TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025097120
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213228
出願日
2023-12-18
発明の名称
モデル更新システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/00 20060101AFI20250623BHJP(車両一般)
要約
【課題】車両の制御に用いられていない方の機械学習モデルが自動的に再学習される。
【解決手段】車両(1)に、第1機械学習モデルAと第2機械学習モデルBとが搭載され、センサ(40)の出力信号が第1機械学習モデルAおよび第2機械学習モデルBの双方に入力される。第1機械学習モデルAからの出力情報を用いて車両制御装置(40)が制御される。第1機械学習モデルA、Bにおける認識内容に基づき、第1機械学習モデルAと第2機械学習モデルBのいずれの機械学習モデルが優位であるかが比較評価され、第1機械学習モデルAの方が優位であると評価されたときには、第2機械学習モデルBが再学習される。再学習された第2機械学習モデルBの更新情報が車両(1)に送信され、車両(1)に搭載されている第2機械学習モデルBが、受信した更新情報に従い更新される。
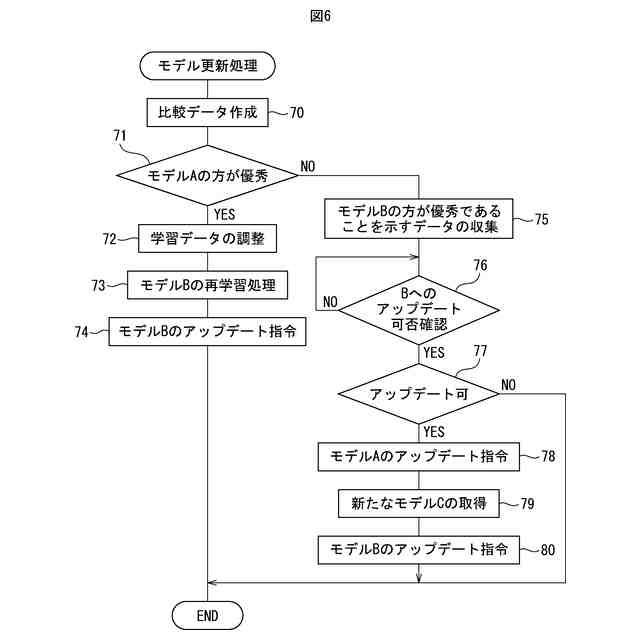
【選択図】図6
特許請求の範囲
【請求項1】
車両に搭載されたプロセッサを具備しており、該車両に、車両に搭載されたセンサの出力信号を入力すると車両制御装置の制御に用いる特定情報を出力する複数個の機械学習モデルが搭載されており、該機械学習モデルが、互いに異なる第1機械学習モデルと第2機械学習モデルとを含んでおり、
該プロセッサが、
車両に搭載されたセンサの出力信号を第1機械学習モデルおよび第2機械学習モデルの双方に入力させて第1機械学習モデルおよび第2機械学習モデルから該特定情報を出力させ、
第1機械学習モデルから出力された該特定情報および第2機械学習モデルから出力された該特定情報のうちで第1機械学習モデルから出力された該特定情報を用いて車両制御装置を制御し、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容を車両外部のデータサーバに送信するように構成されており、
該データサーバのプロセッサが、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容に基づき、第1機械学習モデルと第2機械学習モデルのいずれの機械学習モデルが優位であるかを比較評価し、
第1機械学習モデルが第2機械学習モデルよりも優位であると評価されたときには、第2機械学習モデルを再学習させ、
