TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025078263
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2023190701
出願日
2023-11-08
発明の名称
自動列車運転装置
出願人
九州旅客鉄道株式会社
,
日本信号株式会社
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20250513BHJP(車両一般)
要約
【課題】列車の車輪が空転又は滑走した場合でも速度制限区間における速度超過を回避できる自動列車運転装置を提供する。
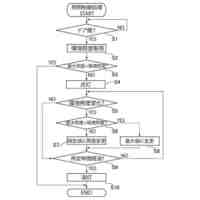
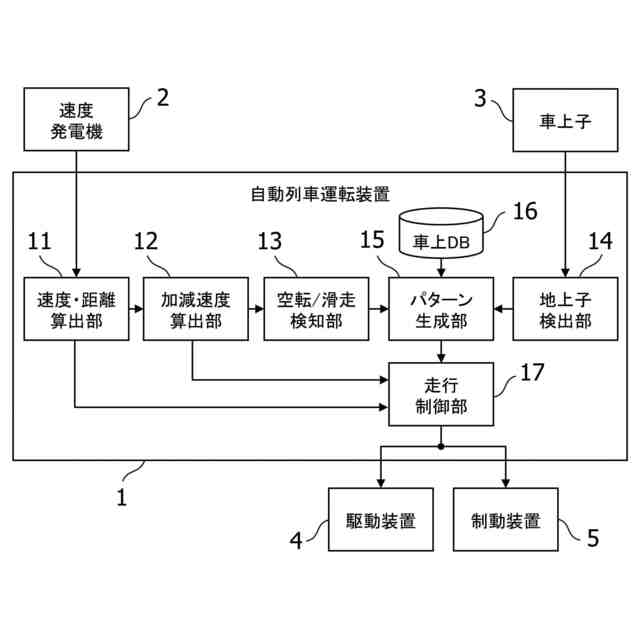
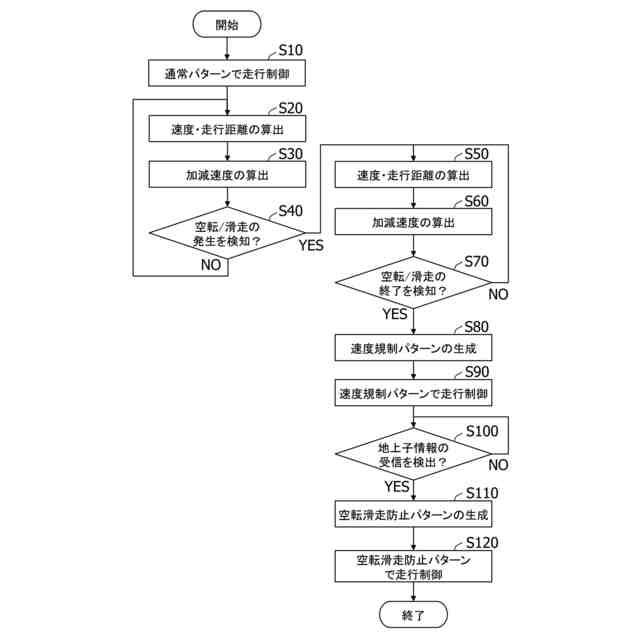
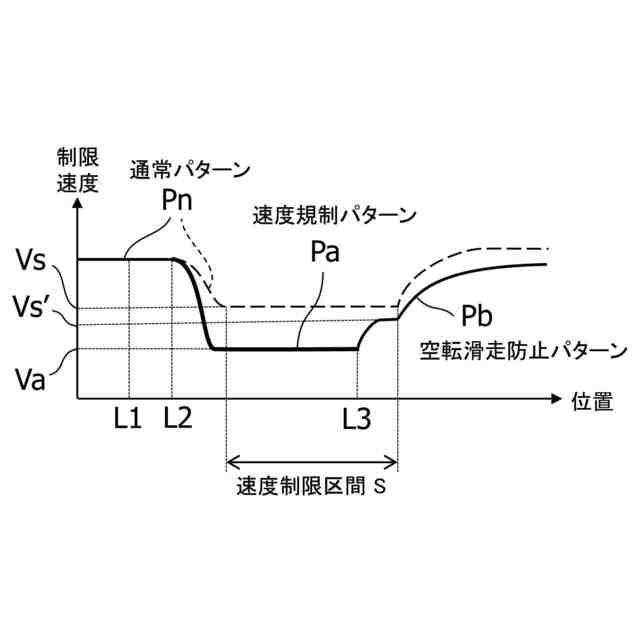
【解決手段】自動列車運転装置1は、列車の車輪の空転又は滑走を検知した場合、列車の速度を所定値以下に制限する列車制御を行う。自動列車運転装置1は、車輪の空転又は滑走を検知した場合、列車制御に用いる運転パターンを通常パターンから、列車の速度を走行路上における最低の制限速度以下に保つための速度規制パターンに切り替え、その後に地上側からの位置情報が車上側で取得されて列車位置の補正が行われると、速度規制パターンを他の運転パターンに切り替えるように構成されるのが好ましい。
【選択図】図2
特許請求の範囲
【請求項1】
列車の車輪の空転又は滑走を検知した場合、前記列車の速度を所定値以下に制限する列車制御を行う、自動列車運転装置。
続きを表示(約 1,000 文字)
【請求項2】
前記車輪の空転又は滑走を検知した場合、前記列車制御に用いる運転パターンを通常パターンから、前記列車の速度を走行路上における最低の制限速度以下に保つための速度規制パターンに切り替え、その後に地上側からの位置情報が車上側で取得されて列車位置の補正が行われると、前記速度規制パターンを他の運転パターンに切り替えるように構成されている、請求項1に記載の自動列車運転装置。
【請求項3】
