TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084676
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2024140646
出願日
2024-08-22
発明の名称
3Dモデリングに用いるコンピュータプログラム製品およびその移動体除去方法
出願人
台達電子工業股ふん有限公司
,
DELTA ELECTRONICS,INC.
代理人
弁理士法人コスモス国際特許商標事務所
主分類
G06T
17/00 20060101AFI20250527BHJP(計算;計数)
要約
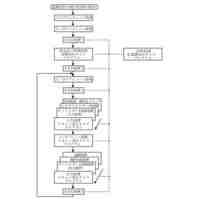
【課題】 3Dモデリングに用いるコンピュータプログラム製品およびその移動体除去方法を提供する。
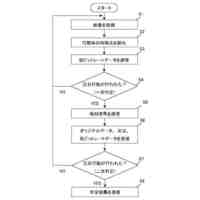
【解決手段】 特徴点検出プロセスにより、元画像シーケンス内の各元画像内の複数の特徴点を検出するステップ、領域分割プロセスにより、各元画像を複数の領域に分割するステップ、各元画像の前記領域からターゲット領域(target region)および1つ以上の非ターゲット領域を決定するステップ、前記元画像シーケンス内の連続する2つのフレームの元画像における前記これらの特徴点に基づいて、特徴点マッチングプロセスにより、前記連続する2つのフレームの元画像の各非ターゲット領域が移動領域であるかどうかを判定するステップ、および各元画像の前記非ターゲット領域内の前記移動領域と判定された領域を特徴のない領域に置き換えることにより、一連の静止画像を得るステップを含む3Dモデリングに用いる移動体除去方法。
【選択図】 図3
特許請求の範囲
【請求項1】
3Dモデリングに用いる移動体除去方法であって、
特徴点検出プロセスにより、元画像シーケンスにおける元画像のそれぞれについて、複数の特徴点を検出するステップと、
領域分割プロセスにより、前記元画像のそれぞれを複数の領域に分割するステップと、
前記元画像のそれぞれにおける前記複数の領域からターゲット領域(target region)および1つ以上の非ターゲット領域を特定するステップと、
前記元画像シーケンスの連続する2つのフレームの元画像における前記複数の特徴点に基づいて、特徴点マッチングプロセスにより、前記連続する2つのフレームの元画像の前記非ターゲット領域のそれぞれが移動領域であるかどうかを判定するステップと、
前記元画像のそれぞれの前記非ターゲット領域における前記移動領域と判定された領域を特徴なし領域に置き換えることにより、静止画像シーケンスを得るステップとを含む
移動体除去方法。
続きを表示(約 1,800 文字)
【請求項2】
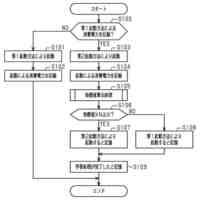
前記元画像シーケンスの連続する2つのフレームの元画像における前記複数の特徴点に基づいて、前記特徴点マッチングプロセスにより、前記連続する2つのフレームの元画像の前記非ターゲット領域のそれぞれが前記移動領域であるかどうかを判定するステップは、
前記連続する2つのフレームの元画像における前記複数の特徴点に基づいて、前記特徴点マッチングプロセスにより、前記特徴点に関する複数のマッチングペア(match pair)を得るステップと、
前記連続する2つのフレームの元画像における前記ターゲット領域内の前記複数のマッチングペアに基づいて、変換行列(transformation matrix)を推定するステップと、
前記連続する2つのフレームの元画像の非ターゲット領域のそれぞれについて、前記非ターゲット領域内の前記複数のマッチングペアおよび前記変換行列に基づいて、平均投影誤差を計算するステップと、
前記連続する2つのフレームの元画像の非ターゲット領域のそれぞれについて、前記平均投影誤差を閾値と比較することにより、前記非ターゲット領域のそれぞれが前記移動領域であるかどうかを判定するステップと、
を含む、
請求項1に記載の移動体除去方法。
【請求項3】
前記変換行列を推定するステップの前に、前記連続する2つのフレームの元画像における前記ターゲット領域内の前記複数のマッチングペアの数に基づいて、前記連続する2つのフレームの元画像における前記ターゲット領域のホモグラフィ(homography)関係を検査するステップと、
をさらに含む、
請求項2に記載の移動体除去方法。
【請求項4】
前記連続する2つのフレームの元画像の非ターゲット領域のそれぞれについて、前記非ターゲット領域内の前記複数のマッチングペアおよび前記変換行列に基づいて、前記平均投影誤差を計算するステップは、
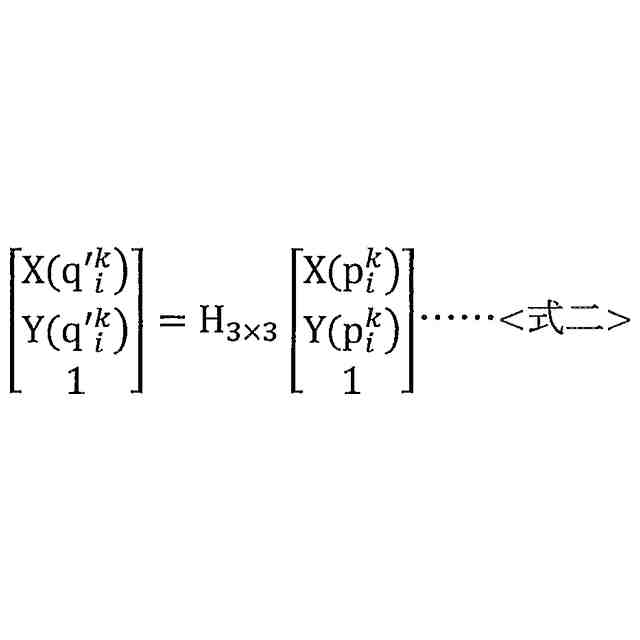
