TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085371
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199203
出願日
2023-11-24
発明の名称
3次元センサ制御装置、システム、方法、及びプログラム
出願人
日本電気通信システム株式会社
代理人
個人
,
個人
主分類
G01C
3/06 20060101AFI20250529BHJP(測定;試験)
要約
【課題】移動撮影によって点群データを取得して合成データを生成する際に、3次元センサのリアルタイム性を確保しつつ、合成データの点群密度を高めて均一化することに貢献することができる3次元センサ制御装置等を提供すること。
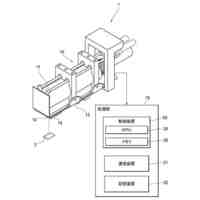
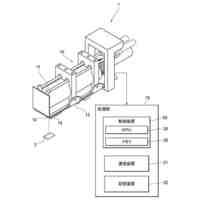
【解決手段】撮影者に付帯される3次元センサ制御装置であって、3次元センサを付帯した撮影者の動作状態を計測する動作計測部と、撮影者の位置を特定する位置特定部と、撮影者の動作状態及び位置の少なくとも一方に基づいて、3次元センサの挙動を制御する3次元センサ制御部と、を備え、3次元センサは、3次元センサ制御部によって挙動が制御された状態で撮影対象物を撮影して点群データを生成し、点群データは、合成データの生成に用いられる。
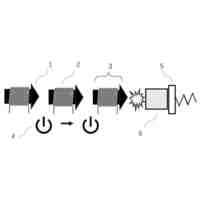
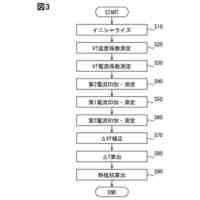
【選択図】図5
特許請求の範囲
【請求項1】
撮影者又は移動体に付帯された3次元センサ制御装置であって、
3次元センサを付帯した前記撮影者又は前記移動体の動作状態を計測するように構成された動作計測部と、
前記撮影者又は前記移動体の位置を特定するように構成された位置特定部と、
前記撮影者又は前記移動体の前記動作状態及び前記位置の少なくとも一方に基づいて、前記3次元センサの挙動を制御するように構成された3次元センサ制御部と、
を備え、
前記3次元センサは、前記3次元センサ制御部によって前記挙動が制御された状態で撮影対象物を撮影して点群データを生成し、
前記点群データは、合成データの生成に用いられる、
3次元センサ制御装置。
続きを表示(約 1,400 文字)
【請求項2】
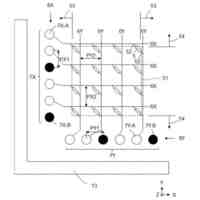
前記挙動の制御は、前記3次元センサが出力する前記点群データの点群数及びフレームレートの少なくとも一方の増減である、
請求項1記載の3次元センサ制御装置。
【請求項3】
前記挙動の制御は、前記3次元センサの電源のON/OFFである、
請求項1記載の3次元センサ制御装置。
【請求項4】
前記動作状態は、前記撮影者又は前記移動体の移動速度である、
請求項1記載の3次元センサ制御装置。
【請求項5】
前記3次元センサ制御部によって前記挙動が制御された状態の前記3次元センサからの前記点群データを取得するように構成された点群データ取得部と、
取得した前記点群データを、前記合成データを生成する合成データ生成装置に送信するように構成された点群データ送信部と、
を備える、
請求項1記載の3次元センサ制御装置。
【請求項6】
前記合成データ生成装置からの前記合成データを表示するように構成された合成データ表示部を備える、
請求項5記載の3次元センサ制御装置。
【請求項7】
前記合成データ表示部は、前記3次元センサ制御装置における表示装置を用いてWebブラウザ上で前記合成データを表示する、又は、前記3次元センサ制御装置に接続された眼鏡型表示装置において現実空間に合わせて前記合成データを表示するように構成されている、
請求項6記載の3次元センサ制御装置。
【請求項8】
請求項1乃至7のいずれか一に記載の3次元センサ制御装置と、
