TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083150
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196880
出願日
2023-11-20
発明の名称
計測装置、システム、方法、及び、プログラム
出願人
日本電気通信システム株式会社
代理人
個人
,
個人
主分類
G06T
7/70 20170101AFI20250523BHJP(計算;計数)
要約
【課題】点群データと現実空間との間にズレが生じている環境下でも、視認性を損なわずにピッキング精度を向上させることに貢献することができる計測システム等を提供すること。
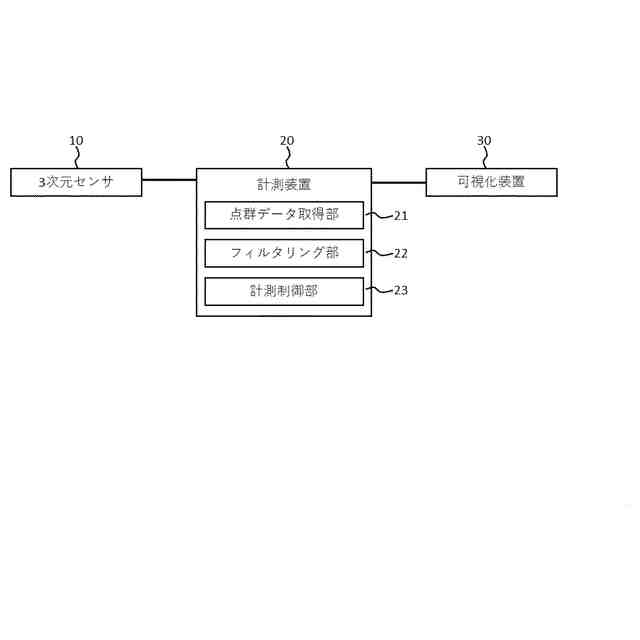
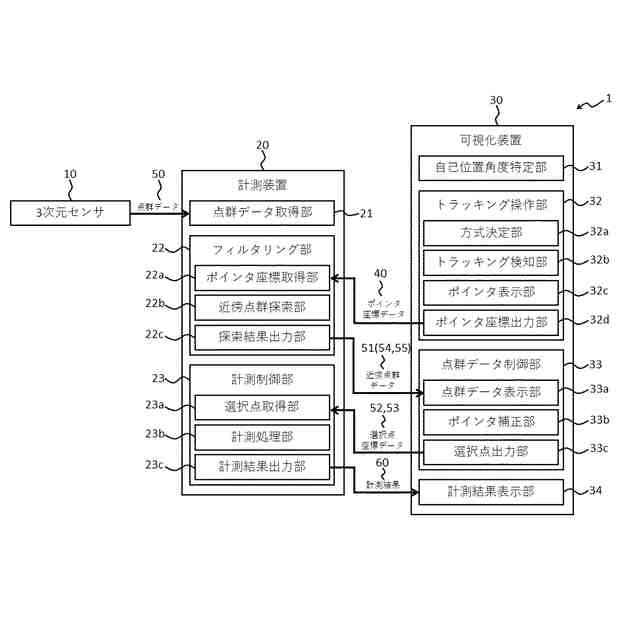
【解決手段】計測装置は、計測対象を3次元センサで撮影して得られた点群データを取得するように構成された点群データ取得部と、点群データの中から、ユーザが可視化装置で指定したポインタ座標データの近傍に存在する近傍点群データを抽出するように構成されたフィルタリング部と、近傍点群データの中の、ユーザが前記可視化装置で選択した選択点座標データに基づいて計測処理を行うように構成された計測制御部と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
計測対象を3次元センサで撮影して得られた点群データを取得するように構成された点群データ取得部と、
前記点群データの中から、ユーザが可視化装置で指定したポインタ座標データの近傍に存在する近傍点群データを抽出するように構成されたフィルタリング部と、
前記近傍点群データの中の、前記ユーザが前記可視化装置で選択した選択点座標データに基づいて計測処理を行うように構成された計測制御部と、
を備える、計測装置。
続きを表示(約 2,200 文字)
【請求項2】
前記フィルタリング部は、
前記可視化装置からの前記ポインタ座標データを取得するように構成されたポインタ座標取得部と、
前記点群データの中から、前記ポインタ座標データの近傍に存在する前記近傍点群データを探索して抽出するように構成された近傍点群探索部と、
前記近傍点群データを探索結果として前記可視化装置に向けて出力するように構成された探索結果出力部と、
を備える、
請求項1記載の計測装置。
【請求項3】
前記近傍点群探索部は、前記近傍点群データを抽出する際、前記点群データに含まれた前記3次元センサの設置位置及び設置角度に係るデータと、前記ポインタ座標データに含まれた前記可視化装置の位置及び角度に係るデータと、を用いて、前記点群データと前記ポインタ座標データとの位置合わせを行って、前記ポインタ座標データの近傍の前記近傍点群データを抽出するように構成されている、
