TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025090123
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205154
出願日
2023-12-05
発明の名称
制御装置、学習装置、及び訓練データ生成装置
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250610BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットハンドを用いた質の高い把持を実現することを可能とする制御装置を提供する。
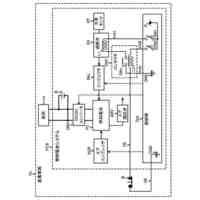
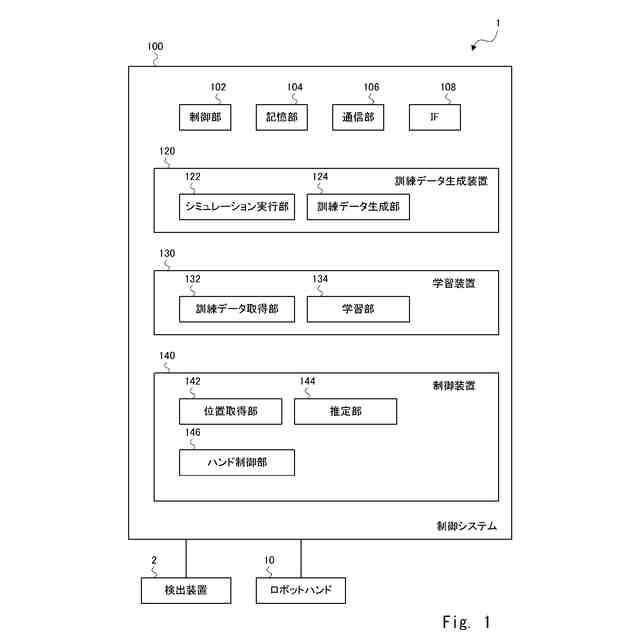
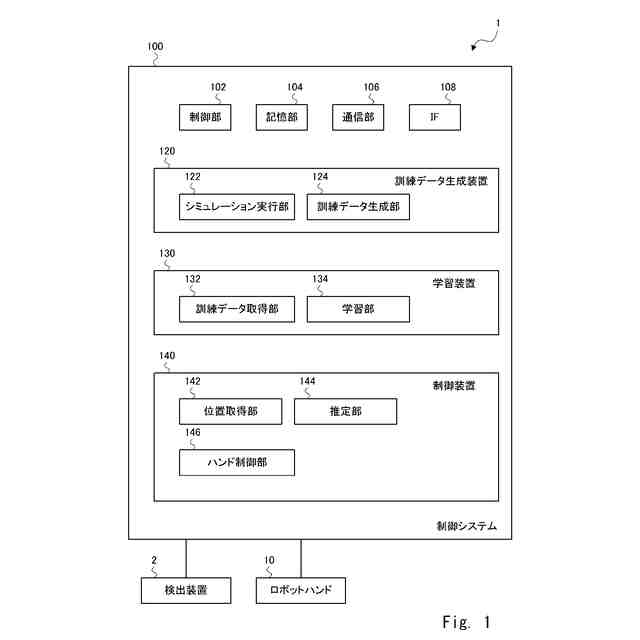
【解決手段】制御装置140は、推定部144とハンド制御部146とを有する。推定部144は、予め機械学習によって生成された推論モデルを用いて、三次元空間におけるロボットハンドの基準点の位置に対する、ロボットハンド10が物体を把持するときの把持の品質を示すスコアと、把持を実行可能か否かを示すマスク値とを、三次元空間の各位置について推定する。ハンド制御部146は、マスク値が把持を実行可能であることを示す位置について、スコアに基づいてロボットハンド10の制御を行う。
【選択図】図1
特許請求の範囲
【請求項1】
予め機械学習によって生成された推論モデルを用いて、三次元空間におけるロボットハンドの基準点の位置に対する、前記ロボットハンドが物体を把持するときの把持の品質を示すスコアと、把持を実行可能か否かを示すマスク値とを、三次元空間の各位置について推定する推定部と、
前記マスク値が把持を実行可能であることを示す位置について、前記スコアに基づいて前記ロボットハンドの制御を行うハンド制御部と、
を有する制御装置。
続きを表示(約 750 文字)
【請求項2】
前記スコアは、前記物体に加えられる外力に抗して前記ロボットハンドが把持を実行する際に、把持を維持することが可能な前記外力の最大値に対応する、
請求項1に記載の制御装置。
【請求項3】
前記推定部は、前記推論モデルによって、前記物体を把持する際の前記ロボットハンドの把持姿勢を示す姿勢データさらに推定し、
前記ハンド制御部は、推定された前記姿勢データに基づいて前記ロボットハンドの姿勢の制御を行う、
請求項1に記載の制御装置。
