TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078871
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2025039041,2023178291
出願日
2025-03-12,2020-10-19
発明の名称
農作業機及び農作業機を用いた作業方法
出願人
株式会社ササキコーポレーション
代理人
個人
,
個人
,
個人
主分類
A01B
35/04 20060101AFI20250513BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
耕耘後の砕土具合等の土の状態を機械的な判断によって行うことが可能な代掻き農作業機を提供する。
【解決手段】
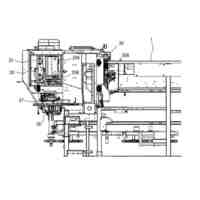
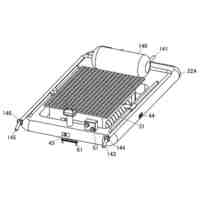
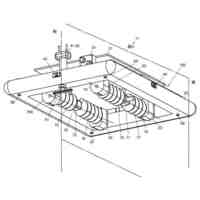
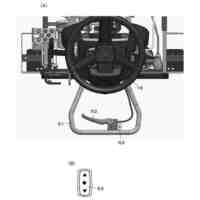
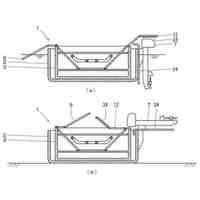
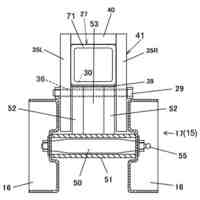
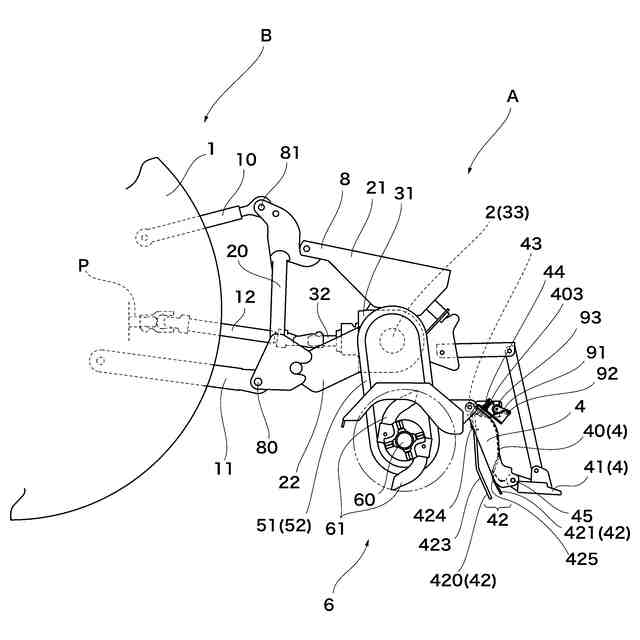
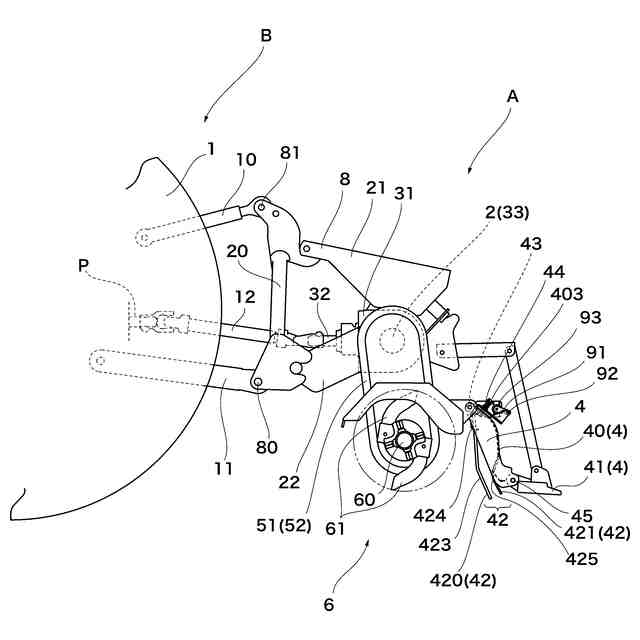
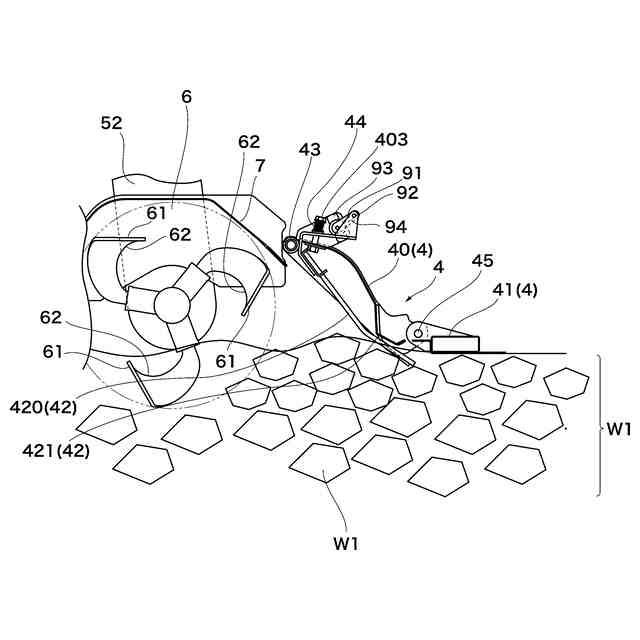
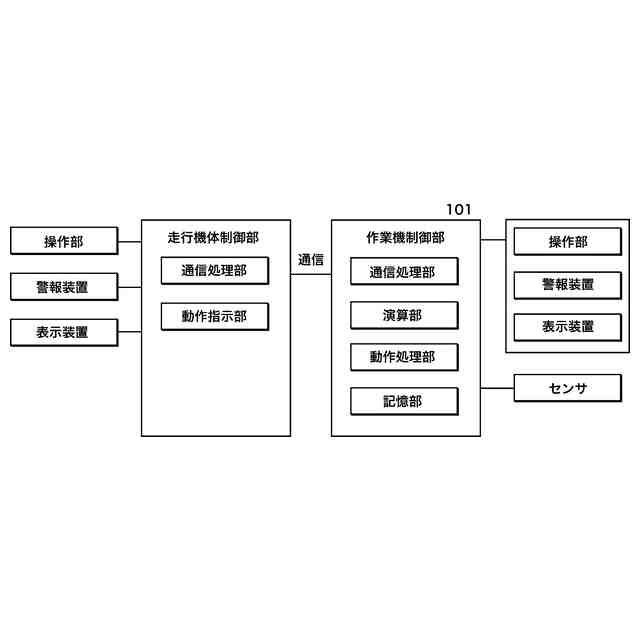
走行機体Bに連結する農作業機Aであって、農作業機Aは、回動可能に構成して泥土中の夾雑物を押し込んで埋め込むことが可能なレーキ体42と、レーキ体42の回動角度を検出するとともに検出信号を送信可能なセンサ93と、検出信号によってレーキ体42の回動角度を判定可能な制御部101と、を備え、制御部101はセンサ93からの検出信号によって、泥土中の土塊を検出可能である、ことを特徴とする農作業機A。
【選択図】図1
特許請求の範囲
【請求項1】