請求項2記載の計測装置。
【請求項4】
前記近傍点群探索部は、
前記ポインタ座標データの最も近くに存在するオブジェクトに係る前記近傍点群データのみを抽出する、又は、
前記ポインタ座標データを中心に特定の距離以内に存在する1又は複数の前記近傍点群データのみを抽出する、若しくは、
前記ポインタ座標データの近傍に存在する特定のオブジェクトに係る前記近傍点群データのみを抽出する、
ように構成されている、
請求項2記載の計測装置。
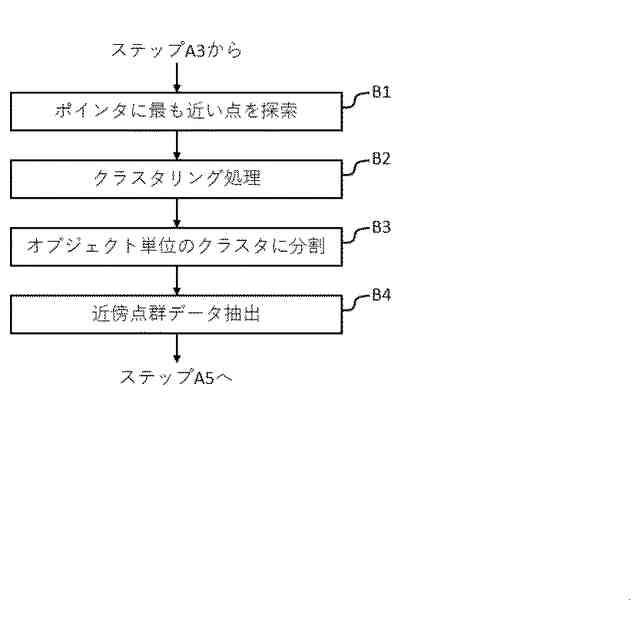
【請求項5】
前記近傍点群探索部は、前記特定のオブジェクトに係る前記近傍点群データのみを抽出する際、前記点群データに対してクラスタリングを行い、前記ポインタ座標データの最も近くに存在する前記特定のオブジェクトに該当するクラスタに係る前記近傍点群データのみを抽出するように構成されている、
請求項4記載の計測装置。
【請求項6】
前記計測制御部は、
前記可視化装置からの前記選択点座標データを取得するように構成された選択点取得部と、
前記選択点座標データに基づいて前記計測処理を行うように構成された計測処理部と、
前記計測処理によって得られた計測結果を前記可視化装置に向けて出力するように構成された計測結果出力部と、
を備える、
請求項1記載の計測装置。
【請求項7】
請求項1乃至6のいずれか一に記載の計測装置と、
前記計測対象を撮影して得られた前記点群データを前記計測装置に向けて出力するように構成された前記3次元センサと、
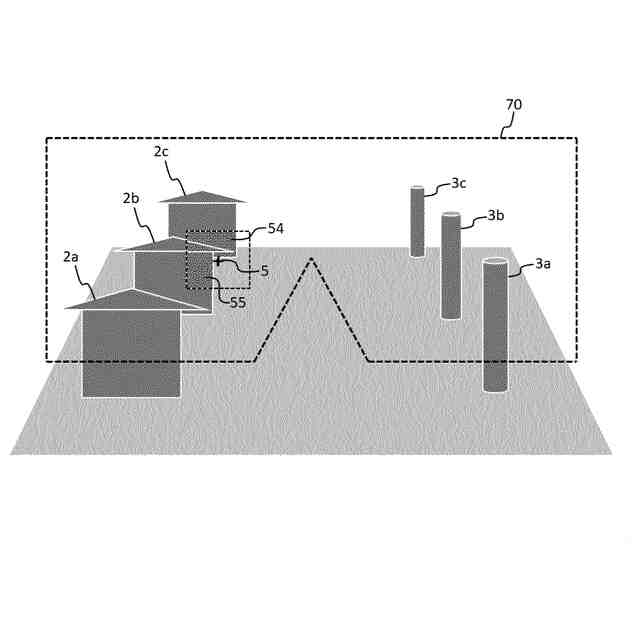
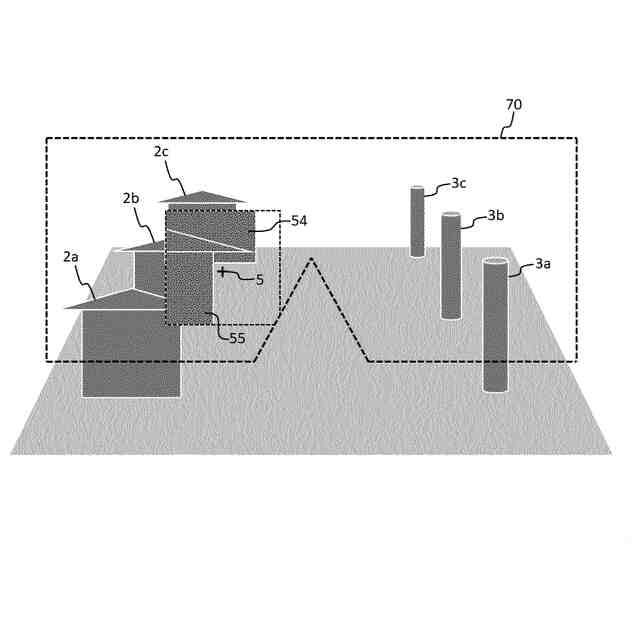
トラッキング操作により移動可能なポインタを視野に表示するとともに、前記視野から見える現実空間に合わせて前記近傍点群データを可視化し、前記トラッキング操作により前記近傍点群データの中から前記計測処理を行うための前記選択点座標データを選択し、前記計測処理によって得られた計測結果を可視化するように構成された前記可視化装置と、
を備える、計測システム。
【請求項8】
前記可視化装置は、
自己の位置及び角度を特定するように構成された自己位置角度特定部と、
前記トラッキング操作を検知して、前記ポインタの表示位置を移動させ、前記ポインタに係る前記ポインタ座標データを前記計測装置に向けて出力するように構成されたトラッキング操作部と、
