TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089942
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204925
出願日
2023-12-04
発明の名称
骨格モデルの姿勢決定方法及びプログラム
出願人
株式会社セルシス
代理人
個人
,
個人
主分類
G06T
13/40 20110101AFI20250609BHJP(計算;計数)
要約
【課題】仮想空間のキャラクタ又は実空間のロボットなどが持つ骨の姿勢を、より容易にかつ的確に決定する骨格モデルの姿勢決定方法及びプログラムを提供する。
【解決手段】姿勢決定方法は、親骨と子骨とが関節によって連結された骨格モデルにおいて、親骨に対する子骨の姿勢を表現する複数のパラメータのうちの少なくとも一つのパラメータについて判定を行うことと、判定に基づいて複数のパラメータを修正することと、修正された複数のパラメータを用いて、子骨の姿勢を決定することと、を有する。判定を行うことは、複数のパラメータのうちのいずれかが、第1の制限を超えるか否かの判定を行う。第1の制限は、少なくとも一つのパラメータが他の二つ以上のパラメータに係る制限に影響を与える制限で表されること、を含み、第1の制限を超えるとの判定である場合、複数のパラメータが第1の制限の範囲内となるように、複数のパラメータを修正する。
【選択図】図19
特許請求の範囲
【請求項1】
親骨と子骨とが関節によって連結された骨格モデルにおいて、前記親骨に対する前記子骨の姿勢を表現する複数のパラメータによって前記子骨の姿勢を決定する姿勢決定方法であって、
前記複数のパラメータのうちの少なくとも一つのパラメータについて判定を行うことと、
前記判定に基づいて前記複数のパラメータを修正することと、
修正された前記複数のパラメータを用いて、前記子骨の姿勢を決定することと、
を有し、
前記判定を行うことは、前記複数のパラメータのうちのいずれかが、第1の制限を超えるか否かの判定を行うことであって、前記第1の制限は、少なくとも一つのパラメータが他の二つ以上のパラメータに係る制限に影響を与える制限で表される、第1の判定を行うこと、を含み
前記複数のパラメータを修正することは、前記第1の判定が、前記第1の制限を超えるとの判定である場合、前記複数のパラメータが前記第1の制限の範囲内となるように、前記第1の制限を用いて前記複数のパラメータを修正すること、を含む、
姿勢決定方法。
続きを表示(約 1,100 文字)
【請求項2】
前記第1の制限は、少なくとも一つのパラメータの増加又は減少に対して、他の二つ以上のパラメータの範囲がいずれも単調減少する制限を含む制限である、
請求項1に記載の姿勢決定方法。
【請求項3】
前記複数のパラメータは、三つのパラメータであり、
前記三つのパラメータの各パラメータを互いに直交する座標軸とする三次元空間で、前記第1の制限は、一つの方向に沿って、断面積が単調減少する立体形状を含む形状による制限である、
請求項1に記載の姿勢決定方法。
【請求項4】
前記立体形状は錐体である、
請求項3に記載の姿勢決定方法。
【請求項5】
前記立体形状は錐体の一部である、
請求項3に記載の姿勢決定方法。
【請求項6】
前記立体形状は、底面の形状が面積を持ち、前記底面から前記一つの方向に所定の距離だけ離れた位置に存在する線分又は曲線を上端の形状とする立体形状である、
請求項3に記載の姿勢決定方法。
【請求項7】
前記立体形状は、底面の形状が面積を持ち、前記底面から前記一つの方向に所定の距離だけ離れた位置に存在する線分又は曲線を上端の形状とする立体形状の一部である、
