TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083523
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2025041400,2023103627
出願日
2025-03-14,2023-06-23
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250523BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行を開始する際の作業性を向上させる作業車両を提供すること。
【解決手段】走行車体と、走行車体に取り付けられ、所定の作業位置、および、所定の非作業位置に昇降可能な作業機と、走行車体の位置を検出する位置測位装置と、検出された走行車体の位置に基づいて、基準線または基準方位に沿って走行車体を自動走行させる制御装置とを備え、自動走行または、作業者の操作によって走行する手動走行に切り替えるための走行切替部と自動走行であることを表示し、かつ、走行車体における走行方向のずれを表示可能な表示部とを備え、制御装置は、自動走行である場合、走行方向のずれを表示部に表示させず、手動走行である場合、走行方向のずれを表示部に表示させる。
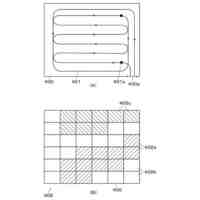
【選択図】図4
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体に取り付けられ、所定の作業位置、および、所定の非作業位置に昇降可能な作業機と、
前記走行車体の位置を検出する位置測位装置と、
検出された前記走行車体の位置に基づいて、基準線または基準方位に沿って前記走行車体を自動走行させる制御装置と
を備え、
前記自動走行または、作業者の操作によって走行する手動走行に切り替えるための走行切替部と、
前記自動走行であることを表示し、かつ、前記走行車体における走行方向のずれを表示可能な表示部と
を備え、
前記制御装置は、
前記自動走行である場合、前記走行方向のずれを前記表示部に表示させず、
前記手動走行である場合、前記走行方向のずれを前記表示部に表示させる、作業車両。