前記計測装置からの前記近傍点群データを取得して、前記自己位置角度特定部で特定された前記自己の位置及び角度に係るデータ、及び、前記近傍点群データに含まれた前記3次元センサの設置位置及び設置角度に係るデータを用いて、前記視野において表示される前記近傍点群データの位置を制御するように構成された点群データ制御部と、
前記計測装置からの前記計測結果を取得して前記視野に表示するように構成された計測結果出力部と、
を備え、
前記トラッキング操作部は、前記トラッキング操作を検知して、前記近傍点群データの中の前記選択点座標データの選択を行うように構成され、
前記点群データ制御部は、前記選択点座標データを前記計測装置に向けて出力するように構成されている、
る、請求項7記載の計測システム。
【請求項9】
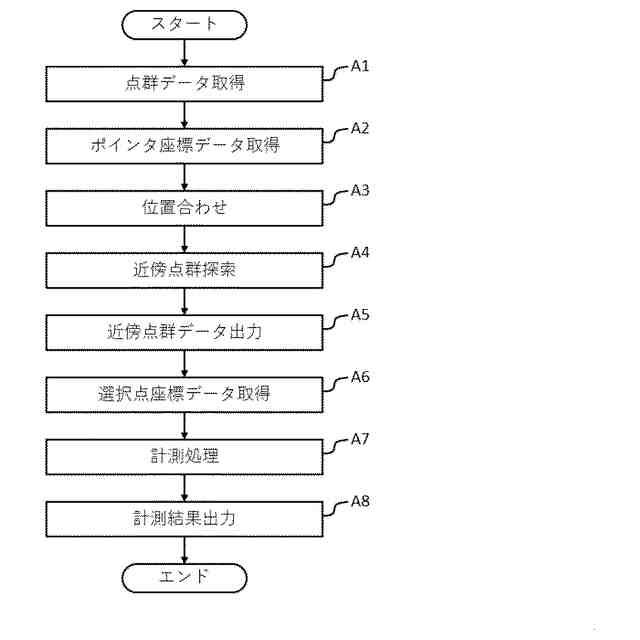
計測装置が、計測対象を3次元センサで撮影して得られた点群データを取得するステップと、
前記計測装置が、前記点群データの中から、ユーザが可視化装置で指定したポインタの近傍に存在する近傍点群データを抽出するステップと、
前記計測装置が、前記近傍点群データの中の、前記ユーザが前記可視化装置で選択した選択点座標データに基づいて計測処理を行うステップと、
を含む、計測方法。
【請求項10】
計測対象を3次元センサで撮影して得られた点群データを取得する処理と、
前記点群データの中から、ユーザが可視化装置で指定したポインタの近傍に存在する近傍点群データを抽出する処理と、
前記近傍点群データの中の、前記ユーザが前記可視化装置で選択した選択点座標データに基づいて計測処理を行う処理と、
を計測装置に実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測装置、システム、方法、及び、プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
AR(Augmented Reality)ヘッドセット、VR(Virtual Reality)ヘッドセット等の可視化デバイスを用いて物体の長さ、面積、または容積を計算する方法として、例えば、可視化デバイスの深さセンサを用いて可視化デバイスから物体までの距離を測定し、測定された距離に基づいて物体の3D(3 Dimensions)メッシュモデルを生成し、生成された3Dメッシュモデルを使用してユーザ入力により複数の点の空間座標を決定し、決定された複数の点の空間座標に基づいて、可視化デバイスによって長さ、面積、または容積を計算する方法がある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特表2017-536618号
【発明の概要】
【発明が解決しようとする課題】
【0004】
以下の分析は、本願発明者により与えられる。
【0005】