【請求項4】
物体が配置された三次元空間の各位置を示す位置データを入力データとし、各位置それぞれにロボットハンドの基準点がある場合の、前記ロボットハンドが前記物体を把持するときの把持の品質を示すスコアと、把持を実行可能か否かを示すマスク値とを出力データとする訓練データを取得する訓練データ取得部と、
機械学習を実行することによって、前記入力データが入力されて前記出力データを出力するような推論モデルを生成する学習部と、
を有する学習装置。
【請求項5】
物体が配置された三次元空間で物体の把持が行われるように物理シミュレーションを実行するシミュレーション実行部と、
機械学習を実行することによって推論モデルを生成するために使用される訓練データであって、前記物理シミュレーションによって実現される三次元空間の各位置それぞれにロボットハンドの基準点がある場合の、前記ロボットハンドが前記物体を把持するときの把持の品質を示すスコアと把持を実行可能か否かを示すマスク値とを示す訓練データを生成する訓練データ生成部と、
を有する訓練データ生成装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、学習装置、及び訓練データ生成装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、推定装置を開示する。特許文献1にかかる推定装置は、ターゲット物体を把持可能な把持装置の位置及び姿勢に関する情報を出力するニューラルネットワークモデルにターゲット物体に関する情報を入力し、把持装置がターゲット物体を把持可能な位置及び姿勢に関する情報を推定する。非特許文献1は、TSDF(Truncated Signed Distance Function)ボリュームを入力としてボクセルごとの把持成功確率及び把持方向を出力するニューラルネットワークを開示する。
【先行技術文献】
【特許文献】
【0003】
特開2019-164836号公報
【非特許文献】
【0004】
Michel Breyer, Jen Jen Chung, Lionel Ott, Roland Siegwart, Juan Nieto、「Volumetric Grasping Network: Real-time 6 DOF Grasp Detection in Clutter」、Conference on Robot Learning, 2020、URL:https://arxiv.org/abs/2101.01132