前記非ターゲット領域内のマッチングペアのそれぞれについて、前記変換行列を用いて前記マッチングペアにおける第1特徴点を投影点に投影し、前記投影点と前記マッチングペアにおける第2特徴点との間のユークリッド距離(Euclidean distance)を計算するステップと、
前記マッチングペアの前記ユークリッド距離の平均を前記平均投影誤差とするステップと、
を含む、
請求項2に記載の移動体除去方法。
【請求項5】
前記平均投影誤差を前記閾値と比較するステップの前に、
前記連続する2つのフレームの元画像の前記ターゲット領域の前記マッチングペアおよび前記変換行列に基づいて、前記ターゲット領域の前記平均投影誤差、および前記ターゲット領域に対応する標準偏差(standard deviation)を計算するステップと、
前記連続する2つのフレームの元画像の前記ターゲット領域の前記平均投影誤差および前記標準偏差に基づいて前記閾値を決定するステップと、
をさらに含む、
請求項2に記載の移動体除去方法。
【請求項6】
前記特徴点のそれぞれは、特徴記述子(feature descriptor)を有する、
請求項1に記載の移動体除去方法。
【請求項7】
前記特徴点マッチングプロセスは、前記連続する2つのフレームの元画像内の前記特徴記述子を比較して、前記特徴点に関する複数のマッチングペアを得るステップを含む、
請求項6に記載の移動体除去方法。
【請求項8】
前記特徴点検出プロセスは、スケール不変特徴変換(SIFT)アルゴリズムを用いるステップを含む、
請求項6に記載の移動体除去方法。
【請求項9】
前記領域分割プロセスは、ビジョントランスフォーマーアダプター (ViT-Adapter)を用いるステップを含む、
請求項1に記載の移動体除去方法。
【請求項10】
前記特徴点マッチングプロセスは、ブルートフォースマッチャー(BFMatcher)を用いるステップを含む、
請求項1に記載の移動体除去方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、3Dモデリング技術に関するものであり、特に、3Dモデリングに用いるコンピュータプログラム製品およびその移動体除去方法に関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
無人航空機(UAV)は、地形的な制約を克服して任務を遂行する能力を備えており、プロの人材が任務を遂行するのを補助し、効率を効果的に向上させることもできるため、近年市場全体が活況を呈している。建設/エンジニアリング/鉱業、エネルギー/運輸/公共施設、および精密農業などの分野で急速に発展していることが知られており、特に、無人航空機を用いて地形、風景、建物の3Dモデリングを行うことは、近年の主流のアプリケーションの1つとなっている。
【0003】
従来の無人航空機の3Dモデリングは、高解像度カメラを搭載した無人航空機を用いて、測定される静止体、或いは景色に対して異なる位置で異なる角度の連続撮影を行い、各画像上の特徴点を用いて無人航空機の3D座標を推定し、次いで測定される3D座標を逆推定し、3Dモデルを作成する。
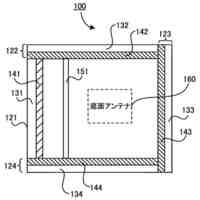
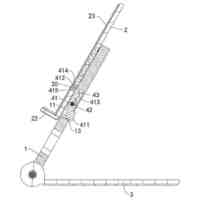
【0004】
図1は無人航空機を用いた3Dモデリング撮影の概略図である。図1に示すように、無人航空機は、空中の第1の位置100から飛行経路102に沿って第2の位置104まで飛行し、次いで飛行経路106に沿って第3の位置108まで飛行する。これらの3つの位置でターゲット体110に撮影を行い、モデリングに用いる第1の画像120、第2の画像130、および第3の画像140がそれぞれ得られる。ターゲット体110上の特徴点A112および特徴点B114は、複数の光線116によって、第1の画像120のa
1
点122およびb
1
点124、第2の画像130のa
2
点132およびb
2
点134、第3の画像140のa
3
点142およびb
3
点144にそれぞれ投影される。次いで、各画像の特徴的な類似度を計算し、多視点角度の光線を3D空間に逆投影することにより、特徴点A112および特徴点B114の3D座標を推定することができ、3D点群の型式で表すことができる。
【0005】
上述の3D座標の計算は、異なる角度で撮影された画像の共役点の投影が3D空間内の同一点で交差するという原理に基づいている。しかしながら、上述の撮影プロセスは一定時間持続する必要があるため(長さ30メートルの橋梁を例にすると、約10分の撮影が必要である)、撮影中に移動体(例えば、電車または高速鉄道)が通過した場合、異なるフレーム画像におけるこれらの移動体の光線投影は正確な位置で交差することができず、構築された3Dモデル内にノイズが含まれることになる。
【0006】
