TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025091651
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207033
出願日
2023-12-07
発明の名称
車両制御装置
出願人
ダイハツ工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/16 20200101AFI20250612BHJP(車両一般)
要約
【課題】停止先行車両に対する停車制御におけるにじり寄りを抑制することができる。
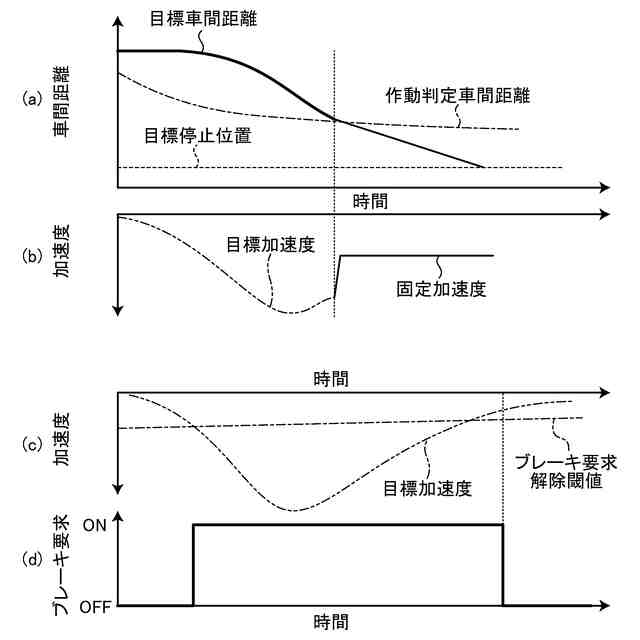
【解決手段】本開示にかかる車両制御装置は、自車両と先行車両との車間距離を一定に維持しながら自車両を走行させる追従走行制御を実行する車両制御装置であって、自車両の前方に停止先行車両が検出されると、目標停車位置へと向かってゼロへと収束していく負の加速度を有する目標加速度を算出する目標加速度計画算出部と、目標加速度が、予め定められたブレーキ要求解除閾値以下となると、自車両に制動を加えて停止させるブレーキ要求を生成するブレーキ要求生成部と、目標加速度がブレーキ要求解除閾値以下となった後、目標加速度をブレーキ要求解除閾値以下に維持する加速度抑制部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
自車両と先行車両との車間距離を一定に維持しながら前記自車両を走行させる追従走行制御を実行する車両制御装置であって、
前記自車両の前方に停止先行車両が検出されると、目標停車位置へと向かってゼロへと収束していく負の加速度を有する目標加速度を算出する目標加速度計画算出部と、
前記目標加速度が、予め定められたブレーキ要求解除閾値以下となると、前記自車両に制動を加えて停止させるブレーキ要求を生成するブレーキ要求生成部と、
前記目標加速度が前記ブレーキ要求解除閾値以下となった後、前記目標加速度を前記ブレーキ要求解除閾値以下に維持する加速度抑制部と、を備える、
車両制御装置。
続きを表示(約 480 文字)
【請求項2】
前記自車両の前方に停止先行車両が検出されると、前記目標停車位置へと向かって収束していく目標車間距離を算出する目標車間距離計画算出部と、
予め定められた一定値の加速度を有する固定加速度を前記自車両に適用した場合に、前記自車両と前記停止先行車両との間に生じうる車間距離を作動車間距離として算出する作動車間距離算出部と、を更に備え、
前記加速度抑制部は、
前記目標車間距離と前記作動車間距離とが一致するタイミングで、前記目標加速度から前記固定加速度にしたがう制御へと前記自車両の制御を切り替える、
請求項1に記載の車両制御装置。
【請求項3】
前記固定加速度にしたがう制御下での前記自車両の予測停車位置を算出する予測停車位置算出部を更に備え、
前記加速度抑制部は、