しかし、3Dメッシュモデルを現実空間に重畳させるには高精度な位置合わせの技術が求められるため、特許文献1の方法では、3Dメッシュモデルを精緻に現実空間へ重畳させるのは困難である。3Dメッシュモデルと現実空間との間にズレが生じている環境下では、3Dメッシュモデルと現実空間との対比が難しく、計算時の複数の点の空間座標の決定(ピッキング)の精度の悪化に繋がる。特に、ハンドトラッキング(例えば、ジェスチャー認識)、アイトラッキング(例えば、視線追跡)等を利用したユーザ入力によってピッキングを行う際、上記の3Dメッシュモデルの位置合わせの精度によるズレの影響に加えて、手の震えや視線の揺れ等によるピッキング精度の悪化の可能性がある。また、3Dメッシュモデルが現実空間とズレた位置で表示されることにより、視認性を損なう可能性がある。これらの可能性は、3Dメッシュモデルに限らず、3Dデータである点群データにも同じことが言える。
【0006】
本発明の主な課題は、点群データと現実空間との間にズレが生じている環境下でも、視認性を損なわずにピッキング精度を向上させることに貢献することができる計測装置、システム、方法、及び、プログラムを提供することである。
【課題を解決するための手段】
【0007】
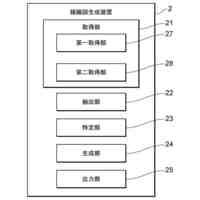
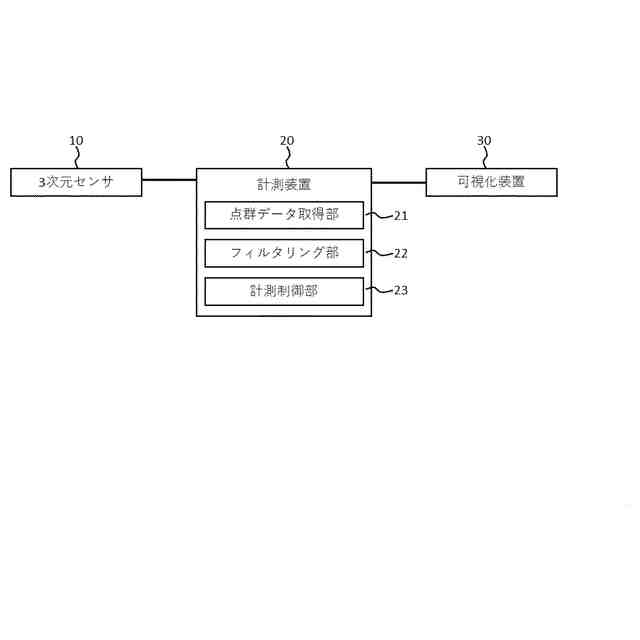
第1の視点に係る計測装置は、計測対象を3次元センサで撮影して得られた点群データを取得するように構成された点群データ取得部と、前記点群データの中から、ユーザが可視化装置で指定したポインタ座標データの近傍に存在する近傍点群データを抽出するように構成されたフィルタリング部と、前記近傍点群データの中の、前記ユーザが前記可視化装置で選択した選択点座標データに基づいて計測処理を行うように構成された計測制御部と、を備える。
【0008】
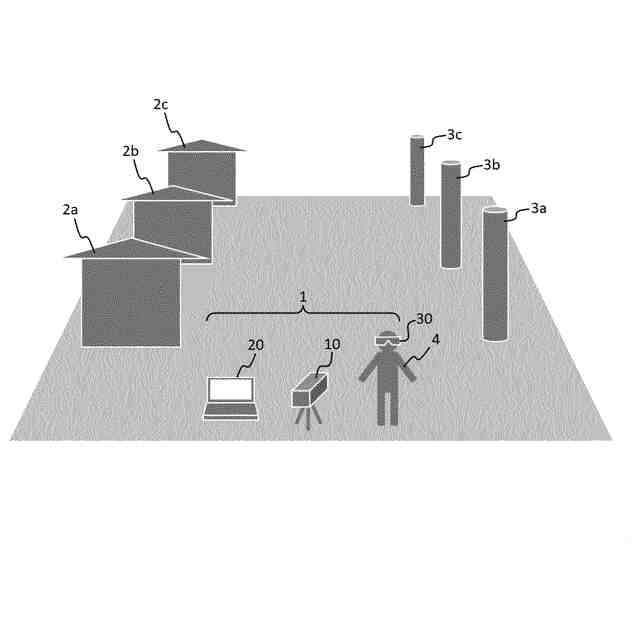
第2の視点に係る計測システムは、前記第1の視点に係る計測装置と、前記計測対象を撮影して得られた前記点群データを前記計測装置に向けて出力するように構成された前記3次元センサと、トラッキング操作により移動可能なポインタを視野に表示するとともに、前記視野から見える現実空間に合わせて前記近傍点群データを可視化し、前記トラッキング操作により前記近傍点群データの中から前記計測処理を行うための前記選択点座標データを選択し、前記計測処理によって得られた計測結果を可視化するように構成された前記可視化装置と、を備える。
【0009】