走行機体に連結する農作業機であって、
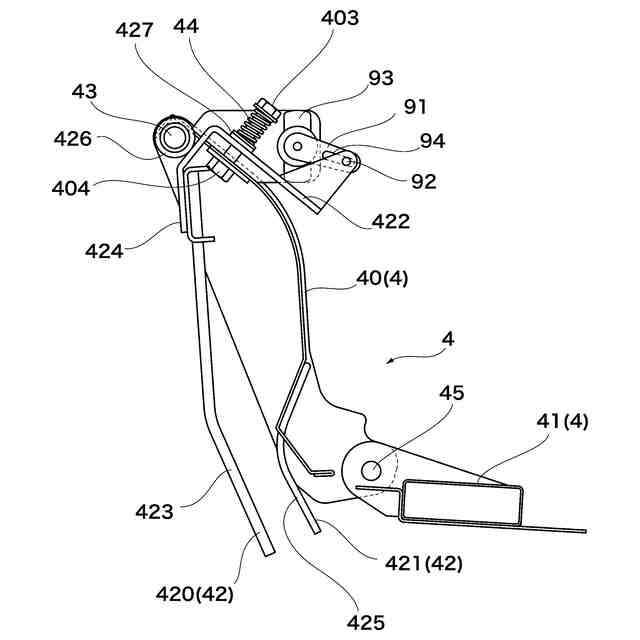
前記農作業機は、回動可能に構成して泥土中の夾雑物を押し込んで埋め込むことが可能なレーキ体と、
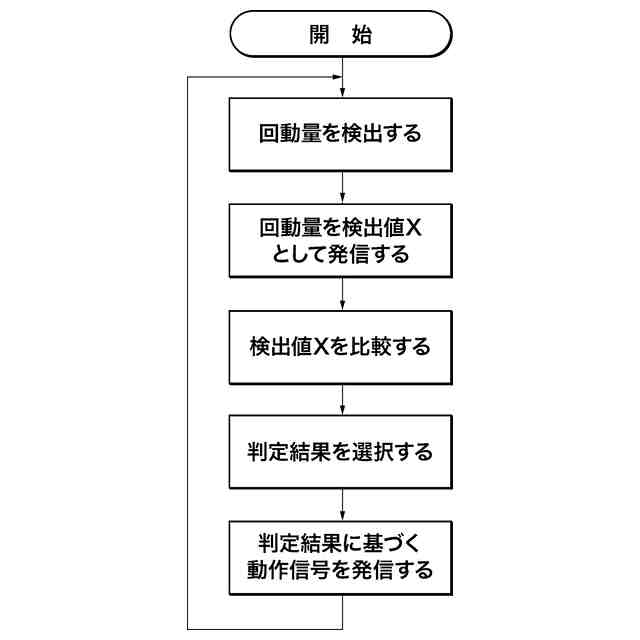
前記レーキ体の回動角度を検出するとともに検出信号を送信可能なセンサと、
前記検出信号によってレーキ体の回動角度を判定可能な制御部と、を備え
前記制御部は前記センサからの検出信号によって、泥土中の土塊を検出可能である、
ことを特徴とする農作業機。
続きを表示(約 450 文字)
【請求項2】
前記レーキ体は上下方向に回動可能な整地体に対して回動可能に設ける、
ことを特徴とする請求項1に記載の農作業機。
【請求項3】
前記レーキ体は前記整地体の前方部から後端側にかけて設ける、
ことを特徴とする請求項2に記載の農作業機。
【請求項4】
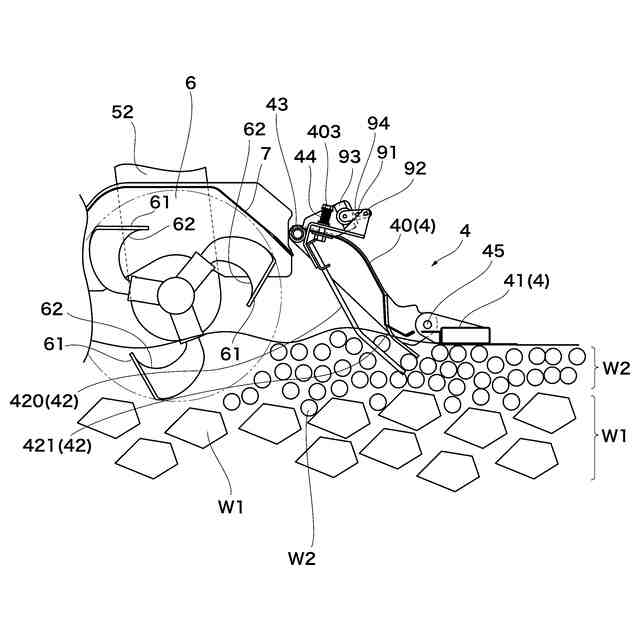
前記レーキ体の後方には、前記レーキ体を通過した土塊を土壌に鋤き込む押し込む第2のレーキ体と、
を備えることを特徴とする請求項1に記載の農作業機。
【請求項5】
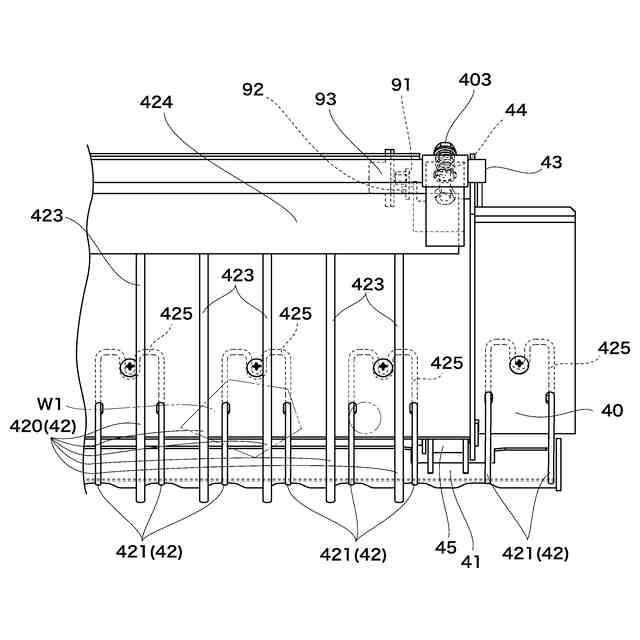
前記レーキ体は複数の棒状部材を備え、
前記レーキ体が土壌面に接したときの前記棒状部材の1本当たりの押圧力が一定である、
ことを特徴とする請求項1に記載の農作業機。
【請求項6】
前記制御部は前記検出信号を基にして、前記走行機体が実行すべき動作を実行させるための動作信号を前記走行機体に発信可能である、
ことを特徴とする請求項1乃至5のいずれかに記載の農作業機。
発明の詳細な説明
【技術分野】
【0001】
この発明は、農作業機及び農作業機を用いた作業方法、詳細には農作業機である代掻き作業機及び農作業機を用いた作業方法に係る。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
