TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089662
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204419
出願日
2023-12-04
発明の名称
電動車両の駆動力制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20250609BHJP(車両一般)
要約
【課題】波状路への進入時に駆動力源のトルクを適切に制御することにより、車両の振動や歯車の歯打ち音を抑制できる電動車両の駆動力制御装置を提供する。
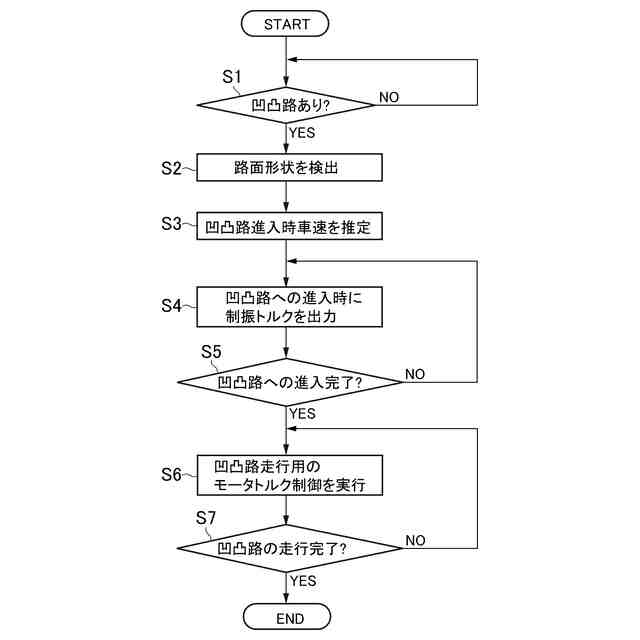
【解決手段】電動車両の前方の凹凸路における路面形状を検出し(ステップS2)、電動車両が凹凸路に進入する時点における車速と、検出された凹凸路の路面形状とに基づいて、電動車両に入力される外力の振動周波数に基づいた制振トルクを、電動車両を走行させるための駆動トルクに加算して、電動車両が凹凸路に進入する以前のモータの出力トルクを設定する(ステップS4)。
【選択図】図1
特許請求の範囲
【請求項1】
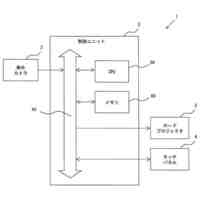
駆動力源としてのモータと、前記モータのトルクを制御するコントローラとを備えた電動車両の駆動力制御装置であって、
前記コントローラは、
前記電動車両の前方の凹凸路における路面形状を検出する路面形状検出部と、
前記電動車両が前記凹凸路に進入する時点における車速と、前記路面形状検出部によって検出された前記凹凸路の路面形状とに基づいて、前記電動車両に入力される外力の振動周波数を算出する周波数算出部と、
前記周波数算出部によって算出された振動周波数に基づいた制振トルクを、前記電動車両を走行させるための駆動トルクに加算して、前記電動車両が前記凹凸路に進入する以前の前記モータの出力トルクを設定するトルク設定部とを備えている
ことを特徴とする電動車両の駆動力制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動力源としてのモータを備えた電動車両の駆動力制御装置に関し、特に、凹凸路への進入時の駆動力を制御する装置に関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
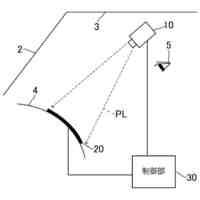
特許文献1には、カメラによって撮影された画像データと学習済みモデルとに基づいて、車両前方に波状路があるか否かを判定し、波状路があることが判定された場合に、その波状路を走行する以前に駆動力源であるモータのトルクを低下させるように構成された車両の制御装置が記載されている。また、この制御装置は、画像データに基づく波状路の判定手段に加えて、駆動輪の回転速度に基づいて波状路を判定する手段を備え、画像データに基づく波状路の判定結果と、駆動輪の回転速度に基づく波状路の判定結果とが相違した場合には、画像データに基づく波状路の判定手段の判定精度を向上させるために、駆動輪の回転速度に基づく波状路の判定結果を教師データとして学習済みモデルを再学習させるように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-177546号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された制御装置は、波状路の走行時にパワートレーンに作用する負荷を低減するために駆動力源のトルクを低下させるものであるから、車両の前方に波状路があるか否かを判定している。