前記他の運転パターンは、前記通常パターンに比べて許容上限速度及び加減速度が低い空転滑走防止パターンである、請求項2に記載の自動列車運転装置。
【請求項4】
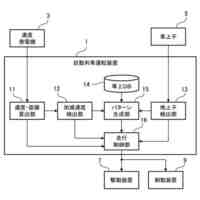
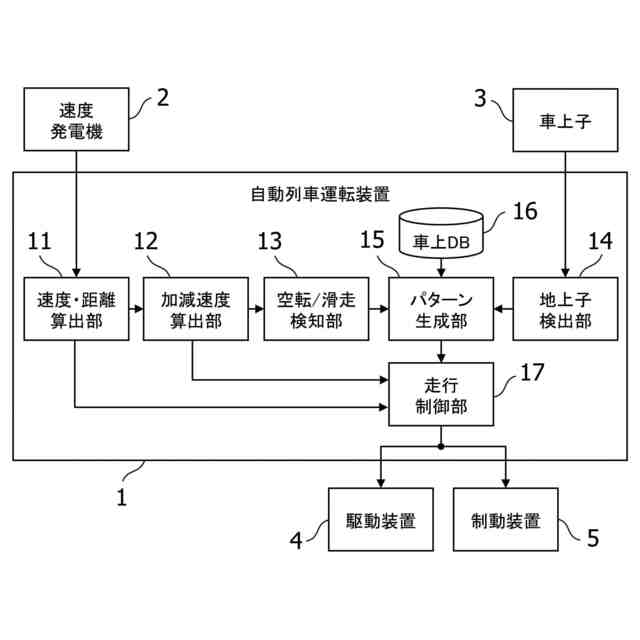
前記車輪の空転又は滑走を検知するためのパラメータが閾値を超えた場合に前記車輪の空転又は滑走の発生を検知し、該検知後に前記パラメータが前記閾値以下に低下した場合に前記車輪の空転又は滑走の終了を検知する検知部と、
前記走行路に沿って設置された地上子から送信される位置情報が、前記列車に搭載された車上子で受信され、該位置情報に従って、車上側で把握されている前記列車の位置が補正できたか否かを検出する地上子検出部と、
前記運転パターンを生成するパターン生成部と、
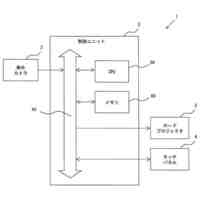
前記パターン生成部で生成された前記運転パターンに従って前記列車の走行状態を制御する走行制御部と、を含み、
前記パターン生成部は、前記検知部で前記車輪の空転又は滑走の終了が検知されたときに、前記運転パターンを前記通常パターンから前記速度規制パターンに切り替え、その後に前記地上子検出部で前記位置情報の受信による車上側の列車位置の補正が検出されたときに、前記速度規制パターンを前記空転滑走防止パターンに切り替える、請求項3に記載の自動列車運転装置。
【請求項5】
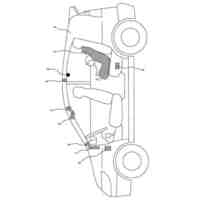
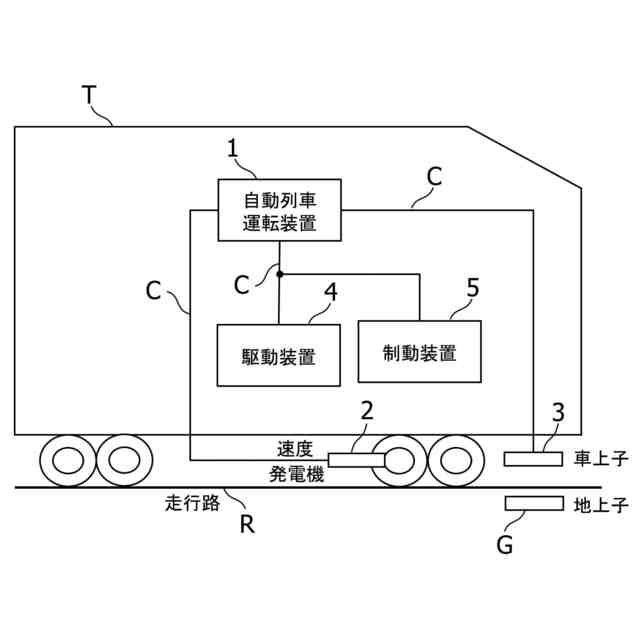
前記列車の車軸に取り付けられた速度発電機の出力信号に基づいて前記列車の加速度及び減速度を算出する加減速度算出部を含み、
前記検知部は、前記加減速度算出部で算出された加速度が空転検知閾値を超えた場合に前記車輪の空転の発生を検知し、前記加速度が前記空転検知閾値以下に低下した場合に前記車輪の空転の終了を検知するとともに、前記加減速度算出部で算出された減速度が滑走検知閾値を超えた場合に前記車輪の滑走の発生を検知し、前記減速度が前記滑走検知閾値以下に低下した場合に前記車輪の滑走の終了を検知する、請求項4に記載の自動列車運転装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、列車の走行状態を制御する自動列車運転装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
