TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087570
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2024102646
出願日
2024-06-26
発明の名称
物体検出装置及び物体検出方法
出願人
株式会社JVCケンウッド
代理人
個人
主分類
G06T
7/00 20170101AFI20250603BHJP(計算;計数)
要約
【課題】歩行者、自転車やオートバイなどに乗車した人物を適切に認識可能である物体検出装置及び物体検出方法を提供する。
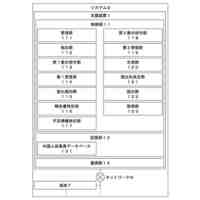
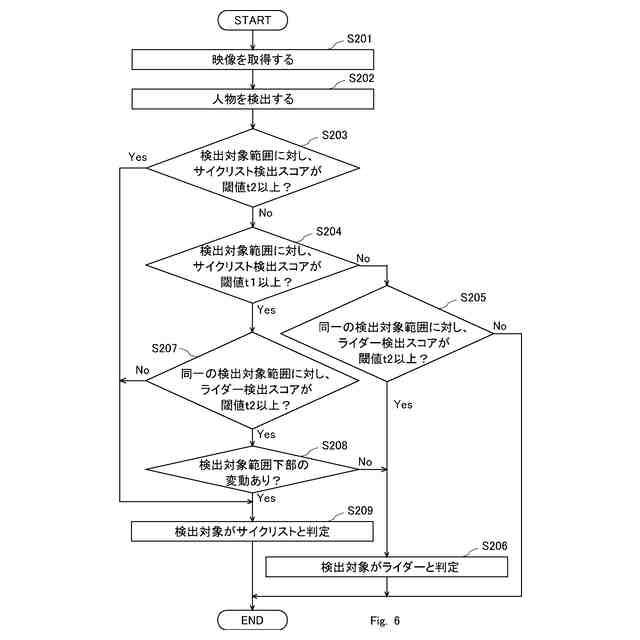
【解決手段】本開示に係る物体検出装置100は、撮影映像を取得する映像取得部110と、前記映像に対して人物の第一形態の映像を学習させた第一形態検出モデルおよび人物の第二形態の映像を学習させたサイクリスト検出モデルを用いて、前記第一形態の人物または前記第二形態の人物を検出する物体検出部120と、前記映像における検出結果に基づき、前記第一形態検出モデルによる検出スコアが第一閾値以上であり、かつ前記第二形態検出モデルによる検出スコアが前記第一閾値より高い値である第二閾値以上である検出対象範囲に対して、前記検出対象範囲の下部における映像の変動を分析し、前記変動が大きい場合は前記検出対象範囲に対して前記第一形態の人物が検出されていると判定する判定部130と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
赤外線カメラによって撮影された映像を取得する映像取得部と、
取得した前記映像に対して、人物の第一形態の映像を学習させた第一形態検出モデルおよび人物の第二形態の映像を学習させた第二形態検出モデルを用いて、前記第一形態の人物または前記第二形態の人物を検出する物体検出部と、
取得した前記映像における前記第一形態および前記第二形態の検出結果に基づき、前記第一形態検出モデルによる検出スコアが第一閾値以上であり、かつ前記第二形態検出モデルによる検出スコアが前記第一閾値より高い値である第二閾値以上である検出対象範囲に対して、前記検出対象範囲の所定部分における映像の変動を分析し、前記変動が大きい場合は、前記検出対象範囲に対して前記第一形態の人物が検出されていると判定する判定部と、
を備える、物体検出装置。
続きを表示(約 1,500 文字)
【請求項2】
前記第一形態はサイクリストであり、前記第一形態検出モデルはサイクリスト検出モデルであり、
前記第二形態は歩行者であり、前記第二形態検出モデルは歩行者検出モデルであり、
前記判定部は、前記検出対象範囲の下部における映像の変動を分析し、前記変動が大きい場合は、前記検出対象範囲に対してサイクリストが検出されていると判定する、
請求項1に記載の物体検出装置。
【請求項3】
前記第一形態はサイクリストであり、前記第一形態検出モデルはサイクリスト検出モデルであり、
前記第二形態はライダーであり、前記第二形態検出モデルはライダー検出モデルであり、
前記判定部は、前記検出対象範囲の下部における映像の変動を分析し、前記変動が大きい場合は、前記検出対象範囲に対してサイクリストが検出されていると判定する、
