TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092476
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2024212453
出願日
2024-12-05
発明の名称
モバイルロボットを含むガス供給システム
出願人
ケーシー カンパニー リミテッド
代理人
個人
,
個人
主分類
G05D
1/667 20240101AFI20250612BHJP(制御;調整)
要約
【課題】ガス供給装置のサイズを小型化できるように、動力供給源を外部に位置づける自動化ガス供給装置を提供する。
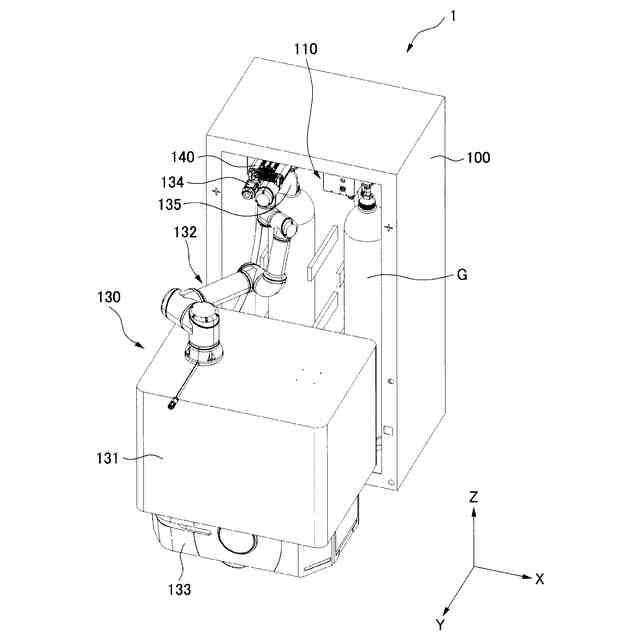
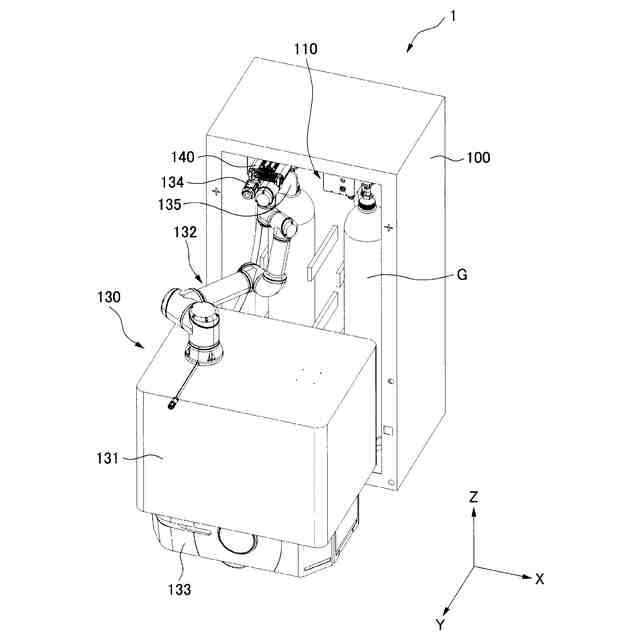
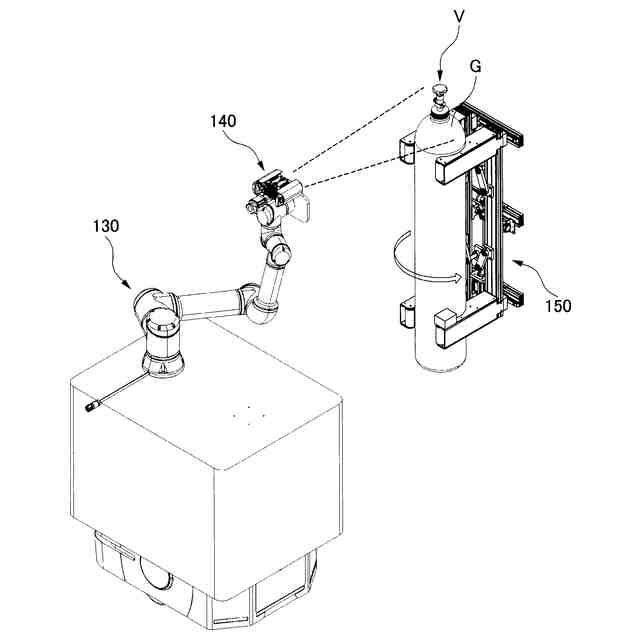
【解決手段】ガス供給システムは、内部にガス容器が配置されるキャビネットと、前記ガス容器に対して移動可能であり、前記ガス容器のバルブに整列されている状態で前記バルブに締結可能な締結装置と、前記締結装置に分離可能に連結され、前記締結装置を移動させるモバイルロボット装置と、イメージを収集する3次元ビジョンカメラと、前記3次元ビジョンカメラが収集したイメージに基づいて、前記モバイルロボット装置の作動を制御するプロセッサを含む。
【選択図】図2
特許請求の範囲
【請求項1】
ガス供給システムであって、
内部にガス容器が配置されるキャビネットと、
前記ガス容器に対して移動可能であり、前記ガス容器のバルブに整列されている状態で前記バルブに締結可能な締結装置と、
前記締結装置に分離可能に連結され、前記締結装置を移動させるモバイルロボット装置と、
イメージを収集する3次元ビジョンカメラと、
前記3次元ビジョンカメラが収集したイメージに基づいて、前記モバイルロボット装置の作動を制御するプロセッサと、
を含み、
前記モバイルロボット装置は、
前記キャビネットの外部で移動可能なボディと、
前記ボディの上部に設けられ、多関節アームで構成されるロボットアームと、
を含み、
前記プロセッサは、
前記3次元ビジョンカメラを介して前記ガス容器のバルブ領域に対する3次元モデルをリアルタイムに生成し、前記生成された3次元モデルをデータベースに格納されたいずれか1つの基準イメージとマッチングし、前記マッチングされた基準イメージに基づいて前記ガス容器のバルブに対する位置及び角度状態を判断し、前記判断結果に基づいて、前記締結装置が前記バルブに対して締結可能な状態に整列するように前記モバイルロボット装置を作動させるように構成される、ガス供給システム。
続きを表示(約 1,600 文字)
【請求項2】
前記プロセッサは、前記ガス容器のバルブ領域に対する3次元モデルを生成する過程において、前記ガス容器のバルブの形状、又は前記バルブに装着されているエンドキャップの形状を含む3次元モデルを生成する、請求項1に記載のガス供給システム。
【請求項3】
前記プロセッサは、前記生成された3次元モデルを前記データベースに格納された複数の基準イメージとそれぞれ比較してイメージ類似度を判別し、前記生成された3次元モデルと最も高いイメージ類似度を有する基準イメージを選別して前記3次元モデルとマッチングするように構成される、請求項1に記載のガス供給システム。
【請求項4】
前記プロセッサは、前記選別された基準イメージに対応する3次元モデルの回転角度及び位置情報に基づいて、前記締結装置が前記ガス容器のバルブに対して締結可能な状態に整列するための3次元座標及び角度に対する整列情報を生成するように構成される、請求項3に記載のガス供給システム。
【請求項5】
前記プロセッサは、前記選別された基準イメージに対応する3次元モデルの回転角度が設定された角度範囲に位置する場合にのみ前記整列情報を生成するように構成される、請求項4に記載のガス供給システム。