再学習された第2機械学習モデルの更新情報を車両に送信するように構成されており、
車両に搭載されたプロセッサが、
車両に搭載されている第2機械学習モデルを、受信した更新情報に従い更新するように構成されたモデル更新システム。
続きを表示(約 1,700 文字)
【請求項2】
該データサーバのプロセッサが、
データサーバのメモリ内に、第1機械学習モデルと更新された第2機械学習モデルのいずれの機械学習モデルが優位であるかに関する比較評価結果を記憶蓄積するように構成され、
更新された第2機械学習モデルが第1機械学習モデルよりも優位であると評価されたときには、記憶蓄積された比較評価結果から、更新された第2機械学習モデルが第1機械学習モデルよりも優位であることを示す比較評価を収集可能である請求項1に記載のモデル更新システム。
【請求項3】
該データサーバのプロセッサが、
収集された比較評価に基づき、第1機械学習モデルを更新された第2機械学習モデルに置き換え可能である場合には、第1機械学習モデルおよび更新された第2機械学習モデルの双方と異なる第3機械学習モデルを取得して、第1機械学習モデルと更新された第2機械学習モデルとを置き換えるアップデート指令および第3機械学習モデルを車両に送信するように構成されており、
車両に搭載されたプロセッサが、第1機械学習モデルと更新された第2機械学習モデルとを置き換えるアップデート指令を受信したときには、第1機械学習モデルと更新された第2機械学習モデルとを置き換えて、更新された第2機械学習モデルを新たな第1機械学習モデルとし、更に、第1機械学習モデルを第3機械学習モデルに置き換えて第3機械学習モデルを新たな第2機械学習モデルとするように構成されている請求項2に記載のモデル更新システム。
【請求項4】
車両に搭載されたプロセッサと車両に搭載されたメモリを具備しており、
該メモリが、車両に搭載されたセンサの出力信号を入力すると車両制御装置の制御に用いる特定情報を出力する複数個の機械学習モデルを記憶しており、該機械学習モデルが、互いに異なる第1機械学習モデルと第2機械学習モデルとを含んでおり、
該プロセッサが、
車両に搭載されたセンサの出力信号を第1機械学習モデルおよび第2機械学習モデルの双方に入力させて第1機械学習モデルおよび第2機械学習モデルから該特定情報を出力させ、
第1機械学習モデルから出力された該特定情報および第2機械学習モデルから出力された該特定情報のいずれか一方を用いて車両制御装置を制御し、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容を車両外部のデータサーバに送信するように構成されており、
該データサーバのプロセッサが、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容に基づき、第1機械学習モデルと第2機械学習モデルのいずれの機械学習モデルが優位であるかを比較評価し、