第3の視点に係る計測方法は、計測装置が、計測対象を3次元センサで撮影して得られた点群データを取得するステップと、前記計測装置が、前記点群データの中から、ユーザが可視化装置で指定したポインタの近傍に存在する近傍点群データを抽出するステップと、前記計測装置が、前記近傍点群データの中の、前記ユーザが前記可視化装置で選択した選択点座標データに基づいて計測処理を行うステップと、を含む。
【0010】
第4の視点に係るプログラムは、計測対象を3次元センサで撮影して得られた点群データを取得する処理と、前記点群データの中から、ユーザが可視化装置で指定したポインタの近傍に存在する近傍点群データを抽出する処理と、前記近傍点群データの中の、前記ユーザが前記可視化装置で選択した選択点座標データに基づいて計測処理を行う処理と、を計測装置に実行させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
政治のAI化
14日前
個人
非正規コート
1か月前
個人
物品給付年金
19日前
個人
人物再現システム
1か月前
個人
RFタグ読取装置
1か月前
個人
在宅介護システム
1か月前
個人
プラグインホームページ
5日前
個人
AI飲食最適化プラグイン
1か月前
キヤノン株式会社
通信装置
20日前
個人
電話管理システム及び管理方法
1か月前
有限会社ノア
データ読取装置
1か月前
キヤノン株式会社
画像処理装置
12日前
株式会社ザメディア
出席管理システム
1か月前
個人
広告提供システムおよびその方法
1か月前
個人
全アルゴリズム対応型プログラム
15日前
シャープ株式会社
電子機器
14日前
個人
日誌作成支援システム
1か月前
株式会社CROSLAN
支援装置
1か月前
大同特殊鋼株式会社
輝線検出方法
14日前
ひびきの電子株式会社
認証システム
1か月前
ミサワホーム株式会社
宅配ロッカー
11日前
ミサワホーム株式会社
情報処理装置
19日前
トヨタ自動車株式会社
欠け検査装置
14日前
株式会社アジラ
データ転送システム
14日前
ミサワホーム株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
工程計画装置
1か月前
パテントフレア株式会社
交差型バーコード
7日前
株式会社タクテック
商品取出集品システム
1か月前
長屋印刷株式会社
画像形成システム
1か月前
個人
ポイント還元付き配送システム
1か月前
トヨタ自動車株式会社
管理装置
11日前
Sansan株式会社
組織図生成装置
今日
応研株式会社
業務支援システム
5日前
オベック実業株式会社
接続構造
1か月前
株式会社ユピテル
電子機器及びプログラム等
22日前
オムロン株式会社
回転装置及びマウス
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