前記予測停車位置と前記目標停車位置との差が所定の閾値を超えると、前記予測停車位置と前記目標停車位置との差が前記所定の閾値以下となるよう前記固定加速度の値を調整する、
請求項2に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車両における制御の1つに、自車両と先行車両との車間距離を一定に維持しながら自車両を走行させる追従走行制御(ACC:Adaptive Cruise Control)がある。ACCでは、停止先行車両に対して自車両が減速しながら目標位置に停車する停止制御を行うことが可能である。
【先行技術文献】
【特許文献】
【0003】
特開2023-145087号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ACCでは、現在の車間距離および実車速に基づいて目標車間距離を算出し、その目標車間距離に応じた目標加速度を演算し、その目標加速度に基づいて加減速制御することが考えられるが、この場合、自車両が目標停車位置に近づくと、演算した加速度がブレーキのオン/オフを決定する所定の閾値を超えて、ブレーキが解除されてしまう場合がある。これにより、一旦、停車した自車両が再発進し、停止先行車に接近する「にじり寄り」と呼ばれる現象が生じうることがある。
【0005】
本開示は、停止先行車両に対する停車制御におけるにじり寄りを抑制することができる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示にかかる車両制御装置は、自車両と先行車両との車間距離を一定に維持しながら前記自車両を走行させる追従走行制御を実行する車両制御装置であって、前記自車両の前方に停止先行車両が検出されると、目標停車位置へと向かってゼロへと収束していく負の加速度を有する目標加速度を算出する目標加速度計画算出部と、前記目標加速度が、予め定められたブレーキ要求解除閾値以下となると、前記自車両に制動を加えて停止させるブレーキ要求を生成するブレーキ要求生成部と、前記目標加速度が前記ブレーキ要求解除閾値以下となった後、前記目標加速度を前記ブレーキ要求解除閾値以下に維持する加速度抑制部と、を備える。
【発明の効果】
【0007】
本開示にかかる車両制御装置によれば、停止先行車両に対する停車制御におけるにじり寄りを抑制することができる。
【図面の簡単な説明】
【0008】
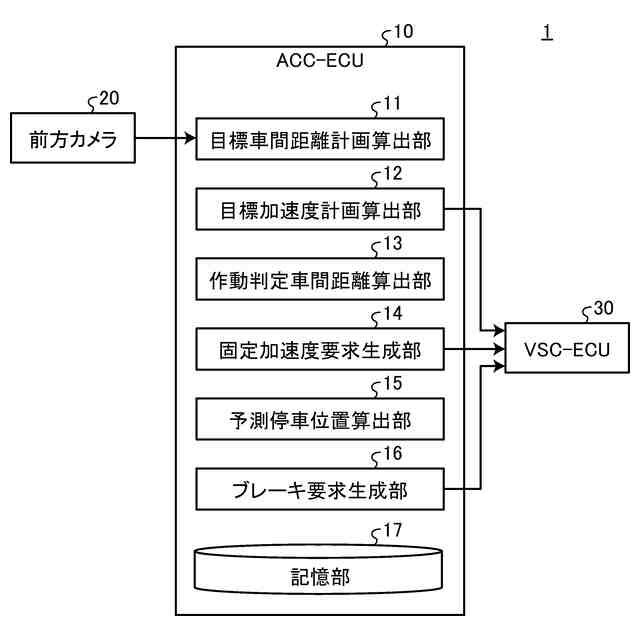
図1は、実施形態にかかる車両制御システムの構成の一例を示すブロック図である。
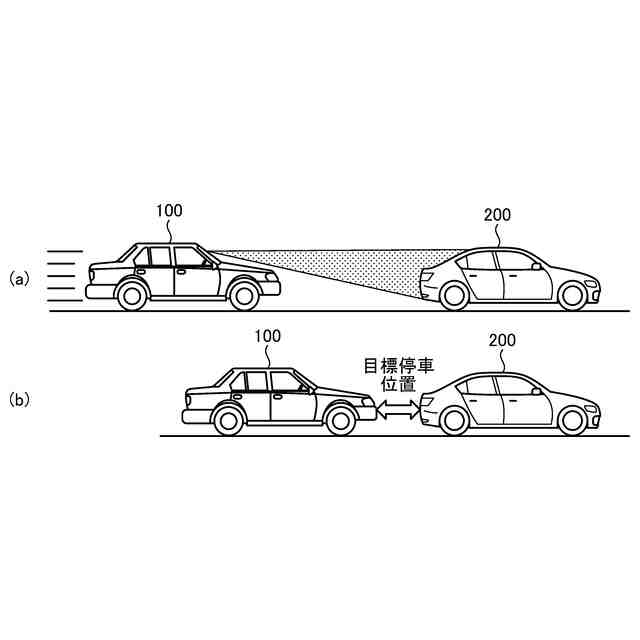
図2は、実施形態にかかる車両制御システムによる制御の一例を示す模式図である。
図3は、実施形態および比較例にかかる車両制御システムにおける停車制御中の自車両の挙動を示すグラフである。