【請求項6】
前記プロセッサは、前記選別された基準イメージ及び前記生成された3次元モデルのイメージ類似度が設定された基準値以上である場合にのみ前記整列情報を生成するように構成される、請求項4に記載のガス供給システム。
【請求項7】
前記プロセッサは、前記選別された基準イメージ及び前記生成された3次元モデルのイメージ類似度が設定された基準値未満である場合、前記ガス容器のバルブ領域に対する前記3次元ビジョンカメラの撮像角度が調整されるように制御する、請求項6に記載のガス供給システム。
【請求項8】
前記プロセッサは、前記生成された整列情報に基づいて、前記締結装置が前記ガス容器に対して最適に整列されるようにする移動経路を生成し、前記生成された移動経路により前記締結装置の位置が調節されるよう、前記モバイルロボット装置の作動を制御するように構成される、請求項4に記載のガス供給システム。
【請求項9】
前記プロセッサは、
前記生成された3次元モデル及び前記基準イメージのイメージ類似度を判別する過程において、
前記生成された3次元モデルを2次元に区分した各ピクセルを取得し、前記取得したピクセルを合わせてジオメトリー構造の3次元イメージのピクセルを生成し、
前記生成された3次元モデル及び基準イメージを複数のピクセル領域に区分して個別的にマッチングし、区分されたピクセル領域それぞれに対するマッチング状態に応じて前記イメージ類似度を判断するように構成される、請求項3に記載のガス供給システム。
【請求項10】
前記ガス容器の外周面を支持し、前記ガス容器を地面に垂直な回転軸を中心に回転させることができるクランピング装置をさらに含み、
前記プロセッサは、
前記クランピング装置を介して前記ガス容器を前記回転軸を中心に回転させ、前記ガス容器が前記回転軸を中心に回転するとき、前記3次元ビジョンカメラを介して前記ガス容器のバルブに装着されているエンドキャップのイメージを前記ガス容器の回転角度ごとに取得し、前記取得したエンドキャップのイメージが前記データベースに格納されたエンドキャップの基準イメージと設定された基準値以上のイメージ類似度を有する状態で前記ガス容器の回転を停止するように構成される、請求項1に記載のガス供給システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
以下の実施形態は、モバイルロボットを含む自動化ガス供給システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
一般的にガスを利用する工程、例えば、半導体製造工程のように精密な作業が行われる工程の場合、各工程の目的に適した種類のガスが一定の濃度及び圧力を満たしながら供給されることが求められる。
【0003】
工程中にガスを効率よく供給するために、様々な種類のガスが高圧の状態でガス容器に保管され、人体に有害な成分を含むガスが保管されているガス容器は、厳しい管理下で無人状態に保管される。
【0004】
ガス容器は、ガス供給装置に連結されて内部に保管されているガスを排出し、ガス容器内部のガスを全て消耗すれば、ガス供給装置をガス容器のバルブから分離した後ガス容器を除去し、新しいガス容器をガス供給装置に締結する一連の交替過程が行われる。
【0005】
一方、ガス容器にガス供給装置が連結されるためには、ガス容器のバルブとガス供給装置を整列しなければならないが、ガス容器は高重量の特性上、位置の整列が難しく、ガス供給装置がガス容器のバルブに対して位置整列されるように作動する。そのため、ガス供給装置は、位置調整及び作動のための動力の供給を受けるためのアクチュエーターを含んでいるため、ガスが供給されるキャビネットのサイズは、ガス供給装置を収容するほどのサイズに形成することが求められる。
【0006】