続きを表示(約 770 文字)
【請求項2】
前記制御装置は、
前記走行切替部により、前記自動走行を開始するための入操作が行われた場合に、前記作業機の昇降高さにかかわらず前記自動走行を作動状態にし、
前記自動走行を作動状態にした後に、前記作業機の高さが、前記所定の作業位置よりも高い所定高さ以上であることが検出された場合、前記自動走行を非作動状態にし、前記走行車体の走行速度の規定を、低速、および、高速に切り替えるための走行速度切替レバー
を備え、
前記制御装置は、
前記自動走行を開始するための入操作が行われた場合に、前記走行速度切替レバーの操作位置にかかわらず前記自動走行を作動状態にし、
前記自動走行を作動状態にした後に、前記走行速度切替レバーの操作位置が、高速に対応する位置であることが検出された場合、前記自動走行を非作動状態にする、請求項1に記載の作業車両。
【請求項3】
前記制御装置は、
前記位置測位装置によって、所定のサンプリング周波数によって取得された車速データを、所定時間分保持し、保持した前記車速データに所定のローパスフィルタを適用することで、前記走行車体の第1車速を算出し、
前記走行車体の目標車速を設定する変速レバーと、
前記走行車体に設けられ、前記走行車体の舵角を調整するステアリングと
を備え、
前記制御装置は、
前記走行車体の目標車速が所定車速以下である、前記ステアリングが所定の直進範囲ではない、前記作業機が非作業状態である、前記位置測位装置の受信レベルが未受信レベルである、前記第1車速がゼロである、の少なくともいずれか1つの条件を満たす場合、前記第1車速の算出条件を満たさないと判定する、請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、圃場において、自動走行させながら植え付けを行う作業車両が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6643091号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記技術では、自動走行を開始する場合に、苗植付部の高さについては、規制されておらず自動走行の開始時における作業性について改善の余地がある。