第1機械学習モデルが第2機械学習モデルよりも優位であると評価されたときには、第1機械学習モデルから出力された該特定情報を車両制御装置の制御に用い、
第1機械学習モデルが第2機械学習モデルよりも優位であると評価されたときには、第2機械学習モデルを再学習させ、
再学習された第2機械学習モデルの更新情報を車両に送信するように構成されており、
車両に搭載されたプロセッサが、
車両に搭載されたメモリに記憶されている第2機械学習モデルを、受信した更新情報に従い更新するように構成されており、
該データサーバのプロセッサが、
第2機械学習モデルが第1機械学習モデルよりも優位であると評価されたときには、第2機械学習モデルから出力された制御信号を車両制御装置の制御に用い、
第2機械学習モデルが第1機械学習モデルよりも優位であると評価されたときには、第1機械学習モデルを再学習させ、
再学習された第1機械学習モデルの更新情報を車両に送信するように構成され、
車両に搭載されたプロセッサが、
車両に搭載されたメモリに記憶されている第1機械学習モデルを、受信した更新情報に従い更新するように構成されたモデル更新システム。
発明の詳細な説明
【技術分野】
【0001】
本発明はモデル更新システムに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
車両走行中に、車両前方の移動体や障害物を認識するために、機械学習技術を用いた画像認識モジュールがよく用いられる。この画像認識モジュールは車両の種々の走行シーンにおいて取得された画像データに基づき画像識別機能の学習を行うことが必要となる。そこで、シミュレーション技術を用いて画像認識モジュールの画像識別機能を学習するようにしたシミュレーションシステムが公知である(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-60511号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一方、機械学習を用いたときには、安全性を説明できることが必要であり、このとき、実際に市場を走行したときの実データが安全性を証明するための証拠として、最も強力である。本発明は、実際に市場を走行したときの実データを得ることのできるシステムを提供することを一つの目的としている。
【課題を解決するための手段】
【0005】
本発明によれば、車両に搭載されたプロセッサを具備しており、車両に、車両に搭載されたセンサの出力信号を入力すると車両制御装置の制御に用いる特定情報を出力する複数個の機械学習モデルが搭載されており、機械学習モデルが、互いに異なる第1機械学習モデルと第2機械学習モデルとを含んでおり、