代掻き作業を行う装置として、例えば特許文献1「農作業機」によって、その機構が開示されている。特許文献1には、ロータリ作業部により耕耘された耕土を整地するエプロンと、このエプロンの回動角度を検出するポテンショメータにより検出されたエプロンの回動角度に応じた情報を送信可能で、この情報に応じた複数の異なる耕深を示す指標を表示する耕深表示装置を備えることを要旨とする農作業機が示されている。これによれば、泥水や泥が耕深表示部に付着せず、作業者が耕深を示す指標を確認できるとされている。
【0003】
また、特許文献2には、特許文献1とほぼ同様の作業機形態でありながらも、エプロンあるいはレベラの回動を検出し、この検出した結果を用いて圃場の状態を判定し、その判定結果をモニタに表示するものである。
【先行技術文献】
【特許文献】
【0004】
特開2017-23054号公報
特開2019-88204号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
代掻き作業は整地後の土壌の状態によって、作業者が耕耘深さや耕耘速度等の代掻き条件を決定し、作業を実行することが望ましい。とりわけ、耕耘整地後の土壌内の状態を、目視で瞬時に判断することは、熟練者でも容易ではない。
特許文献1のように、整地するエプロンと呼ばれる整地部の上下動を検知し、検知結果を表示装置に表示させれば、整地表面に対する耕耘深さを判断できる。しかしながら、代掻き作業を行う圃場の水分量や土質によっては、正確に耕耘深さを捉えることは困難であり、耕耘及び整地後の土塊の砕土具合等の土の状態を判断することはできない。
【0006】
特許文献2「表示方法」に記載のような圃場状態を判定方法は、地表面に設置する接地部材としてのエプロン及びレベラの回動状態を判定してすることによって得ているものであって、直接地中内の状態を測定しているわけではない。
実際に土塊が砕かれているかどうかは、作業者による確認がどうしても必要であり、砕土具合等の土の状態の判定を機械的に直接行うことが要望されている。
【0007】
本発明は上記課題に着眼してなされたものであり、耕耘後の砕土具合等の土の状態の判断を機械的な判断によって行うことが可能な農作業機を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明は、
走行機体に連結する農作業機であって、
前記農作業機は、回動可能に構成して泥土中の夾雑物を押し込んで埋め込むことが可能なレーキ体と、
前記レーキ体の回動角度を検出するとともに検出信号を送信可能なセンサと、
