TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025114291
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024008899
出願日
2024-01-24
発明の名称
作業機械の制御システム及び作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20250729BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の走行作業にエラーが生じた場合、作業機械を走行作業に円滑に復帰させること。
【解決手段】作業機械の制御システムは、コントローラを備える。コントローラは、目標走行経路に従って走行作業する作業機械のリスタート位置を設定するリスタート位置設定部と、走行作業にエラーが生じたときに、作業機械をリスタート位置に移動させた後、走行作業に復帰させる動作制御部と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
コントローラを備え、
前記コントローラは、
目標走行経路に従って走行作業する作業機械のリスタート位置を設定するリスタート位置設定部と、
前記走行作業にエラーが生じたときに、前記作業機械を前記リスタート位置に移動させた後、前記走行作業に復帰させる動作制御部と、を備える、
作業機械の制御システム。
続きを表示(約 990 文字)
【請求項2】
前記リスタート位置は、前記エラーが生じたエラー位置とは異なる位置である、
請求項1に記載の作業機械の制御システム。
【請求項3】
前記リスタート位置は、前記目標走行経路から離れた位置である、
請求項2に記載の作業機械の制御システム。
【請求項4】
前記動作制御部は、前記作業機械を前記リスタート位置まで移動させた後、前記リスタート位置から前記目標走行経路まで移動させて前記走行作業に復帰させる、
請求項3に記載の作業機械の制御システム。
【請求項5】
前記動作制御部は、前記作業機械を前記リスタート位置において停車させた後、前記走行作業に復帰させる、
請求項1に記載の作業機械の制御システム。
【請求項6】
前記動作制御部は、前記作業機械を前記リスタート位置まで後進させた後、前記リスタート位置から前進させて前記走行作業に復帰させる、