プロセッサが、
車両に搭載されたセンサの出力信号を第1機械学習モデルおよび第2機械学習モデルの双方に入力させて第1機械学習モデルおよび第2機械学習モデルから上述の特定情報を出力させ、
第1機械学習モデルから出力された上述の特定情報および第2機械学習モデルから出力された上述の特定情報のうちで第1機械学習モデルから出力された上述の特定情報を用いて車両制御装置を制御し、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容を車両外部のデータサーバに送信するように構成されており、
データサーバのプロセッサが、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容に基づき、第1機械学習モデルと第2機械学習モデルのいずれの機械学習モデルが優位であるかを比較評価し、
第1機械学習モデルが第2機械学習モデルよりも優位であると評価されたときには、第2機械学習モデルを再学習させ、
再学習された第2機械学習モデルの更新情報を車両に送信するように構成されており、
車両に搭載されたプロセッサが、
車両に搭載されている第2機械学習モデルを、受信した更新情報に従い更新するように構成されたモデル更新システムが提供される。
【0006】
また、本発明によれば、車両に搭載されたプロセッサと車両に搭載されたメモリを具備しており、
メモリが、車両に搭載されたセンサの出力信号を入力すると車両制御装置の制御に用いる特定情報を出力する複数個の機械学習モデルを記憶しており、機械学習モデルが、互いに異なる第1機械学習モデルと第2機械学習モデルとを含んでおり、
プロセッサが、
車両に搭載されたセンサの出力信号を第1機械学習モデルおよび第2機械学習モデルの双方に入力させて第1機械学習モデルおよび第2機械学習モデルから上述の特定情報を出力させ、
第1機械学習モデルから出力された上述の特定情報および第2機械学習モデルから出力された上述の特定情報のいずれか一方を用いて車両制御装置を制御し、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容を車両外部のデータサーバに送信するように構成されており、
データサーバのプロセッサが、
第1機械学習モデルにおける認識内容および第2機械学習モデルにおける認識内容に基づき、第1機械学習モデルと第2機械学習モデルのいずれの機械学習モデルが優位であるかを比較評価し、
第1機械学習モデルが第2機械学習モデルよりも優位であると評価されたときには、第1機械学習モデルから出力された上述の特定情報を車両制御装置の制御に用い、
第1機械学習モデルが第2機械学習モデルよりも優位であると評価されたときには、第2機械学習モデルを再学習させ、