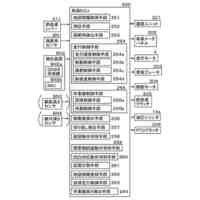
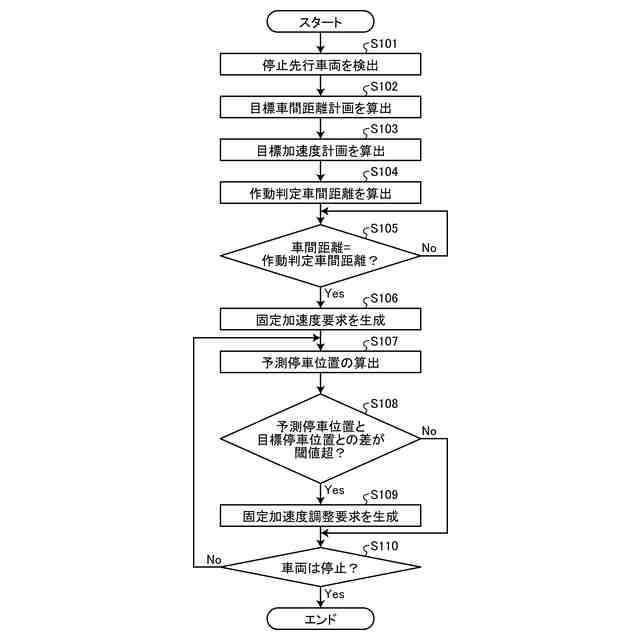
図4は、実施形態にかかるSCM-ECUによるACC適用下の自車両の停止制御の手順の一例を示すフロー図である。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら、本開示にかかる車両制御装置の実施形態について説明する。
【0010】
(車両制御システムの構成例)
図1は、実施形態にかかる車両制御システム1の構成の一例を示すブロック図である。実施形態の車両制御システム1は、自車両に搭載されて、自車両と先行車両との車間距離を一定に維持しながら自車両を走行させる追従走行制御(ACC)を行う。自車両は、例えば図示せぬエンジンや駆動モータを駆動源とする自動車であり、駆動源の出力により加速され、摩擦ブレーキなどのブレーキの制動力により減速されるようになっており、ACCにより加速および減速(加減速)が行われる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
20日前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
日本精機株式会社
ケース
2か月前
個人
車輪清掃装置
24日前
井関農機株式会社
作業車両
12日前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
14日前
日本精機株式会社
照明装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
3か月前
日本精機株式会社
表示装置
2か月前
個人
キャンピングトライク
7日前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
株式会社松華
懸架装置
3か月前
個人
ワイパーゴム性能保持具
1か月前
個人
キャンピングトレーラー
7日前
個人
ブレーキシステム
2か月前
株式会社クラベ
ヒータユニット
1か月前
個人
自動車ドア開度規制ベルト
2か月前
井関農機株式会社
収穫作業車両
1か月前
個人
自走式立体型洗車場
3か月前
個人
ステージカー
3か月前
横浜ゴム株式会社
タイヤ
2か月前
マツダ株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
3か月前
井関農機株式会社
作業車両
4日前
日本精機株式会社
車両用表示装置
3か月前
株式会社ユーシン
照明装置
2か月前
日本精機株式会社
車両用投影装置
14日前
井関農機株式会社
作業車両
4日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用投影装置
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