請求項1に記載の物体検出装置。
【請求項4】
前記判定部は、前記検出対象範囲の下部における映像の変動を分析し、前記検出対象範囲の下部における変動が左右交互に発生している場合は、前記検出対象範囲に対してサイクリストが検出されていると判定する、
請求項2または3に記載の物体検出装置。
【請求項5】
前記判定部は、前記検出対象範囲の下部における映像の下端位置の上下方向における変動を分析し、前記下端位置の変動が前記検出対象範囲の下部において左右交互に発生している場合は、前記検出対象範囲に対してサイクリストが検出されていると判定する、
請求項4に記載の物体検出装置。
【請求項6】
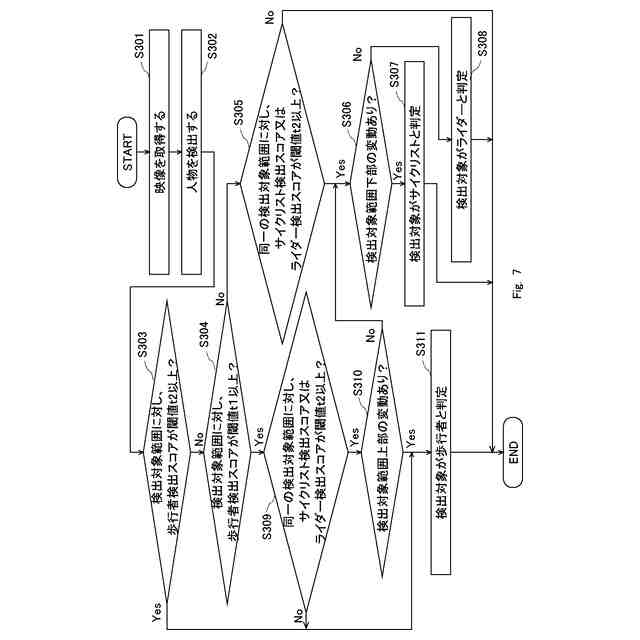
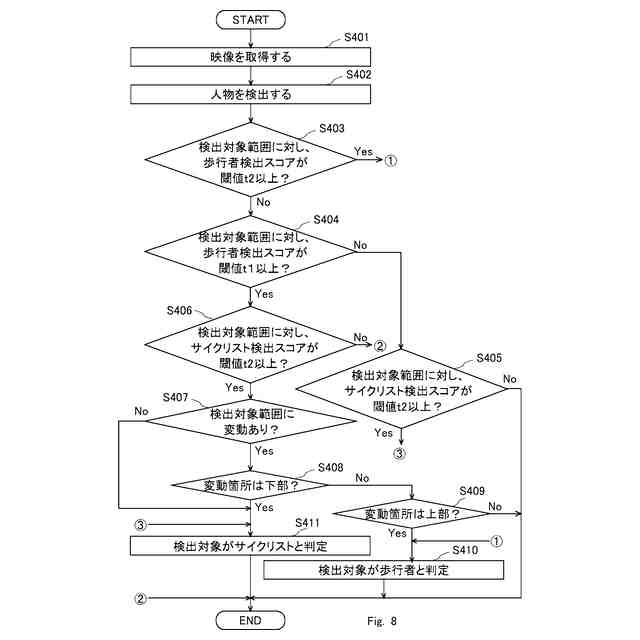
前記第一形態は歩行者であり、前記第一形態検出モデルは歩行者検出モデルであり、
前記第二形態はサイクリストまたはライダーであり、前記第二形態検出モデルはサイクリスト検出モデルまたはライダー検出モデルであり、
前記判定部は、前記検出対象範囲の上部における映像の変動を分析し、前記変動が大きい場合は、前記検出対象範囲に対して歩行者が検出されていると判定する、
請求項1に記載の物体検出装置。
【請求項7】
前記判定部は、前記検出対象範囲に対してサイクリストまたはライダーが検出されていると判定した前記検出対象範囲の下部における映像の変動を分析し、前記検出対象範囲の下部における映像の変動が大きい場合は、前記検出対象範囲に対してサイクリストが検出されていると判定する、
請求項6に記載の物体検出装置。
【請求項8】
前記判定部は、前記検出対象範囲に対してサイクリストまたはライダーが検出されていると判定した前記検出対象範囲の下部における左右の高さの違いを分析し、前記検出対象範囲の下部における左右の高さの違いがある場合は、前記検出対象範囲に対してサイクリストが検出されていると判定する、
請求項6に記載の物体検出装置。
【請求項9】
前記判定部は、前記検出対象範囲に対してサイクリストまたはライダーが検出されていると判定した前記検出対象範囲の下部における熱源の有無を分析し、前記検出対象範囲の下部において熱源が検出されている場合は、前記検出対象範囲に対してライダーが検出されていると判定する、
請求項6に記載の物体検出装置。
【請求項10】
前記映像取得部は、熱分布を輝度値で示す映像を取得し、
前記判定部は、前記検出対象範囲の所定部分における輝度値の変動を分析する、
請求項1に記載の物体検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体検出装置及び物体検出方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、赤外線カメラを用いて撮影された映像から歩行者及び自転車やオートバイなどに乗車している人物すなわちサイクリストやライダー等の人物を検出する情報処理システムの車両及びスマートポール等への実装が進められている。スマートポールにおいては、歩行者、人物が乗車している自転車、人物が乗車しているオートバイなどを区別して検出することが求められる。