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1にかかる技術では、把持可能な把持装置の位置が、把持に適した位置であるのかを推定することができないおそれがある。言い換えると、特許文献1にかかる技術では、把持可能な把持装置の位置で把持装置が実際に質の高い把持を行うことができるのかを推定することができないおそれがある。
【0006】
本開示は、ロボットハンドを用いた質の高い把持を実現することを可能とする制御装置、学習装置、訓練データ生成装置を提供する。
【課題を解決するための手段】
【0007】
本開示にかかる制御装置は、予め機械学習によって生成された推論モデルを用いて、三次元空間におけるロボットハンドの基準点の位置に対する、前記ロボットハンドが物体を把持するときの把持の品質を示すスコアと、把持を実行可能か否かを示すマスク値とを、三次元空間の各位置について推定する推定部と、前記マスク値が把持を実行可能であることを示す位置について、前記スコアに基づいて前記ロボットハンドの制御を行うハンド制御部と、を有する。
【発明の効果】
【0008】
本開示によれば、ロボットハンドを用いた質の高い把持を実現することを可能とする制御装置、学習装置、訓練データ生成装置を提供できる。
【図面の簡単な説明】
【0009】
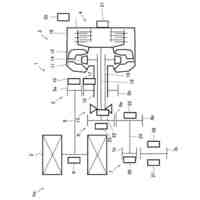
実施の形態1にかかる把持システムの構成を示す図である。
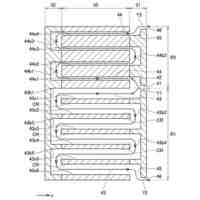
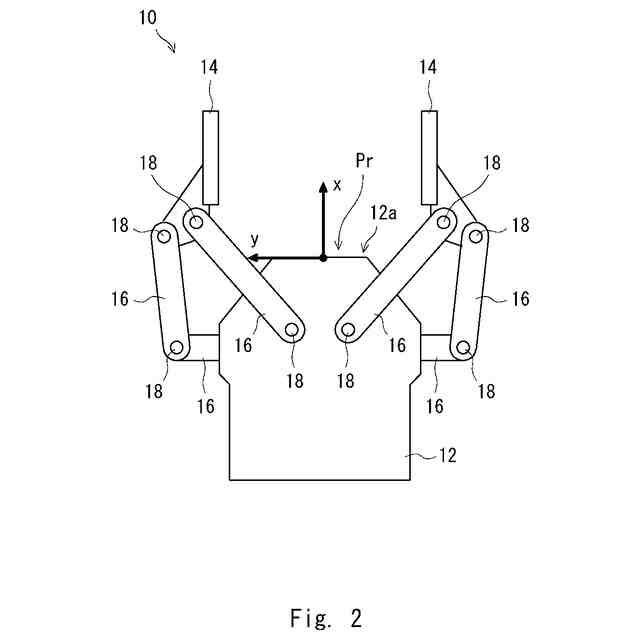
実施の形態1にかかるロボットハンドを例示する図である。
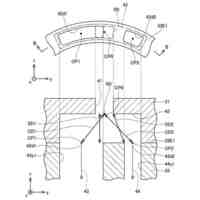
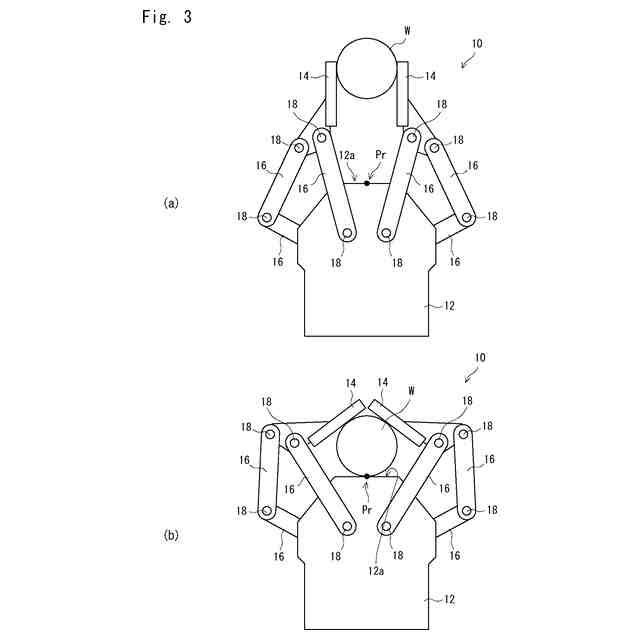
実施の形態1にかかるロボットハンドの把持動作を説明するための図である。
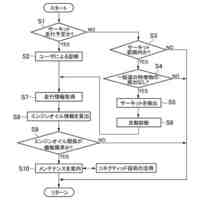
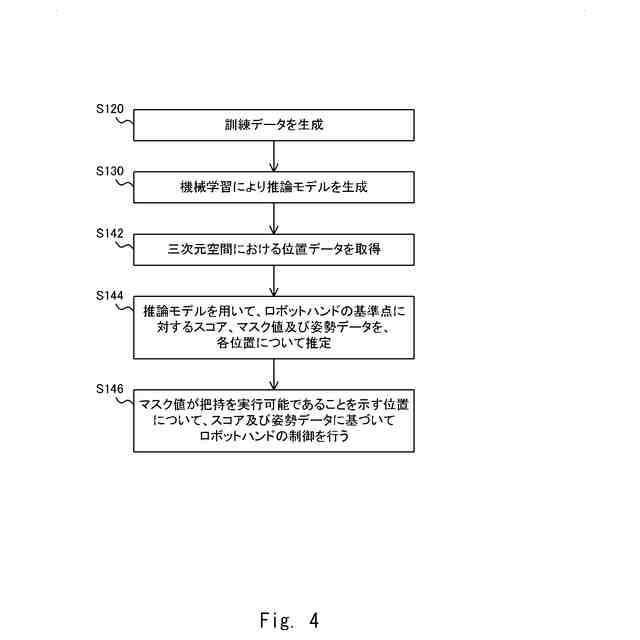
実施の形態1にかかる把持システムによって実行される処理を示すフローチャートである。
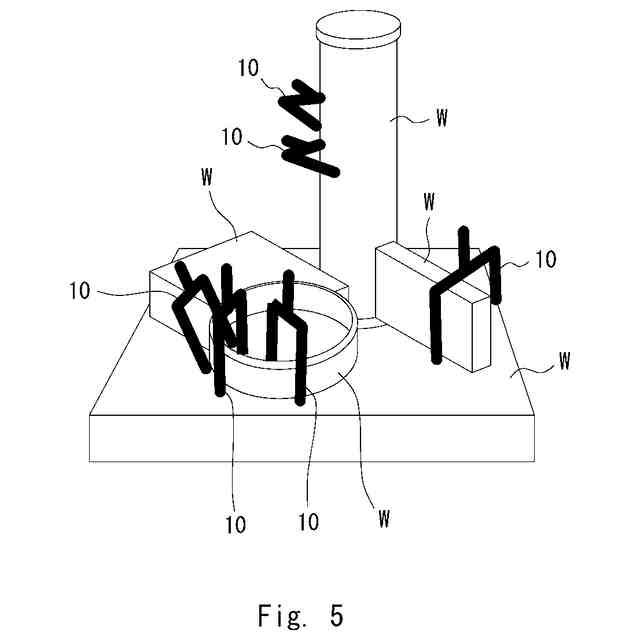
実施の形態1にかかる物理シミュレーションを例示する図である。
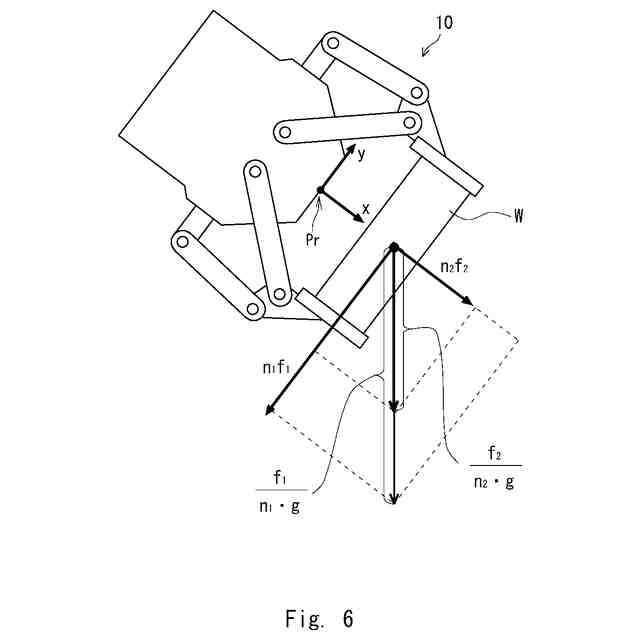