前述した背景技術は、発明者が本明細書の開示内容を導き出す過程で保持したり習得したものであり、必ず本出願前に一般公衆に公開された公知技術とは言えない。
【発明の概要】
【発明が解決しようとする課題】
【0007】
一実施形態の目的は、ガス供給装置のサイズを小型化できるように、動力供給源を外部に位置づける自動化ガス供給装置を提供することにある。
【0008】
一実施形態の目的は、モバイルロボットを通した3次元マッピングを介して、ガス供給装置をガス容器に対して整列させ得る自動化ガス供給装置を提供することにある。
【課題を解決するための手段】
【0009】
一実施形態に係るガス供給システムは、内部にガス容器が配置されるキャビネットと、前記ガス容器に対して移動可能であり、前記ガス容器のバルブに整列されている状態で前記バルブに締結可能な締結装置と、前記締結装置に分離可能に連結され、前記締結装置を移動させるモバイルロボット装置と、イメージを収集する3次元ビジョンカメラと、前記3次元ビジョンカメラが収集したイメージに基づいて、前記モバイルロボット装置の作動を制御するプロセッサとを含む。
【0010】
前記モバイルロボット装置は、前記キャビネットの外部で移動可能なボディと、前記ボディの上部に設けられ、多関節アームで構成されるロボットアームとを含むことができる。前記プロセッサは、前記3次元ビジョンカメラを介して前記ガス容器のバルブ領域に対する3次元モデルをリアルタイムに生成し、前記生成された3次元モデルをデータベースに格納されたいずれか1つの基準イメージとマッチングし、前記マッチングされた基準イメージに基づいて前記ガス容器のバルブに対する位置及び角度状態を判断し、前記判断結果に基づいて、前記締結装置が前記バルブに対して締結可能な状態に整列するように前記モバイルロボット装置を作動させるように構成されることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
28日前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
4日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送設備
28日前
トヨタ自動車株式会社
ペダル機構
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社鷺宮製作所
制御装置
27日前
株式会社オプトン
制御プログラム生成装置
26日前
キヤノン電子株式会社
加工装置、及び、制御方法
13日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社ダイフク
物品搬送設備
19日前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社やまびこ
走行制御装置
3か月前
株式会社ダイフク
物品搬送設備
26日前
株式会社ダイフク
物品搬送設備
26日前
株式会社タブチ
減圧弁
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
26日前
株式会社計数技研
移動体、及びプログラム
2か月前
オムロン株式会社
安全装置
26日前
三菱電機株式会社
電源回路
13日前
WHILL株式会社
電動モビリティ
2か月前
株式会社ダイヘン
搬送車
3か月前
日本信号株式会社
自走式装置
2か月前
株式会社ダイヘン
搬送車
2か月前
ローム株式会社
半導体装置
1か月前
株式会社ダイフク
飛行体制御システム
15日前
個人
ペダル装置、及びペダル装置を具備する自動車
8日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社デンソー
診断装置
2か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