前記撮影者又は前記移動体に付帯されるとともに、前記3次元センサ制御装置によって前記挙動が制御された状態で前記撮影対象物を撮影して前記点群データを生成するように構成された前記3次元センサと、
前記点群データに基づいて前記合成データを生成する合成データ生成装置と、
を備える、3次元センサ制御システム。
【請求項9】
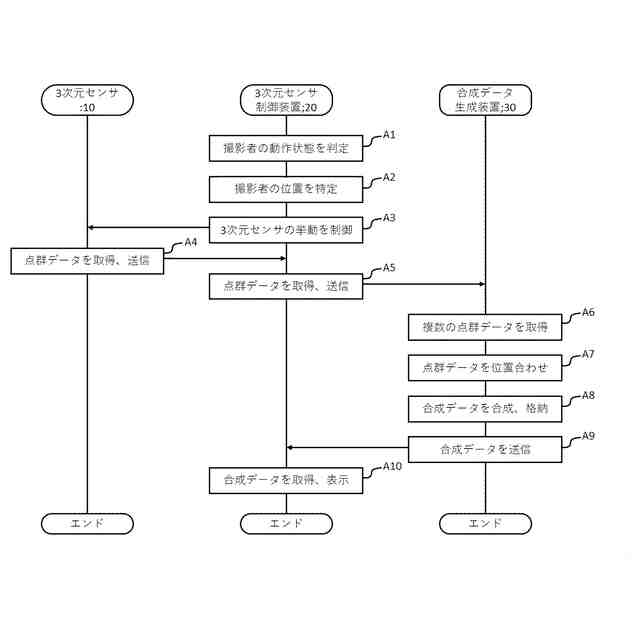
撮影者又は移動体に付帯された3次元センサ制御装置が、3次元センサを付帯した前記撮影者又は前記移動体の動作状態を計測するステップと、
前記3次元センサ制御装置が、前記撮影者又は前記移動体の位置を特定するステップと、
前記3次元センサ制御装置が、前記撮影者又は前記移動体の前記動作状態及び前記位置の少なくとも一方に基づいて、前記3次元センサの挙動を制御するステップと、
前記3次元センサが、前記挙動が制御された状態で撮影対象物を撮影して点群データを生成するステップと、
合成データ生成装置が、前記点群データに基づいて合成データを生成するステップと、
を含む、3次元センサ制御方法。
【請求項10】
撮影者又は移動体に付帯された3次元センサ制御装置に実行させるプログラムであって、
3次元センサを付帯した前記撮影者又は前記移動体の動作状態を計測する処理と、
前記撮影者又は前記移動体の位置を特定する処理と、
前記撮影者又は前記移動体の前記動作状態及び前記位置の少なくとも一方に基づいて、前記3次元センサの挙動を制御する処理と、
を前記3次元センサ制御装置に実行させ、
前記3次元センサは、前記挙動が制御された状態で撮影対象物を撮影して点群データを生成し、
前記点群データは、合成データの生成に用いられる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、3次元センサ制御装置、システム、方法、及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
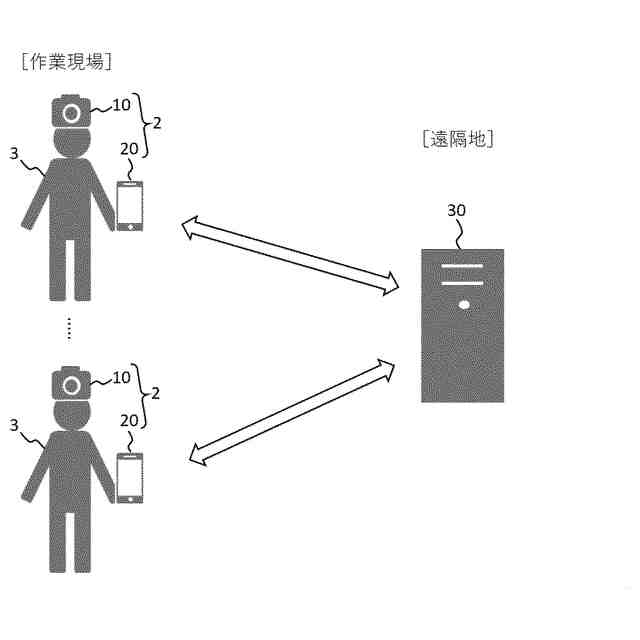
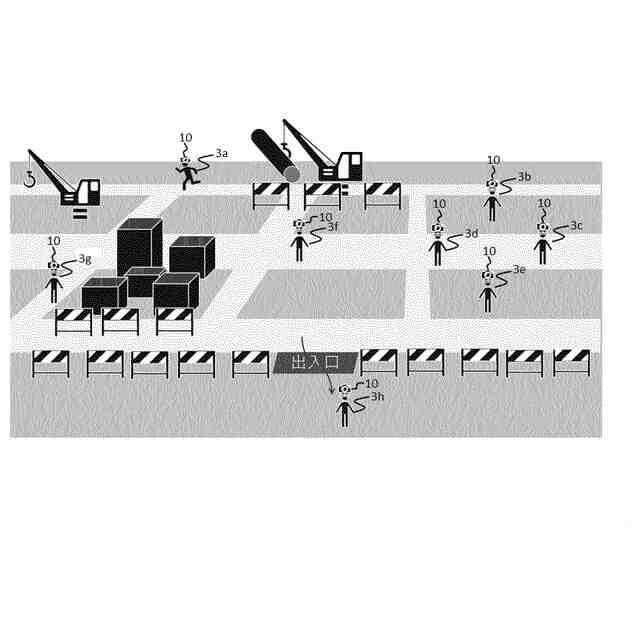
移動体(重機、車体、ドローンなど)や人(例えば、作業員)に3次元センサを付帯させて移動撮影を行い、それぞれの3次元センサで取得した複数の点群データ(3次元点群データ)を合成し、1つの巨大な合成マップ(3次元マップ)を作成する方法がある(特許文献1参照)。この方法によれば、状況変化の激しい場所において時々刻々と変化するエリアに柔軟に対応することができる。
【先行技術文献】
【特許文献】
【0003】
特開2023-022867号
【発明の概要】
【発明が解決しようとする課題】
【0004】
以下の分析は、本願発明者により与えられる。
【0005】
しかしながら、複数の3次元センサで移動撮影して取得した複数の点群データに基づいて3次元マップを作成するには、いくつかの問題がある。
【0006】
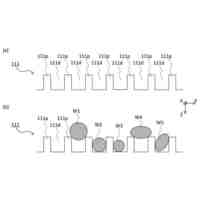
1つ目の問題として、移動撮影時における点群データのスパース(疎性、稀薄性)が挙げられる。これは、3次元センサが点群データを取得する過程において、取得する点群数とフレームレートがトレードオフの関係にあることに起因する。移動撮影によって点群データを取得する時、移動速度が高くなるに連れて3次元センサのリアルタイム性(即時性)が求められるため、取得する点群数を減少させる必要がある。移動速度が高い状態で撮影して取得した複数の点群データに基づいて作成した合成データは、全体的にスパースなデータとなり、データ分析において精度面で影響を及ぼす可能性がある。
【0007】