請求項3に記載の姿勢決定方法。
【請求項8】
前記一つの方向にパラメータが変化することによる前記骨格モデルのポーズの変化は、予め設定された前記骨格モデルの初期ポーズから離れる方向のポーズの変化である、
請求項3に記載の姿勢決定方法。
【請求項9】
前記第1の制限は、前記断面積が単調減少する立体形状を組み合わせた形状を含む、
請求項3に記載の姿勢決定方法。
【請求項10】
前記骨格モデルの変形に、インバースキネマティクスが適用されているか否かの検知を実行すること、を前記判定を行うことの前にさらに有し、
前記判定を行うことは、前記検知が、インバースキネマティクスが適用されていないことを示す場合に、前記複数のパラメータのうちのいずれかが、第2の制限を超えるか否かの判定を行うことであって、前記第2の制限は前記第1の制限の範囲を包含する、第2の判定を行うこと、をさらに含み、
前記複数のパラメータを修正することは、前記検知が、インバースキネマティクスが適用されていないことを示す場合に、前記第2の判定が、前記第2の制限を超えるとの判定である場合、前記複数のパラメータが前記第2の制限の範囲内となるように、前記第2の制限を用いて前記複数のパラメータを修正すること、をさらに含む、
請求項1に記載の姿勢決定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の技術は、骨格モデルの姿勢決定方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
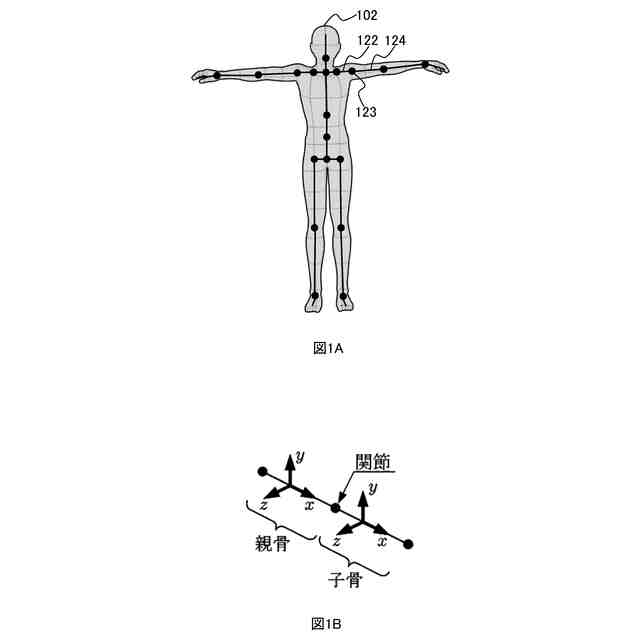
コンピュータの画面などにおいて、仮想空間上のキャラクタのポーズやアニメーションを作る技術が存在する。この際に、複数の骨を関節で繋いだ骨格モデル(スケルトンモデル)が使われる場合がある。このような骨格モデルは、仮想空間ばかりでなく、ロボット制御等の実空間における対象物を制御する場合にも用いられ得る。
【0003】
例えば、親骨と子骨とが関節によって連結された骨格モデルの姿勢を制御するように、関節を中心点とする球面上の所与の点を焦点とし、該中心点と該焦点とを結ぶ軸に直交する平面を射影面とし、関節の可動範囲を、射影面上において設定する技術が存在する(例えば、特許文献1参照)。
【0004】
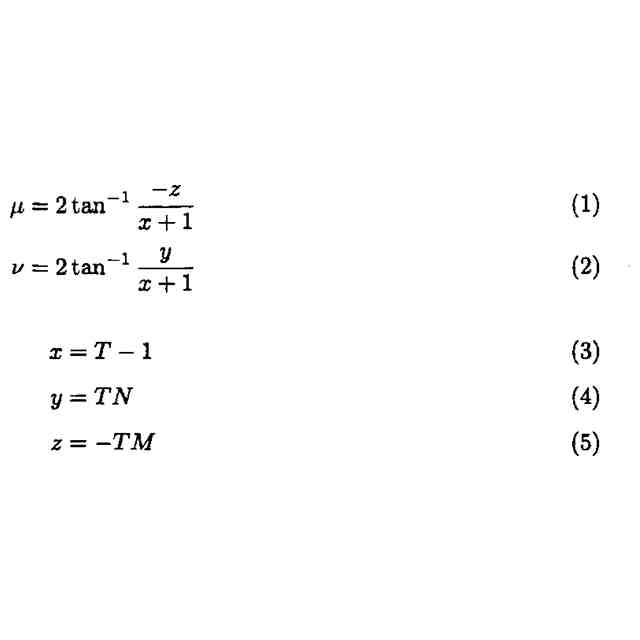
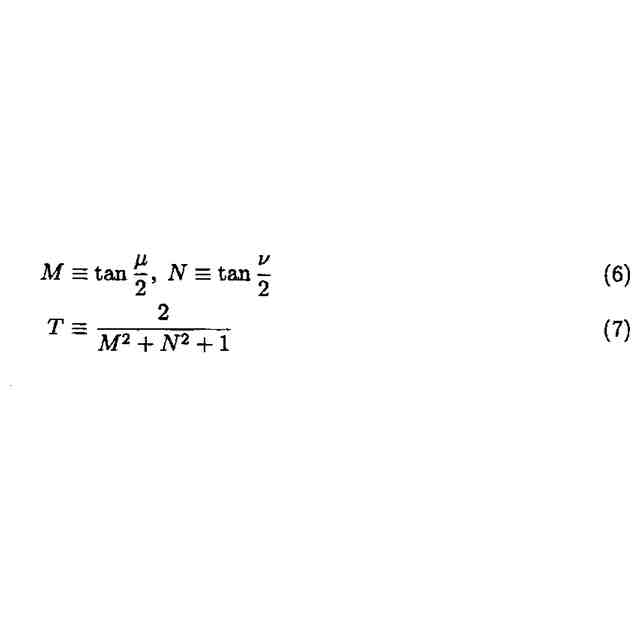
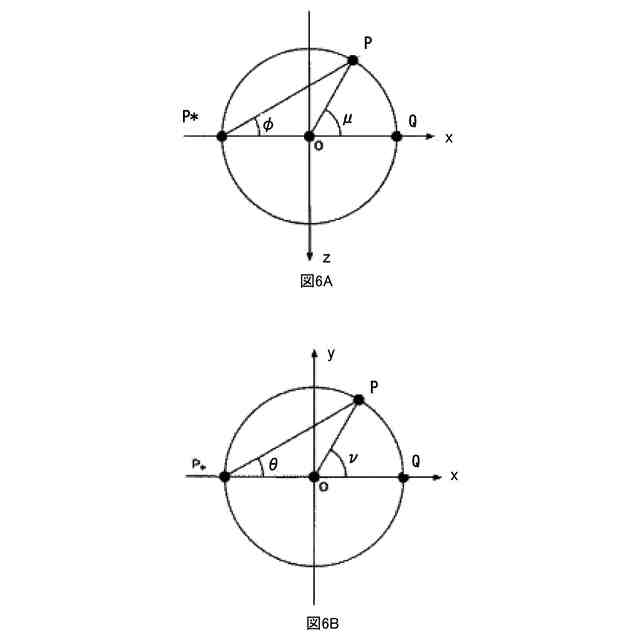
また、親骨に対する子骨の関節における角度範囲を制限することによって子骨の動作を制御するように、関節を中心とする球の球面上に、子骨の角度範囲の境界を定義する角度範囲境界円を設定する。そして、角度範囲境界円は、関節を中心とする球面と親骨または親骨の延長線との交点1を通るものであり、関節を原点とし、交点1から原点に向かう方向をx軸の正方向とする、三次元直交座標系(x、y、z)から、μ=2tan
-1
(-z/(x+1))、ν=2tan
-1
(y/(x+1))の関係を有する、モノポーラ球面座標系(μ、ν)を用いる技術が存在する(例えば、特許文献2参照)。
しかしながら、従来の技術では、例えば人間などのキャラクタを含め、多くの種類のキャラクタの骨の曲げ又は捻りの姿勢を決定することは容易ではなかった。
【先行技術文献】
【特許文献】
【0005】
特開2009-70340号公報