再学習された第2機械学習モデルの更新情報を車両に送信するように構成されており、
車両に搭載されたプロセッサが、
車両に搭載されたメモリに記憶されている第2機械学習モデルを、受信した更新情報に従い更新するように構成されており、
データサーバのプロセッサが、
第2機械学習モデルが第1機械学習モデルよりも優位であると評価されたときには、第2機械学習モデルから出力された制御信号を車両制御装置の制御に用い、
第2機械学習モデルが第1機械学習モデルよりも優位であると評価されたときには、第1機械学習モデルを再学習させ、
再学習された第1機械学習モデルの更新情報を車両に送信するように構成され、
車両に搭載されたプロセッサが、
車両に搭載されたメモリに記憶されている第1機械学習モデルを、受信した更新情報に従い更新するように構成されたモデル更新システムが提供される。
【発明の効果】
【0007】
一番目の発明では、第2機械学習モデルが自動的に更新され、二番目の発明では、第1機械学習モデルおよび第2機械学習モデルが自動的に更新される。
【図面の簡単な説明】
【0008】
図1は、車両の構成を示す図である。
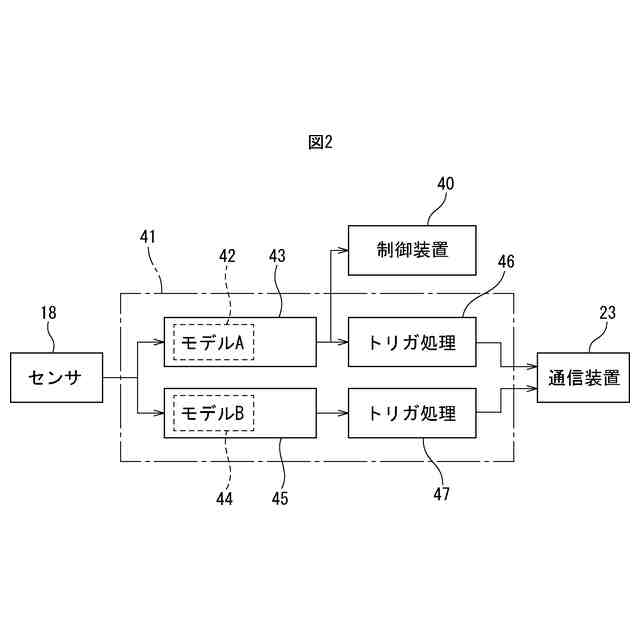
図2は、車両制御装置の制御システムの第1実施例の機能構成図である。
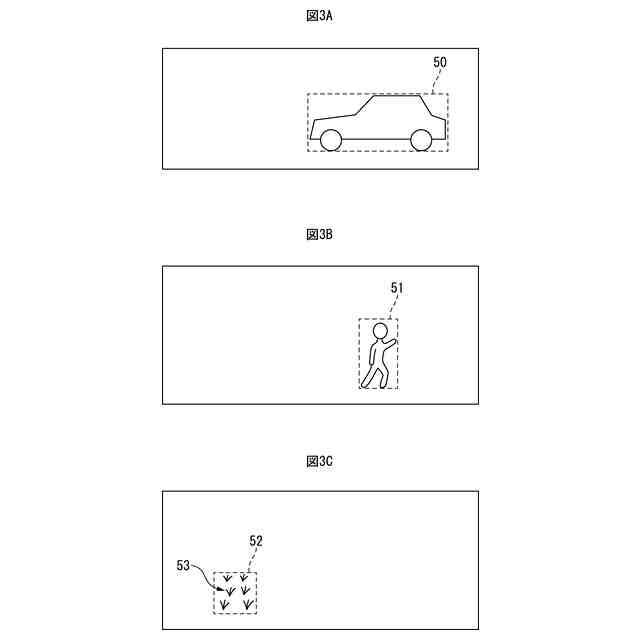
図3A、図3B、図3Cは、画像データを図解的に示す図である。
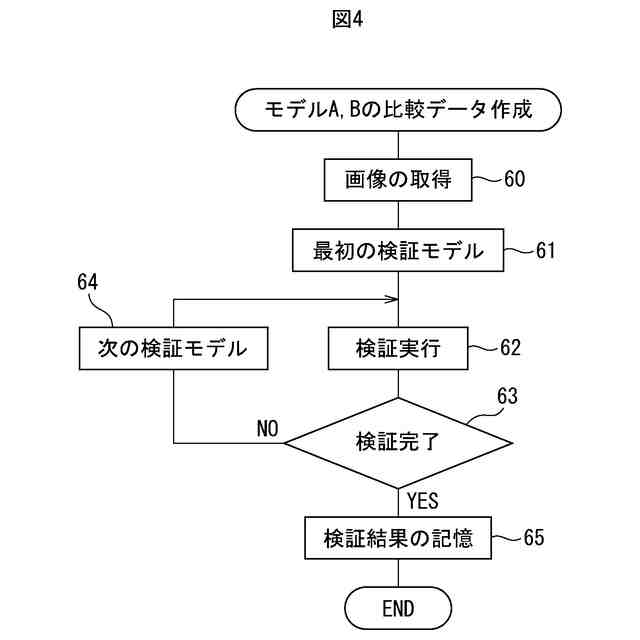
図4は、機械学習モデルA、Bの比較データを作成するためのフローチャートである
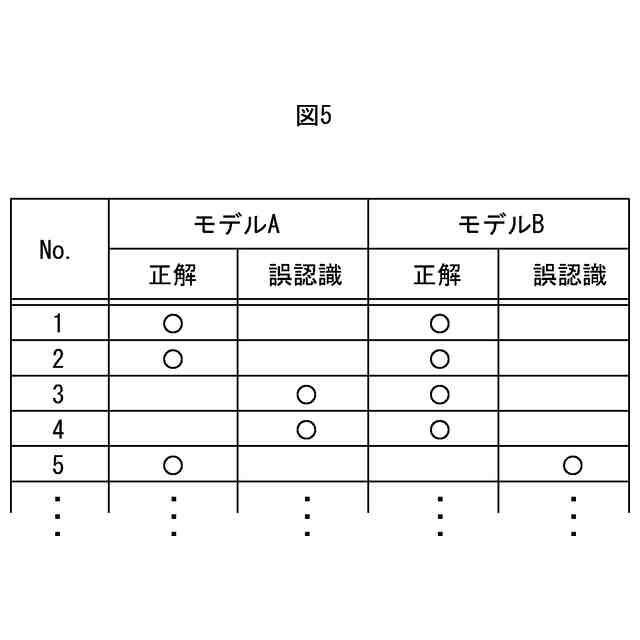
図5は、機械学習モデルA、Bの比較データ表を示す図である。
図6は、第1実施例においてモデル更新処理を行うためのフローチャートである。
図7は、車両制御装置の制御システムの第2実施例の機能構成図である。
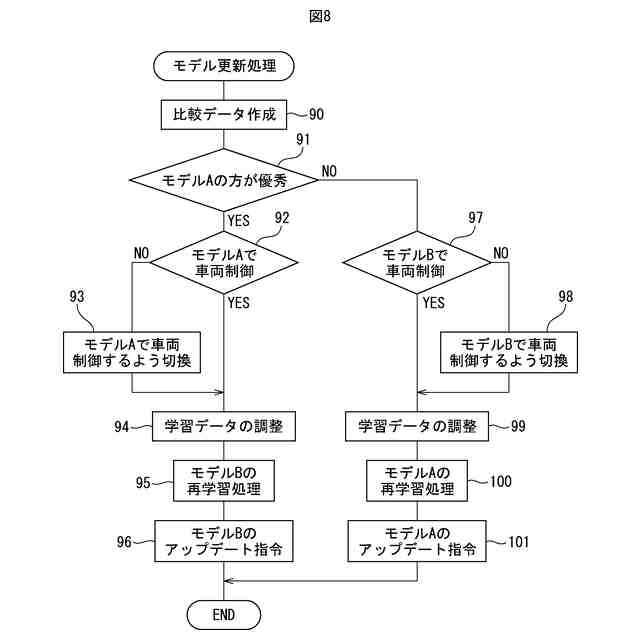
図8は、第2実施例においてモデル更新処理を行うためのフローチャートである。
【発明を実施するための形態】
【0009】
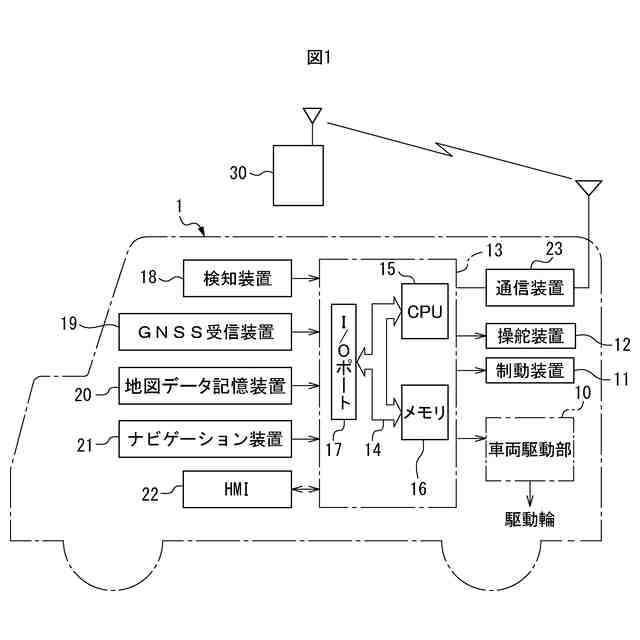
最初に、図1を参照しつつ、車両1の構成について説明する。図1を参照すると、10は車両1の駆動輪に駆動力を与えるための車両駆動部、11は車両1を制動するための制動装置、12は車両1を操舵するための操舵装置、13は車両1内に搭載された電子制御ユニットを夫々示す。図1に示されるように、電子制御ユニット13はデジタルコンピュータからなり、双方向性バス14によって互いに接続されたCPU(プロセッサ)15、ROMおよびRAMからなるメモリ16および入出力ポート17を具備する。