しかしながら、波状路の有無を判定して、駆動力源のトルクを低減したとしても、波状路の走行時に振動が発生し、またはパワートレーンを構成する歯車の歯打ち音が発生する可能性がある。
【0005】
本発明は、上記の技術的課題に着目してなされたものであって、波状路への進入時に駆動力源のトルクを適切に制御することにより、車両の振動や歯車の歯打ち音を抑制できる電動車両の駆動力制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
本発明は、上記の目的を達成するために、駆動力源としてのモータと、前記モータのトルクを制御するコントローラとを備えた電動車両の駆動力制御装置であって、前記コントローラは、前記電動車両の前方の凹凸路における路面形状を検出する路面形状検出部と、前記電動車両が前記凹凸路に進入する時点における車速と、前記路面形状検出部によって検出された前記凹凸路の路面形状とに基づいて、前記電動車両に入力される外力の振動周波数を算出する周波数算出部と、前記周波数算出部によって算出された振動周波数に基づいた制振トルクを、前記電動車両を走行させるための駆動トルクに加算して、前記電動車両が前記凹凸路に進入する以前の前記モータの出力トルクを設定するトルク設定部とを備えていることを特徴とするものである。
【発明の効果】
【0007】
本発明によれば、電動車両の前方の凹凸路における路面形状を検出し、電動車両が凹凸路に進入する時点における車速と、凹凸路の路面形状とに基づいて電動車両に入力される外力の振動周波数を算出する。すなわち、電動車両が凹凸路を走行し始める以前から、凹凸路の走行中に電動車両に入力される外力の振動周波数を推定する。そして、その振動周波数に基づいた制振トルクを、電動車両を走行させるための駆動トルクに加算して、電動車両が凹凸路に進入する以前のモータの出力トルクを設定することにより、凹凸路を走行し始める時点から、電動車両が振動することを抑制でき、モータから駆動輪に至るパワートレーンを構成する歯車が周期的に接触して生じる歯打ち音を抑制できる。
【図面の簡単な説明】
【0008】
本発明の実施形態における駆動力制御装置で実行する制御の一例を説明するためのフローチャートである。
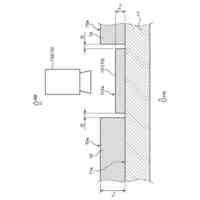
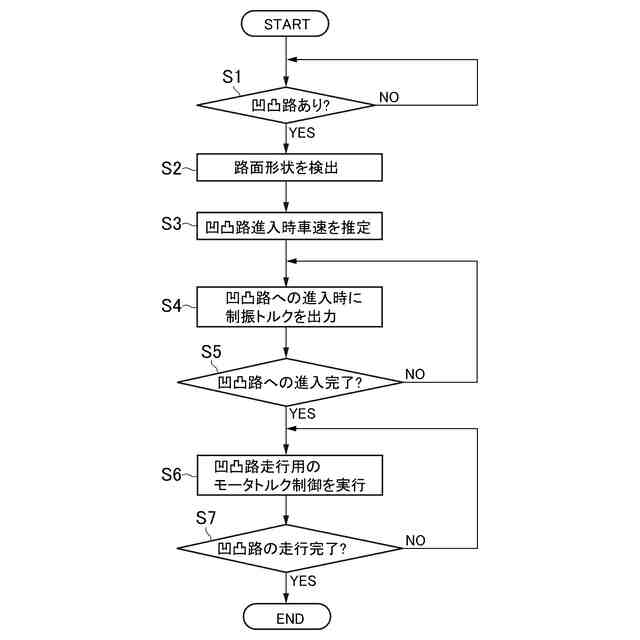
凹凸路の路面形状に基づいて車両に入力される外力の振動周波数を求める手段を説明するための図であり、(a)は路面形状を示し、(b)はその路面を走行する間に車両に入力される外力の変化を示す図である。
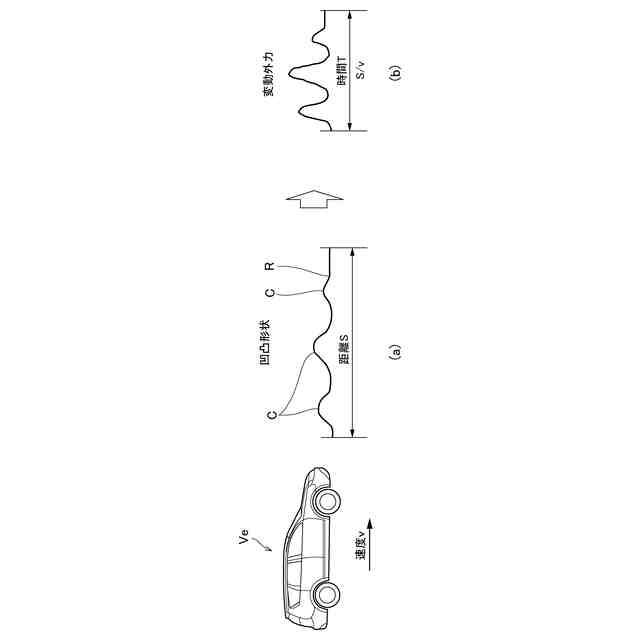
凹凸路における凸部のピッチ間距離に基づいて車両に入力される外力の振動周波数を求める手段を説明するための図であり、(a)は上面図を示し、(b)は路面の側面図を示す図である。