図2は、3Dモデリングのノイズの原因を示している。図2に示すように、無人航空機は、飛行経路202に沿って空中のある位置200から別の位置204まで飛行し、これら2つの位置で同一の物体に撮影を行い、モデリング用の第1の画像214と第2の画像224をそれぞれ取得する。この期間中、物体はA点210からA’点220まで移動する。無人航空機が移動する前に、A点210は、光線212を介して第1の画像214上のa点216に投影される。無人航空機が移動した前に、A’点220は、光線222を介して第2の画像224上のa’点226に投影される。上述の3Dモデリング原理に基づいて、a点216とa’点226の画像特性は類似しているため、これらを3D空間に逆投影すると、A*点230で交差することになる。しかしながら、A*点230の位置はA点210でもA’点220でもないため、ノイズが発生する。
【0007】
実際には、無人航空機の撮影では撮影シーンへの物体の出入りを制限することができないため、最終的な3Dモデルの精度を確保するには、3Dモデリング後に手動で1つずつノイズを除去する必要があるが、この除去プロセスは面倒で時間がかかる。現在、モデリング後に3Dモデルに対してノイズ除去処理を行う方法があるが、これは初期の3Dモデリングで得られた投影関係に依存しているため、ある状況においてはこのような方法は失敗する。例えば、入力画像に特殊な外観(サイズが大きすぎるなど)の移動体を有する場合、初期モデリングエラーが発生し、その後のモデルに対してノイズ除去処理が無効になる可能性がある。
【0008】
今後、無人航空機を用いたさまざまな3Dモデリングの需要が高まることが予想されるため、3Dモデリングに用いることができる移動体除去ソリューションの設計はますます重要な課題となっている。
【発明の概要】
【発明が解決しようとする課題】
【0009】
本開示の目的は、3Dモデリングに用いるコンピュータプログラム製品およびその移動体除去方法を提供することにある。
【課題を解決するための手段】
【0010】
本開示に係る移動体除去方法は、3Dモデリングに用いる移動体除去方法であって、特徴点検出プロセスにより、元画像シーケンスにおける元画像のそれぞれについて、複数の特徴点を検出するステップと、領域分割プロセスにより、元画像のそれぞれを複数の領域に分割するステップと、元画像のそれぞれにおける複数の領域からターゲット領域(target region)および1つ以上の非ターゲット領域を特定するステップと、元画像シーケンスの連続する2つのフレームの元画像における複数の特徴点に基づいて、特徴点マッチングプロセスにより、連続する2つのフレームの元画像の非ターゲット領域のそれぞれが移動領域であるかどうかを判定するステップと、元画像のそれぞれの非ターゲット領域における移動領域と判定された領域を特徴なし領域に置き換えることにより、静止画像シーケンスを得るステップとを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
物品給付年金
21日前
個人
政治のAI化
16日前
個人
非正規コート
1か月前
個人
在宅介護システム
1か月前
個人
人物再現システム
1か月前
個人
RFタグ読取装置
1か月前
個人
プラグインホームページ
7日前
個人
AI飲食最適化プラグイン
1か月前
キヤノン株式会社
通信装置
22日前
有限会社ノア
データ読取装置
1か月前
個人
電話管理システム及び管理方法
1か月前
個人
全アルゴリズム対応型プログラム
17日前
個人
広告提供システムおよびその方法
1か月前
株式会社ザメディア
出席管理システム
1か月前
キヤノン株式会社
画像処理装置
14日前
シャープ株式会社
電子機器
16日前
大同特殊鋼株式会社
輝線検出方法
16日前
個人
日誌作成支援システム
1か月前
株式会社CROSLAN
支援装置
1か月前
トヨタ自動車株式会社
欠け検査装置
16日前
ミサワホーム株式会社
情報処理装置
21日前
株式会社タクテック
商品取出集品システム
1か月前
長屋印刷株式会社
画像形成システム
1か月前
ひびきの電子株式会社
認証システム
1か月前
ミサワホーム株式会社
宅配ロッカー
13日前
トヨタ自動車株式会社
作業判定方法
1か月前
トヨタ自動車株式会社
工程計画装置
1か月前
個人
ポイント還元付き配送システム
1か月前
ミサワホーム株式会社
情報処理装置
1か月前
パテントフレア株式会社
交差型バーコード
9日前
株式会社アジラ
データ転送システム
16日前
オベック実業株式会社
接続構造
1か月前
トヨタ自動車株式会社
管理装置
13日前
Sansan株式会社
組織図生成装置
2日前
オベック実業株式会社
端末用スタンド
17日前
株式会社ユピテル
電子機器及びプログラム等
24日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