【0005】
本発明は、上記に鑑みてなされたものであって、自動走行を開始する際の作業性を向上させる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
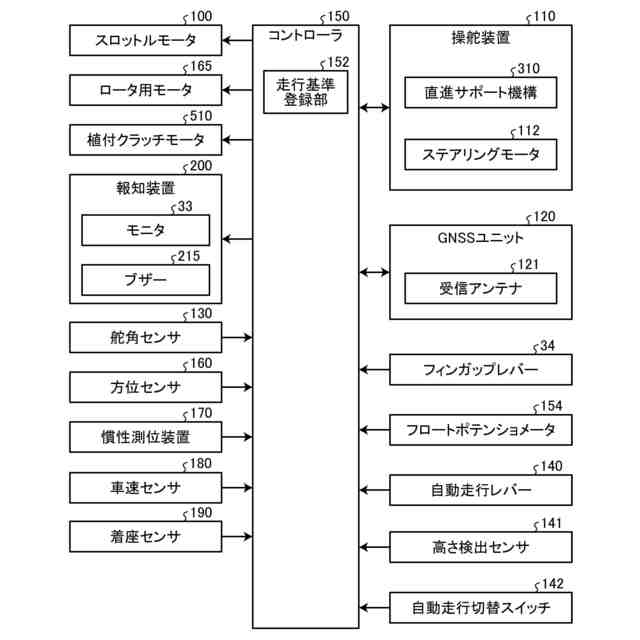
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両(1)は、走行車体(2)と、走行車体(2)に取り付けられ、所定の作業位置、および、所定の非作業位置に昇降可能な作業機(50)と、走行車体(2)の位置を検出する位置測位装置(150)と、検出された走行車体(2)の位置に基づいて、基準線または基準方位に沿って走行車体(2)を自動走行させる制御装置(150)とを備える。自動走行または、作業者の操作によって走行する手動走行に切り替えるための走行切替部と、自動走行であることを表示し、かつ、前記走行車体における走行方向のずれを表示可能な表示部と を備え、制御装置(150)は、自動走行である場合、走行方向のずれを表示部に表示させず、手動走行である場合、走行方向のずれを表示部に表示させる。
【発明の効果】
【0007】
実施形態の一態様によれば、作業車両は、自動走行を開始する際の作業性を向上させる。
【図面の簡単な説明】
【0008】
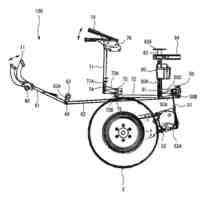
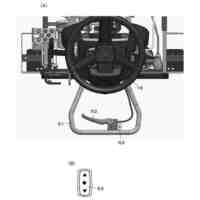
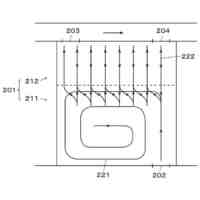
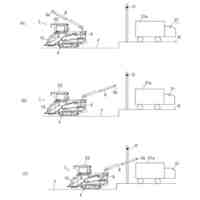
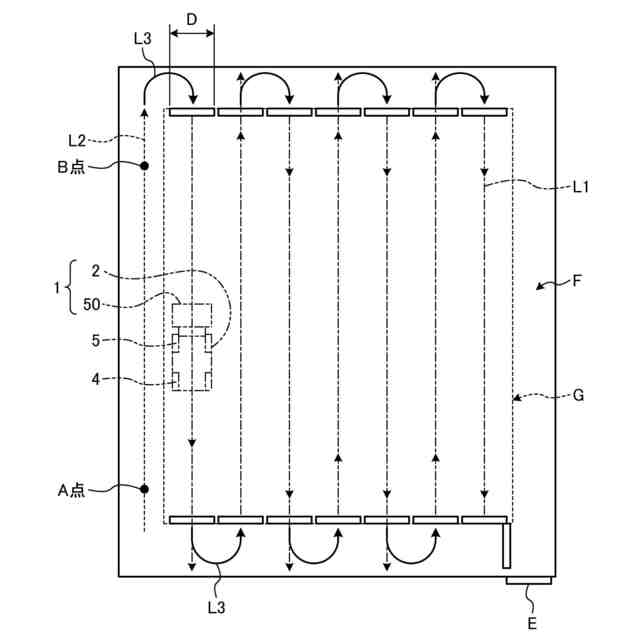
図1は、実施形態に係る苗移植機の直進サポートの概要を示す説明図である。
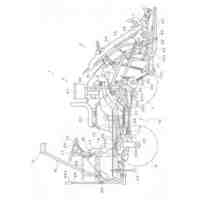
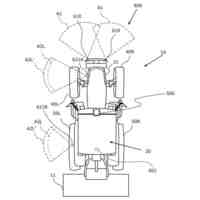
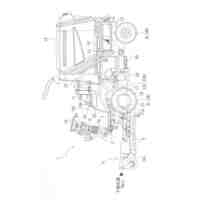
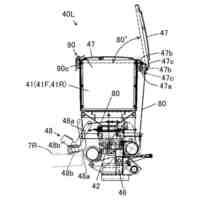
