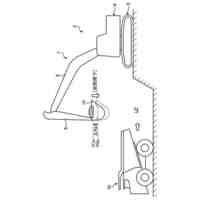
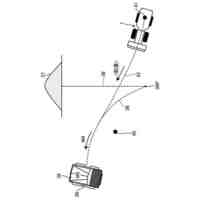
図1は、第1実施形態に係る作業機械を模式的に示す側面図である。
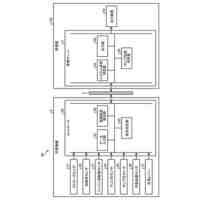
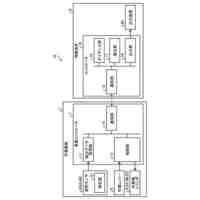
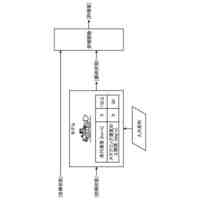
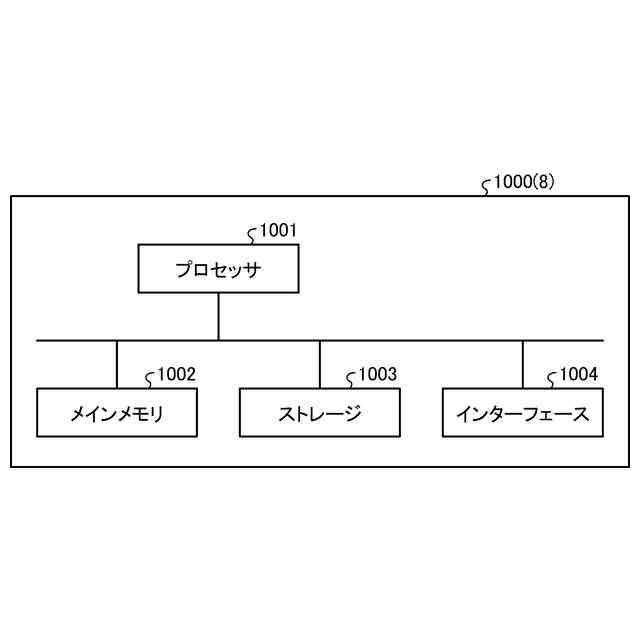
図2は、第1実施形態に係る作業機械のコントローラを示すハードウエア構成図である。
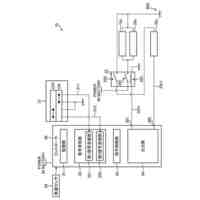
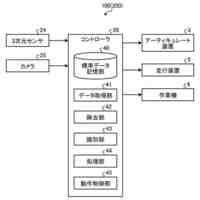
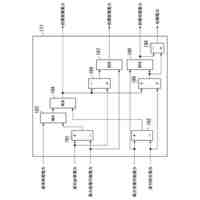
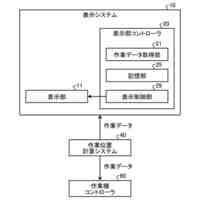
図3は、第1実施形態に係る作業機械を示すブロック図である。
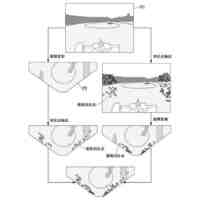
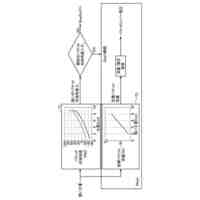
図4は、第1実施形態に係る散水方法を示すフローチャートである。
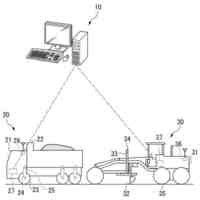
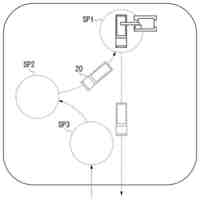
図5は、第2実施形態に係る作業機械及び散水装置を模式的に示す側面図である。
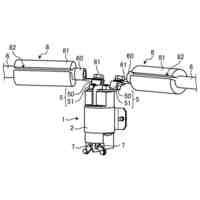
図6は、第2実施形態に係る散水装置を模式的に示す側面図である。
図7は、第2実施形態に係る作業機械及び散水装置を示すブロック図である。
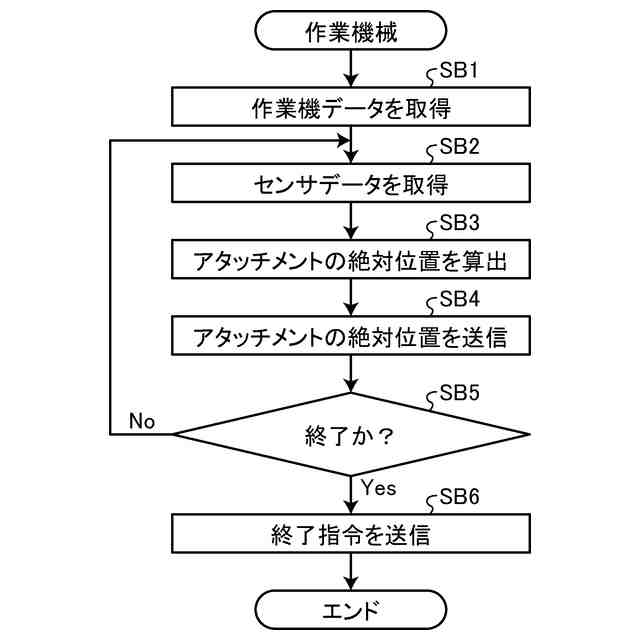
図8は、第2実施形態に係る散水方法を示すフローチャートである。
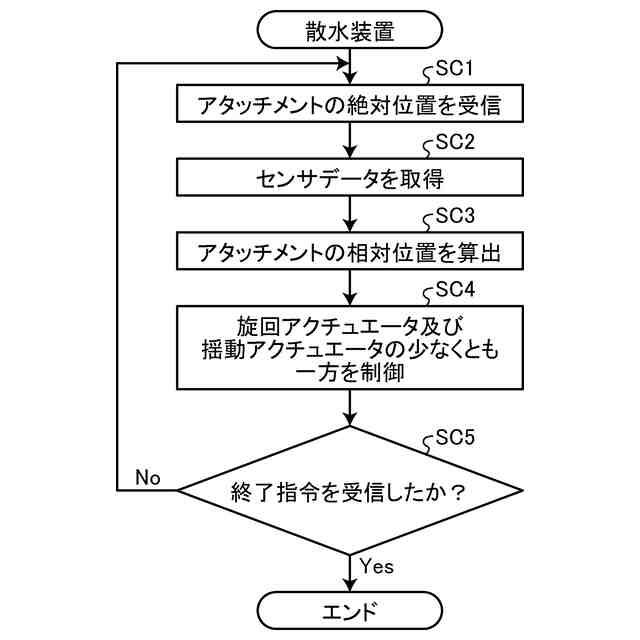
図9は、第2実施形態に係る散水方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
今日
株式会社小松製作所
モータ
今日
株式会社小松製作所
作業機械
8日前
株式会社小松製作所
作業機械
1か月前
株式会社小松製作所
電装部品
1か月前
株式会社小松製作所
作業機械
1日前
株式会社小松製作所
路面整備システム
今日
株式会社小松製作所
回転電機及び作業機械
28日前
株式会社小松製作所
作業機械の履帯式走行装置
1か月前
株式会社小松製作所
識別システム及び識別方法
28日前
株式会社小松製作所
モータ及びモータの製造方法
今日
株式会社小松製作所
システム、作業車両および方法
1日前
株式会社小松製作所
システム、作業車両および方法
1日前
株式会社小松製作所
ロータ、回転電機及び作業機械
1か月前
株式会社小松製作所
ステータ、回転電機及び作業機械
2か月前
株式会社小松製作所
ステータ、回転電機及び作業機械
28日前
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
作業機械、及び、トランスファ装置
13日前
株式会社小松製作所
表示システム、表示方法及び作業機械
14日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
28日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
7日前
株式会社小松製作所
産業機械の熱変位補正装置及び熱変位補正方法
29日前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
今日
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
今日
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
14日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
15日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
22日前
株式会社小松製作所
作業機械の計測システム及び作業機械の計測方法
1か月前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
今日
株式会社小松製作所
作業機械の制御システム及び作業機械の制御方法
1か月前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
今日
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
今日
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
8日前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
28日前
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
今日
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