特開2012-164162号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
開示の技術は、仮想空間において人間などを仮想的に表現するキャラクタ、又は実空間に実在するロボットなどが持つ骨の姿勢を、より容易にかつ的確に決定できる技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
開示の技術は、親骨と子骨とが関節によって連結された骨格モデルにおいて、前記親骨に対する前記子骨の姿勢を表現する複数のパラメータによって前記子骨の姿勢を決定する姿勢決定方法であって、
前記複数のパラメータのうちの少なくとも一つのパラメータについて判定を行うことと、
前記判定に基づいて前記複数のパラメータを修正することと、
修正された前記複数のパラメータを用いて、前記子骨の姿勢を決定することと、
を有し、
【0008】
前記判定を行うことは、前記複数のパラメータのうちのいずれかが、第1の制限を超えるか否かの判定を行うことであって、前記第1の制限は、少なくとも一つのパラメータが他の二つ以上のパラメータに係る制限に影響を与える制限で表される、第1の判定を行うこと、を含み
【0009】
前記複数のパラメータを修正することは、前記第1の判定が、前記第1の制限を超えるとの判定である場合、前記複数のパラメータが前記第1の制限の範囲内となるように、前記第1の制限を用いて前記複数のパラメータを修正すること、を含む、
姿勢決定方法を提供することができる。
【0010】
また、前記第1の制限は、少なくとも一つのパラメータの増加又は減少に対して、他の二つ以上のパラメータの範囲がいずれも単調減少する制限を含む制限であってもよい。
また、前記複数のパラメータは、三つのパラメータであり、
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
13日前
個人
政治のAI化
1か月前
個人
情報処理装置
13日前
個人
物品給付年金
1か月前
個人
RFタグ読取装置
1か月前
個人
人物再現システム
2か月前
個人
在宅介護システム
1か月前
個人
記入設定プラグイン
1日前
個人
情報処理装置
9日前
個人
プラグインホームページ
27日前
個人
情報入力装置
13日前
個人
AI飲食最適化プラグイン
2か月前
個人
物価スライド機能付生命保険
13日前
キヤノン株式会社
通信装置
1か月前
有限会社ノア
データ読取装置
2か月前
個人
マイホーム非電子入札システム
13日前
個人
電話管理システム及び管理方法
2か月前
株式会社BONNOU
管理装置
6日前
個人
全アルゴリズム対応型プログラム
1か月前
キヤノン株式会社
画像処理装置
1か月前
個人
日誌作成支援システム
2か月前
個人
決済手数料0%のクレジットカード
16日前
シャープ株式会社
電子機器
1か月前
大同特殊鋼株式会社
輝線検出方法
1か月前
株式会社CROSLAN
支援装置
1か月前
サクサ株式会社
カードの制動構造
15日前
ミサワホーム株式会社
宅配ロッカー
1か月前
トヨタ自動車株式会社
情報処理装置
19日前
村田機械株式会社
割当補助システム
19日前
株式会社アジラ
データ転送システム
1か月前
トヨタ自動車株式会社
欠け検査装置
1か月前
ひびきの電子株式会社
認証システム
1か月前
パテントフレア株式会社
交差型バーコード
29日前
長屋印刷株式会社
画像形成システム
1か月前
ミサワホーム株式会社
情報処理装置
1か月前
株式会社ライト
情報処理装置
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