請求項1に記載の作業機械の制御システム。
【請求項7】
前記作業機械は、走行装置と、作業機とを有し、
前記走行作業は、掘削作業及び積込作業の少なくとも一方を含む、
請求項1に記載の作業機械の制御システム。
【請求項8】
前記コントローラは、
前記目標走行経路を生成する作業データ生成部を更に備え、
前記作業データ生成部は、前記作業機械が予め設定された複数の走行作業を実施するように前記目標走行経路を生成し、
前記走行作業に復帰させることは、前記走行作業に復帰させることを含む、
請求項7に記載の作業機械の制御システム。
【請求項9】
前記エラーは、前記目標走行経路からの前記作業機械の逸脱を含む、
請求項1に記載の作業機械の制御システム。
【請求項10】
前記エラーは、前記目標走行経路からの前記作業機械の逸脱量が予め定められている規定量以上であることを含み、
前記動作制御部は、前記逸脱量が前記規定量を下回る場合、前記リスタート位置に移動させずに、前記逸脱量が小さくなるように前記作業機械を制御する、
請求項1に記載の作業機械の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御システム及び作業機械の制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような自動掘削機が知られている。
【先行技術文献】
【特許文献】
【0003】
特開平10-088625号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械が走行経路に従って走行作業しているときに、走行作業にエラーが生じる可能性がある。
【0005】
本開示は、作業機械の走行作業にエラーが生じた場合、作業機械を走行作業に円滑に復帰させることを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、コントローラを備える作業機械の制御システムが提供される。コントローラは、目標走行経路に従って走行作業する作業機械のリスタート位置を設定するリスタート位置設定部と、走行作業にエラーが生じたときに、作業機械をリスタート位置に移動させた後、走行作業に復帰させる動作制御部と、を備える。
【発明の効果】
【0007】
