TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083589
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2025044887,2021183665
出願日
2025-03-19,2021-11-10
発明の名称
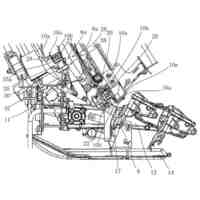
圃場作業機
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人あーく事務所
主分類
A01B
69/00 20060101AFI20250523BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】旋回開始後に、確実に自動直進を開始することが可能な圃場作業機を提供する。
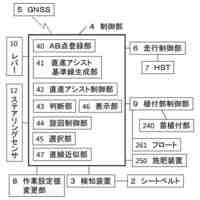
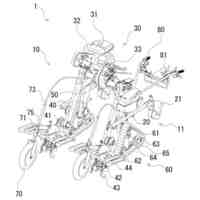
【解決手段】圃場作業機1は、走行部に支持された圃場作業部を含む。圃場作業機1は、圃場作業機1の位置情報を取得する位置情報取得部と、走行部の目標走行経路を設定する目標走行経路設定部と、取得した位置情報に基づいて目標走行経路に沿って走行部を操向させる自動操向制御を実行する自動操向制御部と、走行部が旋回動作することを検出する旋回検出部と、作業者が所定距離を任意に設定可能な所定距離設定部と、走行部の旋回動作と自動操向制御との連動の可否を判定する判定部と、を備え、走行部が旋回動作を開始した後、判定部の自動操向許可判定に基づいて自動操向制御を実行する。
【選択図】図8
特許請求の範囲
【請求項1】
走行部に支持された圃場作業部を含む圃場作業機であって、
前記圃場作業機は、前記圃場作業機の位置情報を取得する位置情報取得部と、
前記走行部の目標走行経路を設定する目標走行経路設定部と、
前記位置情報取得部が取得した位置情報に基づいて目標走行経路に沿って前記走行部を操向させる自動操向制御を実行する自動操向制御部と、
前記走行部が旋回動作することを検出する旋回検出部と、
作業者が所定距離を任意に設定可能な所定距離設定部と、
前記走行部の旋回動作と前記自動操向制御との連動の可否を判定する判定部と、を備え、
前記走行部が旋回動作を開始した後、前記判定部の自動操向許可判定に基づいて、前記自動操向制御部による、自動操向制御を実行する、圃場作業機。
続きを表示(約 300 文字)
【請求項2】
前記判定部は、機体の自動操向に対する条件に基づいて判定する、請求項1に記載の圃場作業機。
【請求項3】
前記判定部は、作業者が所定距離設定部によって任意に設定した所定距離を走行部が走行することに基づいて判定する、請求項1または2に記載の圃場作業機。
【請求項4】
前記判定部は、作業者が所定時間設定部によって任意に設定した所定時間を走行部が走行することに基づいて判定する、請求項1または2に記載の圃場作業機。
【請求項5】
前記自動操向制御を実行することを報知する報知手段を備える、請求項1~4のいずれか一つに記載の圃場作業機。
発明の詳細な説明
【技術分野】
【0001】
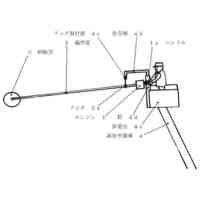
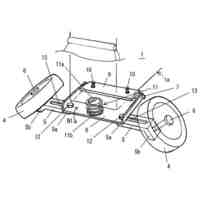
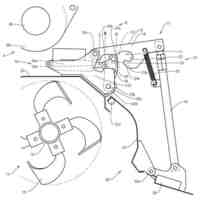
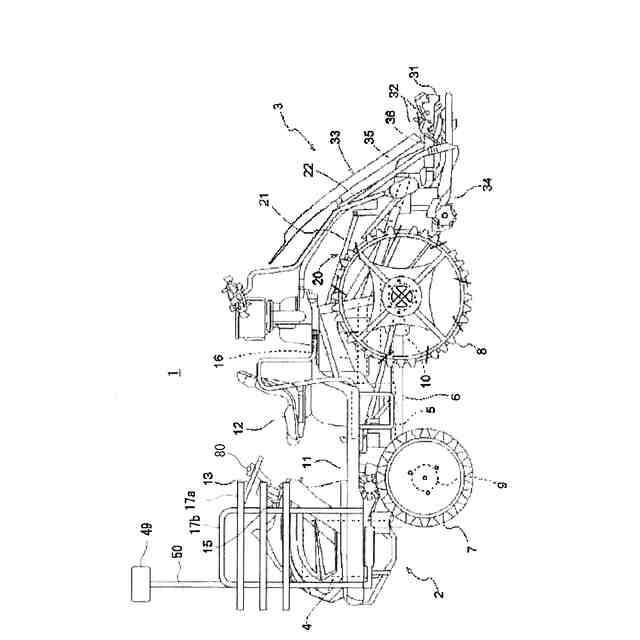
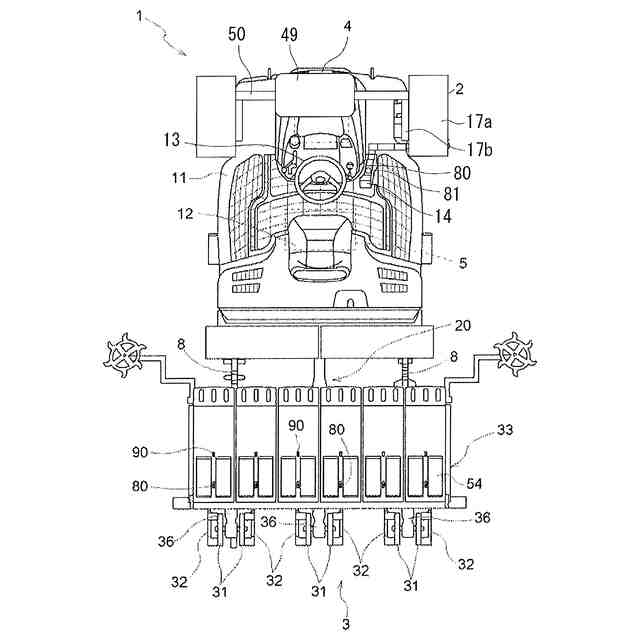
この発明は、走行しながら圃場へ苗を移植する圃場作業機に関し、特に、目標方位に沿って自律走行を行う圃場作業機に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来の、位置情報を取得し、設定した目標方位に沿って自動直進するよう制御する移植機が、特開2020-31558号公報(特許文献1)に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-31558号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