【0010】
一方、図1に示されるように、車両1には、各種センサ18、即ち、車両1の状態を検出するセンサおよび車両1の周辺を検出するセンサが設置されている。この場合、車両1の状態を検出するセンサとしては、加速度センサ、速度センサ、方位角センサ、地磁気センサが用いられており、車両1の周辺を検出するセンサとしては、車両1の前方、側方、後方を撮影するカメラ、ライダ(LIDAR)、レーダ等が用いられる。また、車両1には、GNSS(Global Navigation Satellite System:全球測位衛星システム)受信装置19、地図データ記憶装置20、ナビゲーション装置21およびHMI22が設けられている。GNSS受信装置19は、複数の人工衛星から得られる情報に基づいて、車両1の現在位置(例えば車両1の緯度及び経度)を検出することができる。従って、このGNSS受信装置19により車両1の現在位置を取得することができる。このGNSS受信装置19として、例えば、GPS受信装置が用いられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
1か月前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
個人
ホイルのボルト締結
2日前
個人
車輪清掃装置
1か月前
日本精機株式会社
ケース
2か月前
日本精機株式会社
表示装置
3か月前
個人
キャンピングトライク
17日前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
22日前
個人
アンチロール制御装置
3か月前
井関農機株式会社
作業車両
24日前
個人
車両用スリップ防止装置
8日前
個人
ワイパーゴム性能保持具
1か月前
株式会社松華
懸架装置
3か月前
個人
アクセルのソフトウェア
7日前
個人
ブレーキシステム
3か月前
個人
キャンピングトレーラー
17日前
個人
ステージカー
3か月前
株式会社ニフコ
保持装置
1日前
株式会社クラベ
ヒータユニット
1か月前
個人
自動車ドア開度規制ベルト
2か月前
井関農機株式会社
収穫作業車両
1か月前
横浜ゴム株式会社
タイヤ
3か月前
個人
車載小物入れ兼雨傘収納具
今日
日本精機株式会社
車載表示装置
3日前
個人
自走式立体型洗車場
3か月前
トヨタ自動車株式会社
車両
21日前
井関農機株式会社
作業車両
3か月前
株式会社ユーシン
照明装置
3か月前
日本精機株式会社
車両用表示装置
8日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用投影装置
24日前
帝国繊維株式会社
作業車両
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