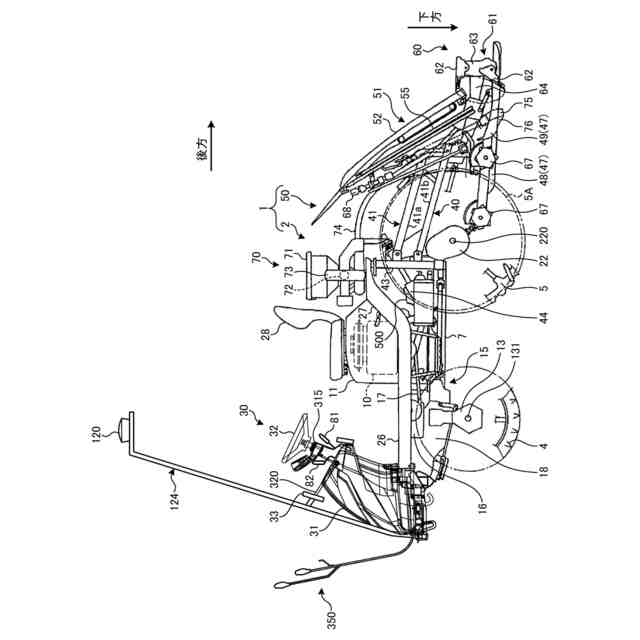
図2は、実施形態に係る苗移植機の側面図である。
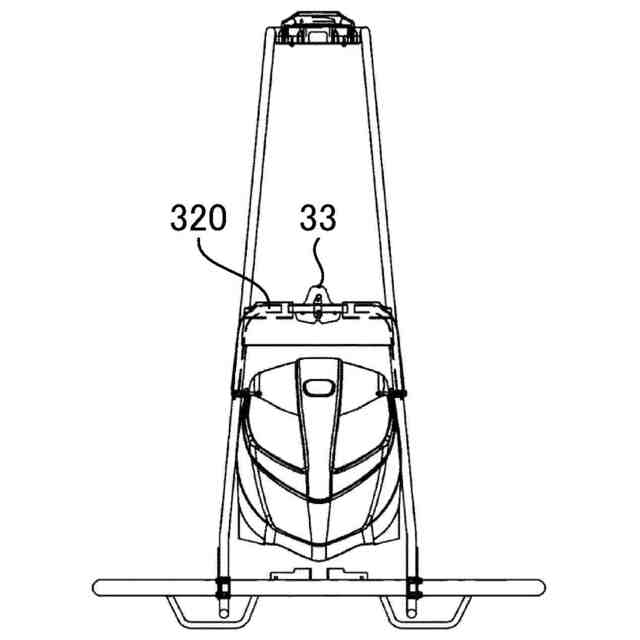
図3は、ステアリングポストを正面から見た概略図である。
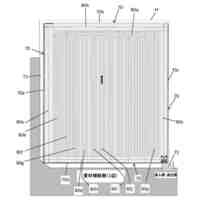
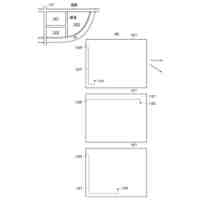
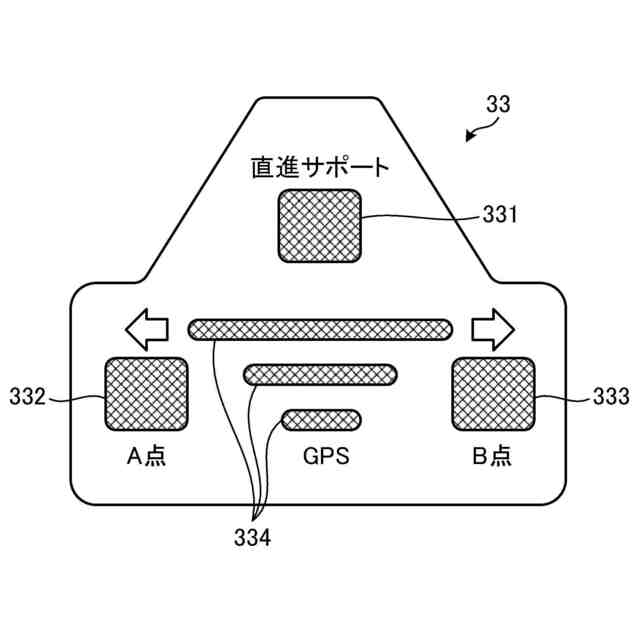
図4は、モニタの概略図である。
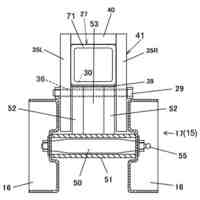
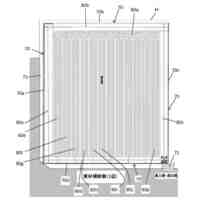
図5は、モニタ、および、フレームを正面から見た概略図である。
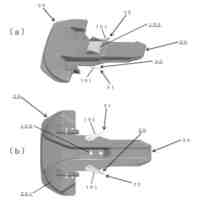
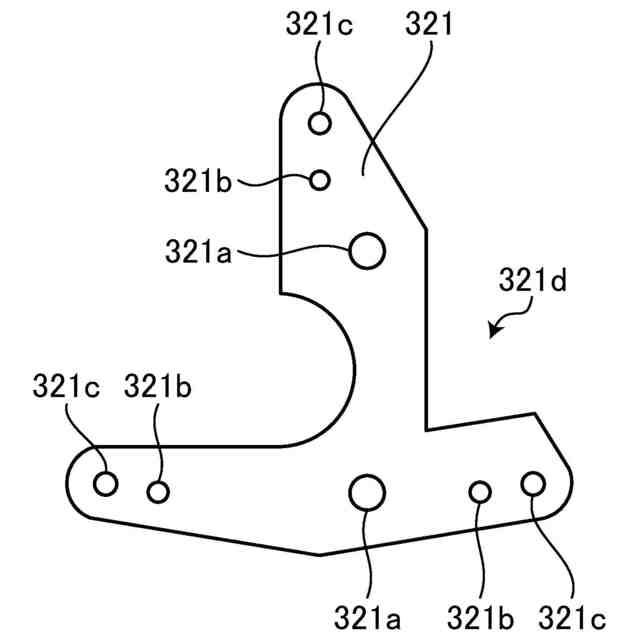
図6は、取付部材を、前方側から見た図である。
図7は、フレームに取り付けられたモニタの前方斜視図である。
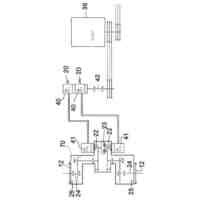
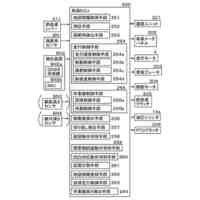
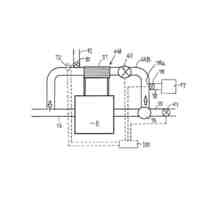
図8は、苗移植機のコントローラを中心とした機能ブロック図である。
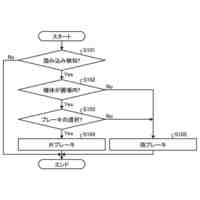
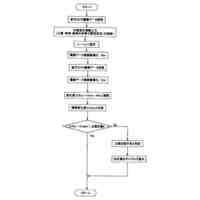
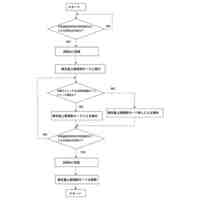
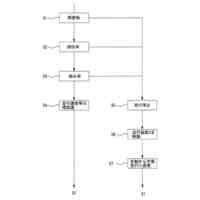
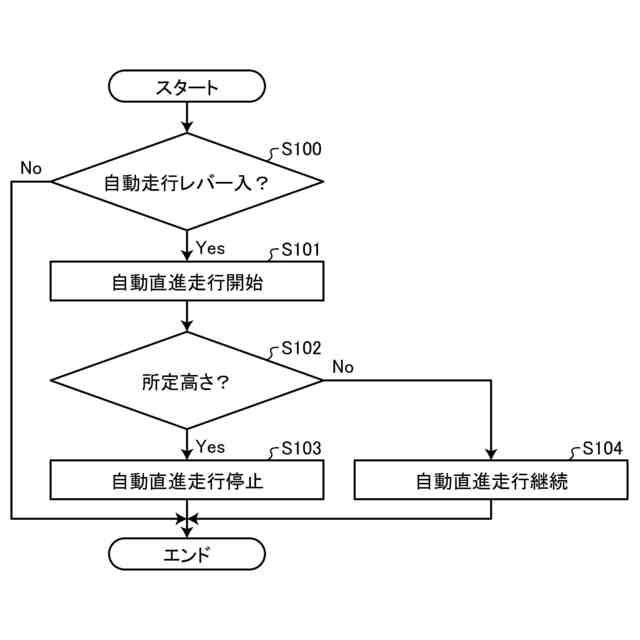
図9は、実施形態に係る自動直進走行の開始処理を説明するフローチャートである。
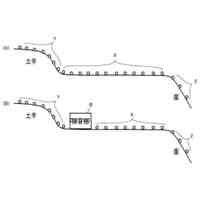