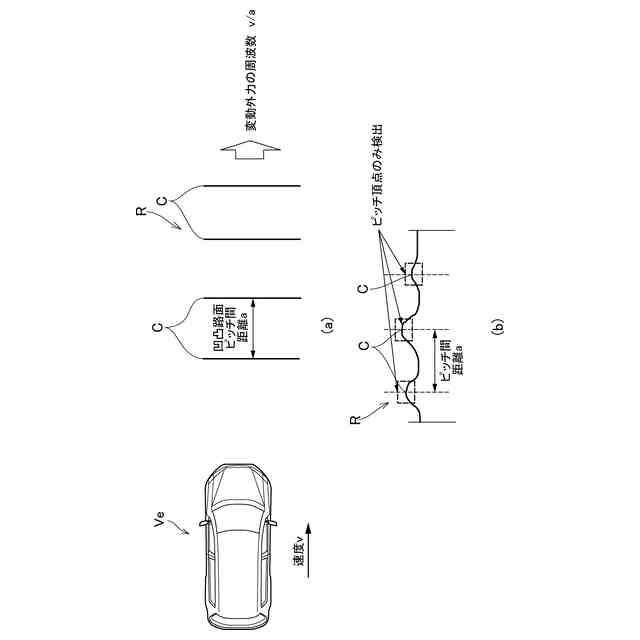
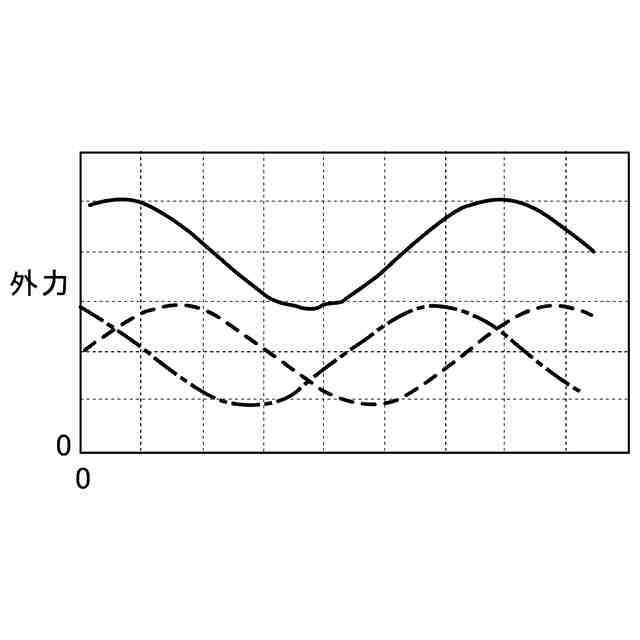
車両の進行方向に対して凸部が傾いた凹凸路を走行する際に、左右輪に作用する外力の周波数を求める手段を説明するための図であり、(a)は上面図を示し、(b)は、各車輪に作用する外力の変動を示す図である。
左右輪に作用する外力を合算して車両に作用する外力の変動を求める手段を示す図である。
【発明を実施するための形態】
【0009】
本発明を図に示す実施形態に基づいて説明する。なお、以下に説明する実施形態は本発明を具体化した場合の一例に過ぎないのであって、本発明を限定するものではない。
【0010】
本発明の実施形態における電動車両は、一対の前輪または一対の後輪のいずれか一方の駆動力源としてのモータを備えた電動車両であってもよく、一対の前輪と一対の後輪とのそれぞれに駆動力源としてのモータを備えた、いわゆる四輪駆動車であってもよく、さらに、四輪のそれぞれに駆動力源としてのモータを備えた電動車両であってもよい。また、一対の前輪または一対の後輪のいずれか一方の駆動力源としてモータを備え、他方の駆動力源としてエンジンを備えたハイブリッド車両であってもよい。またさらに、運転者によるアクセル操作やブレーキ操作に基づいて駆動トルクや制動トルクの目標値を設定する手動運転車両において、走行環境に応じて駆動トルクや制動トルクの目標値を補正する運転支援が可能な車両であってもよく、運転者がアクセル操作やブレーキ操作を行うことなく駆動トルクや制動トルクを制御する自動運転車両であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
4か月前
個人
カーテント
21日前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
25日前
日本精機株式会社
ケース
2か月前
井関農機株式会社
作業車両
13日前
個人
キャンピングトライク
8日前
個人
アンチロール制御装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
15日前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
照明装置
3か月前
個人
ワイパーゴム性能保持具
1か月前
個人
ブレーキシステム
2か月前
株式会社松華
懸架装置
3か月前
個人
キャンピングトレーラー
8日前
井関農機株式会社
収穫作業車両
1か月前
個人
自走式立体型洗車場
3か月前
横浜ゴム株式会社
タイヤ
2か月前
株式会社クラベ
ヒータユニット
1か月前
個人
自動車ドア開度規制ベルト
2か月前
個人
ステージカー
3か月前
日本精機株式会社
車両用表示装置
1か月前
トヨタ自動車株式会社
車両
12日前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
マツダ株式会社
車両
3か月前
日本精機株式会社
車両用投影装置
15日前
マツダ株式会社
車両
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