2つ目の問題として、作成した合成データについて、点群の密度の偏りないし不均衡が挙げられる。これは、複数の3次元センサによる移動撮影を行う過程において、移動速度の違いによって取得する点群密度が異なることや、巡回頻度によって点群密度が異なることに起因する。例えば、巡回頻度が高い場所は点群密度が高くなり、反対に、巡回頻度が低い場所の点群密度が低くなる。また、作業現場で作業を行う作業者に3次元センサを付帯させて、作業と同時に作業現場の点群データを取得するような場合、作業者が立ち止まって作業する場所は点群密度が高くなり、作業者が短時間で作業を終えて離れてしまう場所は点群密度が低くなる。このように、合成データの点群密度に偏りが生じている場合においても、データ分析において精度面で影響を及ぼす可能性がある。
【0008】
本発明の主な課題は、移動撮影によって点群データを取得して合成データを生成する際に、3次元センサのリアルタイム性を確保しつつ、合成データの点群密度を高めて均一化することに貢献することができる3次元センサ制御装置、システム、方法、及びプログラムを提供することである。
【課題を解決するための手段】
【0009】
第1の視点に係る3次元センサ制御装置は、撮影者又は移動体に付帯された3次元センサ制御装置であって、3次元センサを付帯した前記撮影者又は前記移動体の動作状態を計測するように構成された動作計測部と、前記撮影者又は前記移動体の位置を特定するように構成された位置特定部と、前記撮影者又は前記移動体の前記動作状態及び前記位置の少なくとも一方に基づいて、前記3次元センサの挙動を制御するように構成された3次元センサ制御部と、を備え、前記3次元センサは、前記3次元センサ制御部によって前記挙動が制御された状態で撮影対象物を撮影して点群データを生成し、前記点群データは、合成データの生成に用いられる。
【0010】
第2の視点に係る3次元センサ制御システムは、前記第1の視点に係る3次元センサ制御装置と、前記撮影者又は前記移動体に付帯されるとともに、前記3次元センサ制御装置によって前記挙動が制御された状態で前記撮影対象物を撮影して前記点群データを生成するように構成された前記3次元センサと、前記点群データに基づいて前記合成データを生成する合成データ生成装置と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
25日前
株式会社エビス
水準器
24日前
株式会社チノー
測定装置
6日前
個人
浸透探傷試験方法
20日前
日本碍子株式会社
ガスセンサ
24日前
株式会社不二越
塵埃噴射装置
19日前
トヨタ自動車株式会社
制御装置
20日前
株式会社東芝
センサ
19日前
日本特殊陶業株式会社
ガスセンサ
18日前
日本特殊陶業株式会社
ガスセンサ
19日前
日本精機株式会社
二酸化炭素濃度測定器
4日前
株式会社チノー
検量線の取得方法
6日前
株式会社不二越
X線測定装置
25日前
株式会社不二越
X線測定装置
25日前
学校法人 中央大学
管内径推定装置
10日前
個人
多段電磁加速による高力積衝撃試験機
12日前
TDK株式会社
アレイセンサ
20日前
東洋紡株式会社
ヘムタンパク質の安定化方法
13日前
TDK株式会社
計測装置
25日前
エスペック株式会社
温度槽及び試験方法
26日前
TDK株式会社
温度センサ
23日前
株式会社村田製作所
厚み測定装置
6日前
栗田工業株式会社
水処理システム
23日前
キヤノン株式会社
光学装置
3日前
本田技研工業株式会社
車載検出器
6日前
NISSHA株式会社
ガス検出器
2日前
スズキ株式会社
ECU交換診断システム
3日前
個人
簡易・迅速タンパク質検出装置および方法
20日前
トヨタ自動車株式会社
鋳巣の強度評価方法
10日前
株式会社 システムスクエア
検査選別装置
20日前
株式会社アイシン
電流センサ
3日前
ローム株式会社
加速度センサ
20日前
株式会社北斗測量設計社
測量用ポール座標軸設置台
6日前
株式会社デンソー
熱抵抗測定方法
13日前
株式会社荏原製作所
センサホルダ
16日前
レーザーテック株式会社
検査装置及び検査方法
6日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