映像から人物を検出する際には、歩行者とサイクリストとライダーとを判別可能であることが望ましい場合がある。例えば特許文献1には、検出した人物の下部に対する車輪の検出有無によって、検出した人物が歩行者であるかサイクリストであるかを判断する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2017/158983号
【発明の概要】
【発明が解決しようとする課題】
【0004】
人物がカメラからみて横方向に進行している場合、車輪を容易に検出可能であるため、当該人物が歩行者であるかサイクリストまたはライダーであるかを認識しやすい。一方、人物がカメラに向かう方向又はカメラから離れる方向に進行している場合、車輪を検出することが難しいことがあり、当該人物が歩行者であるかサイクリストまたはライダーであるかを適切に認識するために改善の余地があった。また、サイクリストとライダーとを適切に認識することも求められていた。
【0005】
本開示は、このような問題点に鑑みなされたものであり、歩行者、自転車やオートバイなどに乗車した人物を適切に認識可能である物体検出装置及び物体検出方法を提供する。
【課題を解決するための手段】
【0006】
本開示に係る物体検出装置は、
赤外線カメラによって撮影された映像を取得する映像取得部と、
取得した前記映像に対して、人物の第一形態の映像を学習させた第一形態検出モデルおよび人物の第二形態の映像を学習させた第二形態検出モデルを用いて、前記第一形態の人物または前記第二形態の人物を検出する物体検出部と、
取得した前記映像における前記第一形態および前記第二形態の検出結果に基づき、前記第一形態検出モデルによる検出スコアが第一閾値以上であり、かつ前記第二形態検出モデルによる検出スコアが前記第一閾値より高い値である第二閾値以上である検出対象範囲に対して、前記検出対象範囲の所定部分における映像の変動を分析し、前記変動が大きい場合は、前記検出対象範囲に対して前記第一形態の人物が検出されていると判定する判定部と、
を備える。
【0007】
本開示に係る物体検出方法は、
赤外線カメラによって撮影された映像を取得するステップと、
取得した前記映像に対して、人物の第一形態の映像を学習させた第一形態検出モデルおよび人物の第二形態の映像を学習させた第二形態検出モデルを用いて、前記第一形態の人物または前記第二形態の人物を検出するステップと、
前記第一形態の人物または前記第二形態の人物の検出結果に基づき、前記第一形態検出モデルによる検出スコアが第一閾値以上であり、かつ前記第二形態検出モデルによる検出スコアが前記第一閾値より高い値である第二閾値以上である検出対象範囲に対して、前記検出対象範囲の所定部分における映像の変動を分析し、前記変動が大きい場合は、前記検出対象範囲に対して前記第一形態の人物が検出されていると判定するステップと、
を物体検出装置が実行する。
【発明の効果】
【0008】
本開示によれば、歩行者、自転車やオートバイなどに乗車した人物を適切に認識可能である物体検出装置及び物体検出方法を提供することができる。
【図面の簡単な説明】
【0009】
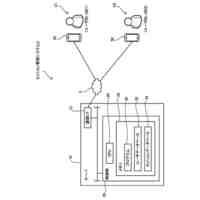
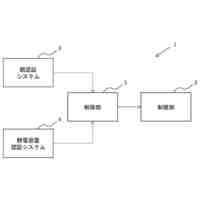