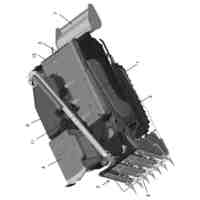
図10は、苗植付部の概略を示す側面図である。
図11は、苗植付部の概略を示す側面図である。
【発明を実施するための形態】
【0009】
以下に、本発明の実施形態に係る作業車両を、乗用型の苗移植機1として図面を参照しながら詳細に説明する。なお、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、あるいは実質的に同一のもの、いわゆる均等の範囲のものが含まれる。さらに、本発明は、上記実施形態に限定されるものではなく、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。また、以下では苗移植機1全体を指して機体と呼ぶ場合がある。
【0010】
図1は、実施形態に係る苗移植機1の直進サポート(自動直進)の概要を示す説明図である。本実施形態に係る苗移植機1は、後部に苗植付部50を連結するとともに、それぞれ左右一対の前輪4および後輪5を備える走行車体2を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
12日前
井関農機株式会社
作業車両
今日
井関農機株式会社
苗移植機
26日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
調製設備
6日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
苗移植機
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
27日前
井関農機株式会社
精米設備
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
収穫作業機
22日前
井関農機株式会社
コンバイン
20日前
井関農機株式会社
コンバイン
今日
井関農機株式会社
乗用草刈機
5日前
井関農機株式会社
EGR装置
22日前
井関農機株式会社
乗用草刈機
5日前
井関農機株式会社
圃場作業機
1日前
井関農機株式会社
施肥作業機
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