前記検出信号によってレーキ体の回動角度を判定可能な制御部と、を備え
前記制御部は前記センサからの検出信号によって、泥土中の土塊を検出可能である、
ことを特徴とする農作業機、
に係る。
【0009】
この発明は、更に、
前記レーキ体は上下方向に回動可能な整地体に対して回動可能に設ける、
ことを特徴とする農作業機、
に係る。
【0010】
この発明は、更に、
前記レーキ体は前記整地体の前方部から後端側にかけて設ける、
ことを特徴とする農作業機、
に係る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
苗キャップ
1か月前
個人
播種機
8日前
個人
尿処理材
23日前
株式会社アテックス
草刈機
1か月前
株式会社シマノ
釣り具
1日前
個人
室内栽培システム
4日前
井関農機株式会社
コンバイン
1日前
有限会社マイク
囲い罠
1日前
個人
水耕栽培システム
1か月前
井関農機株式会社
圃場管理装置
9日前
株式会社西部技研
空調システム
28日前
井関農機株式会社
移植機
8日前
井関農機株式会社
圃場管理装置
23日前
井関農機株式会社
圃場管理装置
23日前
井関農機株式会社
圃場管理装置
15日前
井関農機株式会社
圃場管理装置
23日前
井関農機株式会社
作業車両
1か月前
株式会社シマノ
釣竿
25日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
15日前
株式会社ダイイチ
海苔網の酸処理船
4日前
ダイハツ工業株式会社
草刈り機
1か月前
株式会社山田鉄工
海苔網処理船
4日前
株式会社山田鉄工
海苔網処理船
4日前
個人
ペット用歯磨き用具セット
1か月前
株式会社山田鉄工
海苔網処理船
4日前
関東農機株式会社
ロータリ管理機
1か月前
井関農機株式会社
作業車両
23日前
合同会社小林知財研鑽処
液体空気散布船
1か月前
大栄工業株式会社
誘引剤収容容器
2日前
松山株式会社
スタンド装置
8日前
三菱マヒンドラ農機株式会社
耕耘作業機
25日前
株式会社ドクター中松創研
農薬用ウクルマ
3日前
株式会社クボタ
歩行型作業機
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