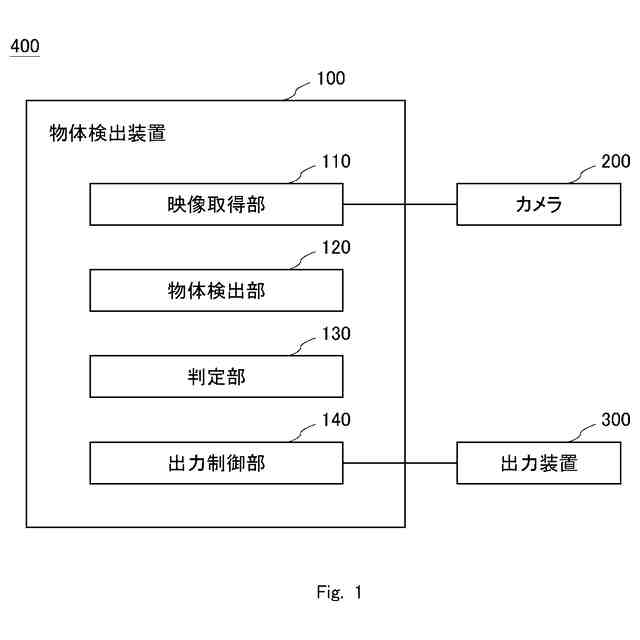
本開示に係る物体検出システムの構成を示すブロック図である。
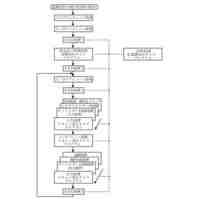
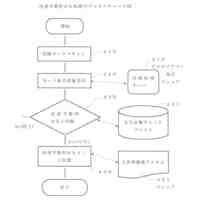
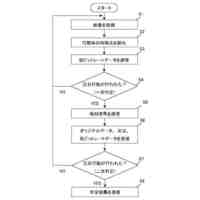
本開示に係る物体検出方法の流れを示すフローチャートである。
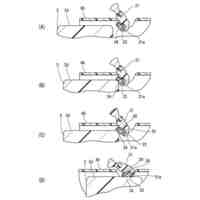
人物が検出された映像の一例である。
輝度値の変動を分析する場合の一例である。
最下端位置の変動を分析する場合の一例である。
本開示に係る物体検出方法の流れを示すフローチャートである。
本開示に係る物体検出方法の流れを示すフローチャートである。
本開示に係る物体検出方法の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
<実施形態1>
まず、図1を参照して本開示に係る物体検出装置100及び物体検出装置100を備える物体検出システム400の構成を説明する。物体検出システム400は、赤外線カメラを用いて撮影された映像から人物等を検出する情報処理システムである。図1に示すように、物体検出システム400は、物体検出装置100、カメラ200、及び出力装置300を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
4日前
個人
物品給付年金
1か月前
個人
情報処理装置
4日前
個人
政治のAI化
27日前
個人
RFタグ読取装置
1か月前
個人
在宅介護システム
1か月前
個人
人物再現システム
2か月前
個人
情報処理装置
今日
個人
プラグインホームページ
18日前
個人
AI飲食最適化プラグイン
1か月前
個人
情報入力装置
4日前
個人
物価スライド機能付生命保険
4日前
キヤノン株式会社
通信装置
1か月前
有限会社ノア
データ読取装置
2か月前
個人
マイホーム非電子入札システム
4日前
個人
電話管理システム及び管理方法
1か月前
個人
全アルゴリズム対応型プログラム
28日前
キヤノン株式会社
画像処理装置
25日前
株式会社CROSLAN
支援装置
1か月前
個人
日誌作成支援システム
2か月前
シャープ株式会社
電子機器
27日前
大同特殊鋼株式会社
輝線検出方法
27日前
サクサ株式会社
カードの制動構造
6日前
個人
決済手数料0%のクレジットカード
7日前
ミサワホーム株式会社
情報処理装置
1か月前
株式会社アジラ
データ転送システム
27日前
トヨタ自動車株式会社
情報処理装置
10日前
トヨタ自動車株式会社
欠け検査装置
27日前
個人
ポイント還元付き配送システム
2か月前
ミサワホーム株式会社
宅配ロッカー
24日前
ひびきの電子株式会社
認証システム
1か月前
パテントフレア株式会社
交差型バーコード
20日前
長屋印刷株式会社
画像形成システム
1か月前
村田機械株式会社
割当補助システム
10日前
Sansan株式会社
組織図生成装置
13日前
トヨタ自動車株式会社
管理装置
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