実施の形態1にかかるスコアについて説明するための図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して本実施の形態について説明する。但し、本発明が以下の実施の形態に限定されるわけではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
車載用充電器
今日
トヨタ自動車株式会社
エンジン装置
6日前
トヨタ自動車株式会社
充電制御装置
今日
トヨタ自動車株式会社
ハイブリッド車
6日前
トヨタ自動車株式会社
モータユニット
今日
トヨタ自動車株式会社
モータユニット
今日
トヨタ自動車株式会社
車両の制御装置
6日前
トヨタ自動車株式会社
車両の動力伝達装置
6日前
トヨタ自動車株式会社
車両の充電システム
今日
トヨタ自動車株式会社
電気機器の取付構造
6日前
トヨタ自動車株式会社
充電装置の故障検出回路
今日
トヨタ自動車株式会社
プラグインハイブリッド車両
今日
トヨタ自動車株式会社
プラグインハイブリッド車両
今日
トヨタ自動車株式会社
プラグインハイブリッド車両
今日
トヨタ自動車株式会社
プラグインハイブリッド車両
今日
トヨタ自動車株式会社
プラグインハイブリッド車両
今日
株式会社豊田自動織機
燃料電池システム及び産業車両
今日
トヨタ自動車株式会社
電極活物質、電極合材、電池、および、これらの製造方法
6日前
トヨタ自動車株式会社
ハイブリッド車、ハイブリッド車の制御方法、給電モード設定システム、給電モード設定方法
6日前
トヨタ自動車株式会社
情報処理装置、情報処理方法、及び、システム
6日前
トヨタ自動車株式会社
車両用表示制御装置、表示方法及びプログラム
6日前
株式会社デンソー
端末、基地局及び無線通信方法
1日前
株式会社デンソー
通信装置、基地局、及び通信方法
1日前
トヨタ紡織株式会社
車両荷室構造および車両用第2デッキ構築セット
6日前
トヨタ自動車株式会社
車両用表示制御装置、車両用表示装置、車両、車両用表示制御方法及び車両用表示制御プログラム
6日前
株式会社ザイテック
吸着装置
20日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
9日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
個人
ペグハンマおよびペグハンマ用部品
13日前
株式会社ダイヘン
搬送装置
13日前
住友重機械工業株式会社
教示装置
6日前
川崎重工業株式会社
ロボット
7日前
東京都公立大学法人
対象物把持装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