本開示によれば、作業機械の走行作業にエラーが生じた場合、作業機械を走行作業に円滑に復帰させることができる。
【図面の簡単な説明】
【0008】
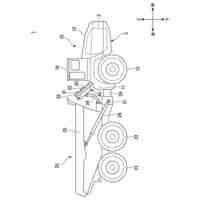
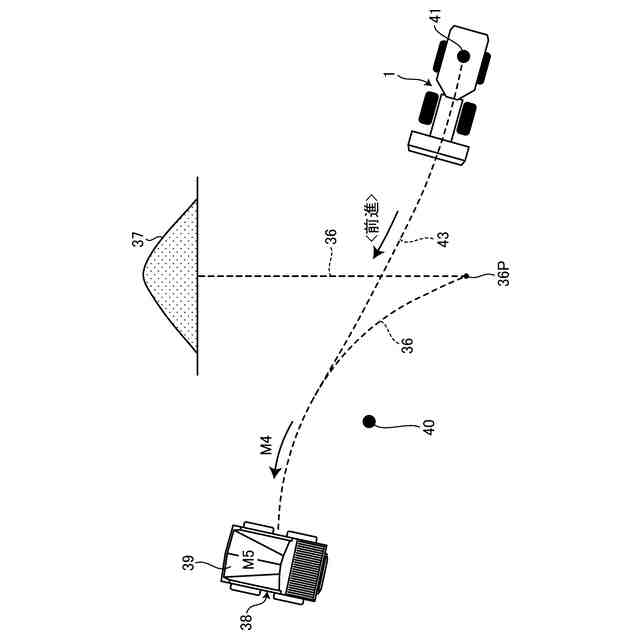
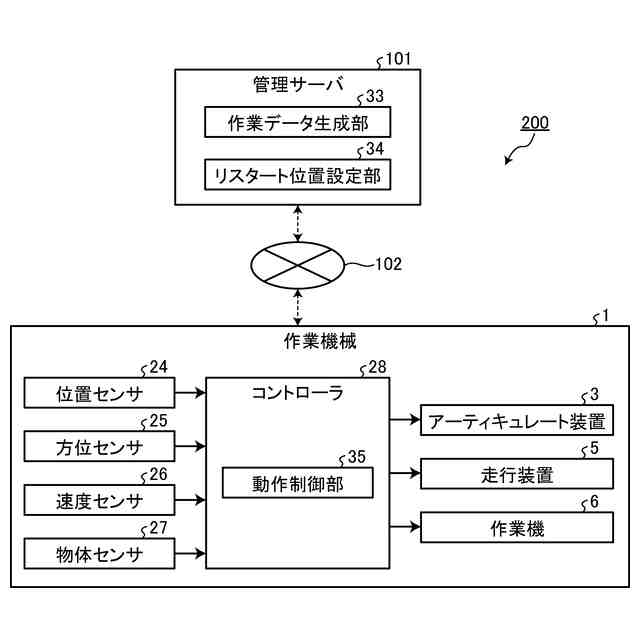
図1は、第1実施形態に係る作業現場の管理システムを模式的に示す図である。
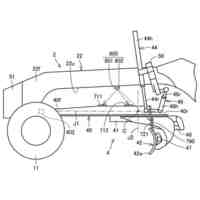
図2は、第1実施形態に係る作業機械を示す構成図である。
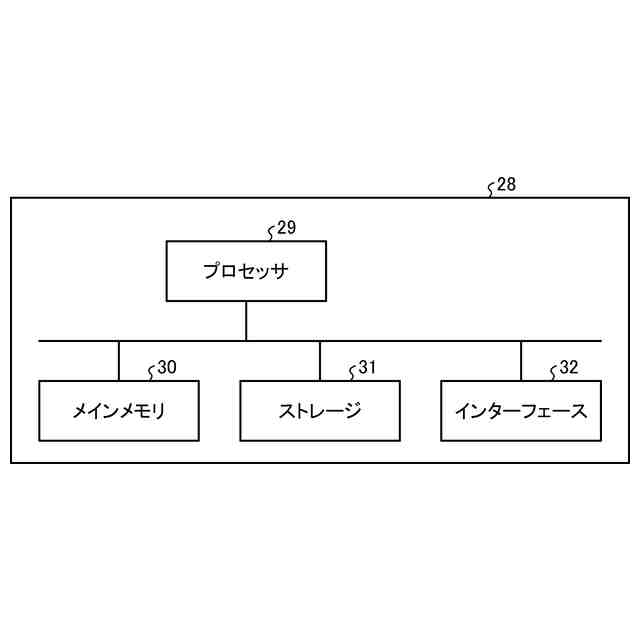
図3は、第1実施形態に係るコントローラのハードウエア構成図である。
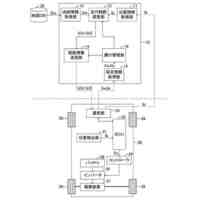
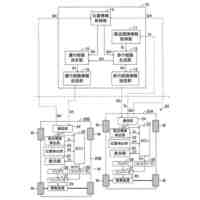
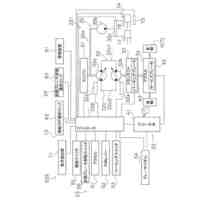
図4は、第1実施形態に係る作業機械の制御システムを示す機能ブロック図である。
図5は、第1実施形態に係る作業機械のサイクル作業を説明する図である。
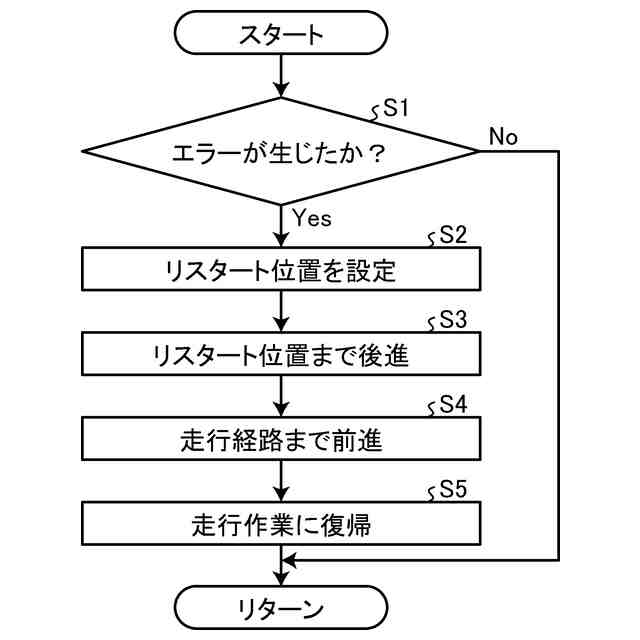
図6は、第1実施形態に係る作業機械の制御方法を示すフローチャートである。
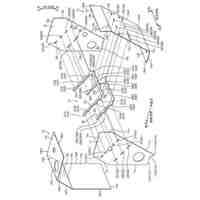
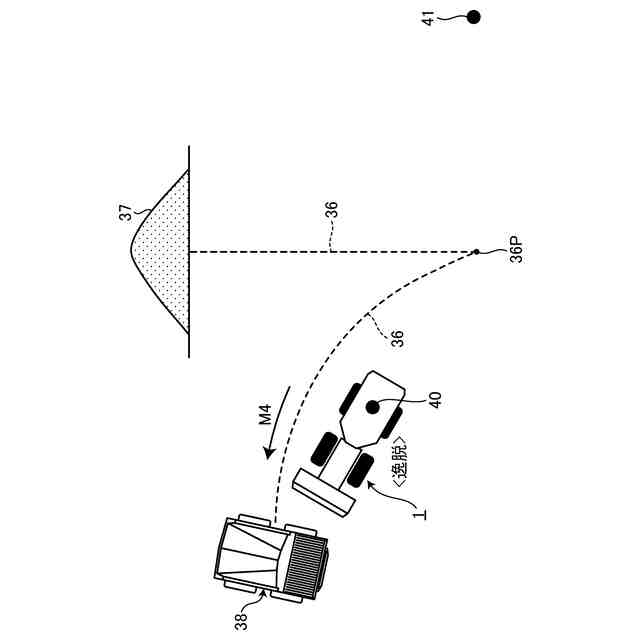
図7は、第1実施形態に係る作業機械の制御方法を説明する図である。
図8は、第1実施形態に係る作業機械の制御方法を説明する図である。
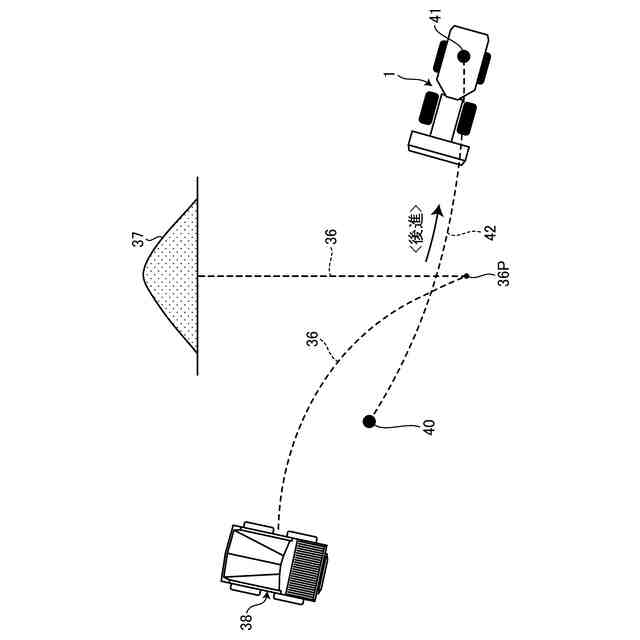
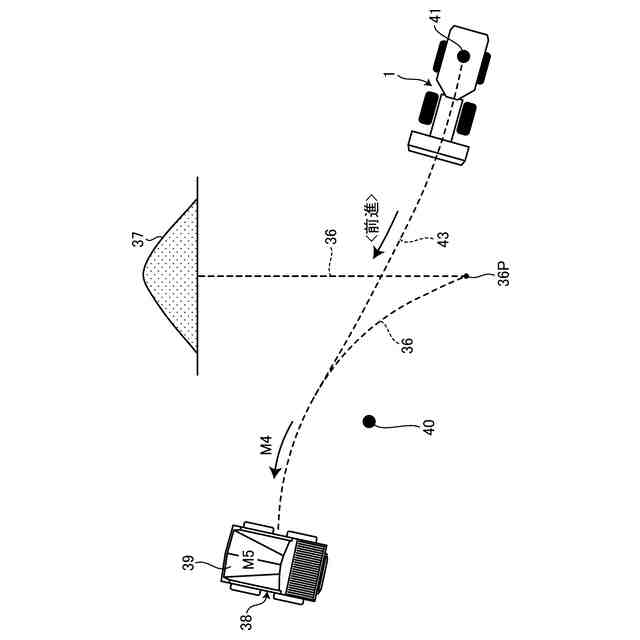
図9は、第1実施形態に係る作業機械の制御方法を説明する図である。
図10は、第2実施形態に係る作業機械の制御方法を説明する図である。
図11は、第3実施形態に係る作業機械の制御方法を説明する図である。