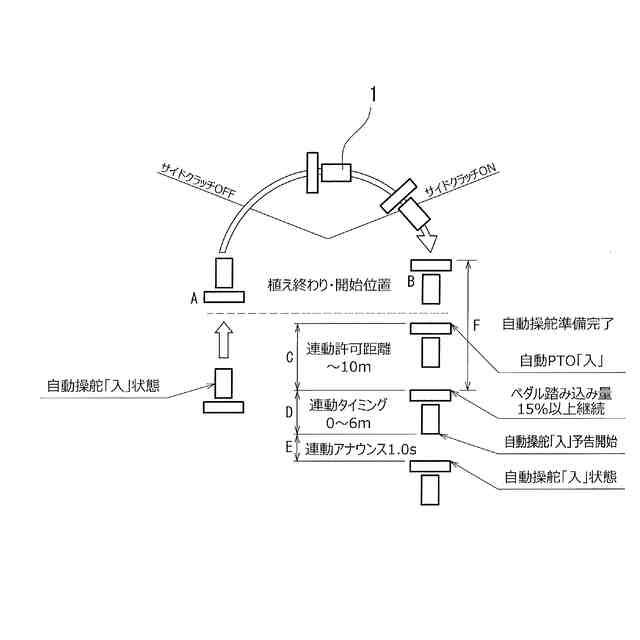
従来の、位置情報を取得し、設定した目標方位に沿って自動直進するよう制御する移植機は、上記のように構成されていた。しかしながら、旋回動作は作業者の運転の癖などによって左右されるため、旋回動作後の自動直進の開始に改良の余地があった。
【0005】
この発明は、上記のような問題点を解消するためになされたもので、旋回開始後に、確実に自動直進を開始することが可能な圃場作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る圃場作業機は、走行部に支持された圃場作業部を含む。圃場作業機は、圃場作業機の位置情報を取得する位置情報取得部と、走行部の目標走行経路を設定する目標走行経路設定部と、取得した位置情報に基づいて目標走行経路に沿って走行部を操向させる自動操向制御を実行する自動操向制御部と、走行部が旋回動作することを検出する旋回検出部と、作業者が所定距離を任意に設定可能な所定距離設定部と、走行部の旋回動作と自動操向制御との連動の可否を判定する判定部と、を備え、走行部が旋回動作を開始した後、判定部の自動操向許可判定に基づいて自動操向制御を実行する。
【0007】
この発明によれば、走行部が旋回動作を開始した後、判定部の自動操向許可判定に基づいて自動操向制御を実行する。
【0008】
その結果、旋回開始後に、任意の所定距離を走行部が走行するまでに作業者はハンドル等を操作して自動操向制御までに圃場作業機の条件を整えることが可能になるため、確実に自動直進を開始することが可能な圃場作業機を提供することができる。
【0009】
好ましくは、判定部は、機体の自動操向に対する条件(目標走行経路に対する機体の向きなど)に基づいて判定する。
【0010】
判定部は、作業者が所定距離設定部によって任意に設定した所定距離を走行部が走行することに基づいて判定してもよいし、作業者が所定時間設定部によって任意に設定した所定時間を走行部が走行することに基づいて判定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
枝切機
7日前
個人
苗キャップ
4日前
個人
飼槽
14日前
個人
園芸用自走車
8日前
個人
ペット用フード容器
13日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
育苗培地
19日前
株式会社アテックス
草刈機
今日
個人
水耕栽培システム
1日前
株式会社アピア
ルアー
12日前
個人
害虫捕獲装置
19日前
株式会社猫壱
首輪
1か月前
井関農機株式会社
収穫作業車両
18日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
1か月前
住友化学株式会社
植物病害防除方法
21日前
三菱マヒンドラ農機株式会社
移植機
18日前
株式会社ダイイチ
海苔網の酸処理船
1か月前
株式会社LIXIL
検知装置
15日前
ダイハツ工業株式会社
草刈り機
4日前
個人
ペット用歯磨き用具セット
6日前
平岡織染株式会社
防虫間仕切りシート
1か月前
松山株式会社
草刈作業機
1か月前
池田食研株式会社
腹足類の駆除忌避剤
1か月前
株式会社サタケ
穀物タンクの換気装置
1か月前
株式会社丹勝
TK防草植込式緑化工法
19日前
ニシム電子工業株式会社
散布装置
1か月前
株式会社シマノ
釣竿及び着脱部材
19日前
関東農機株式会社
ロータリ管理機
今日
合同会社小林知財研鑽処
液体空気散布船
1日前
井関農機株式会社
作業車両
19日前
株式会社ササキコーポレーション
農作業機
1か月前
株式会社ササキコーポレーション
農作業機
11日前
株式会社ササキコーポレーション
農作業機
11日前
株式会社ササキコーポレーション
農作業機
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