図12は、第3実施形態に係る作業機械の制御方法を説明する図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業車両
3日前
株式会社小松製作所
作業車両
3日前
株式会社小松製作所
作業車両用作動油タンク及び作業車両
今日
トヨタ自動車株式会社
運行管理装置
6日前
トヨタ自動車株式会社
運行管理装置
6日前
トヨタ自動車株式会社
車両走行管理装置
6日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
6日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
3日前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
1日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
15日前
株式会社小松製作所
故障した作業機械の故障原因を診断するためのシステム及び方法
3日前
株式会社小松製作所
作業機械および作業機械の制御方法
13日前
個人
鋼管
14日前
FKS株式会社
擁壁
3日前
株式会社クボタ
作業車
1日前
株式会社クボタ
作業車
1日前
株式会社奥村組
ケーソン工法
6日前
個人
擁壁用ブロックおよび擁壁
今日
株式会社奥村組
ケーソン刃口金物
6日前
株式会社武井工業所
積みブロック
23日前
株式会社大林組
建物の構造
今日
株式会社大林組
袋体付き排水パイプ
13日前
株式会社熊谷組
密度計測方法
1日前
株式会社大林組
袋体付き排水パイプ
13日前
日立建機株式会社
作業機械
3日前
大和ハウス工業株式会社
杭抜き先端具
7日前
ヤマト発動機株式会社
浮遊型消波装置
3日前
日立建機株式会社
作業機械
21日前
ゼニヤ海洋サービス株式会社
通船ゲート
13日前
鹿島建設株式会社
接続方法および接続構造
13日前
株式会社フジタ
掘削機
22日前
JFEスチール株式会社
鋼管矢板の継手構造
15日前
JFEスチール株式会社
鋼管矢板の継手構造
3日前
株式会社フジタ
建築物とその施工方法
13日前
有限会社 櫂設計事務所
掘削・撹拌具
29日前
JFEスチール株式会社
鋼管矢板の継手構造
15日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