一般に、列車に搭載された車上装置は、車軸に取り付けられた速度発電機から出力される車軸の回転数に応じた信号を基に、自列車の速度及び位置を算出している。このとき、列車が走行するレール等の走行路が滑りやすい状況において、列車の加速時に車輪が空転した場合、又は減速時に車輪が滑走した場合に、速度発電機からの出力信号を用いて自列車の速度及び位置を正しく算出できない状況に陥ってしまう。
【0003】
このような状況に対処するための従来の技術として、例えば、特許文献1に開示されている車上装置では、車輪が滑走した場合に、滑走開始時の速度のまま滑走時間分だけ走行したとみなして自列車の先頭位置が補正されるとともに、予め設定した減速度で滑走時間分だけ走行したとみなして自列車の後端位置が補正される。また、車輪が空転した場合には、予め設定した加速度で空転時間分だけ走行したとみなして自列車の先頭位置が補正されるとともに、予め設定した減速度で空転時間分だけ走行したとみなして自列車の後端位置が補正される。これにより、車輪の滑走や空転が発生して速度発電機からの情報では位置を正確に把握できなくなった際にも、見かけ上の列車長が前後に延ばされることで、安全な停止制御が実現されるようにしている。
【先行技術文献】
【特許文献】
【0004】
特開2020-25389号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記従来の技術について、車輪が空転又は滑走した場合に算出される自列車の位置(先頭位置)は、想定される最大の加速度で列車が加速していると仮定したり、想定する最小の減速度で列車が減速していると仮定したりすることによって位置の補正が行われている。このため、補正後の自列車の位置は、車輪が空転又は滑走していない通常時に算出される自列車の位置よりも走行方向の前方に進んだ位置になる。つまり、車上装置は、車輪が空転又は滑走した場合の自列車の位置が通常時よりも先に進んでいると認識して、自列車の走行状態を制御することになる。
【0006】
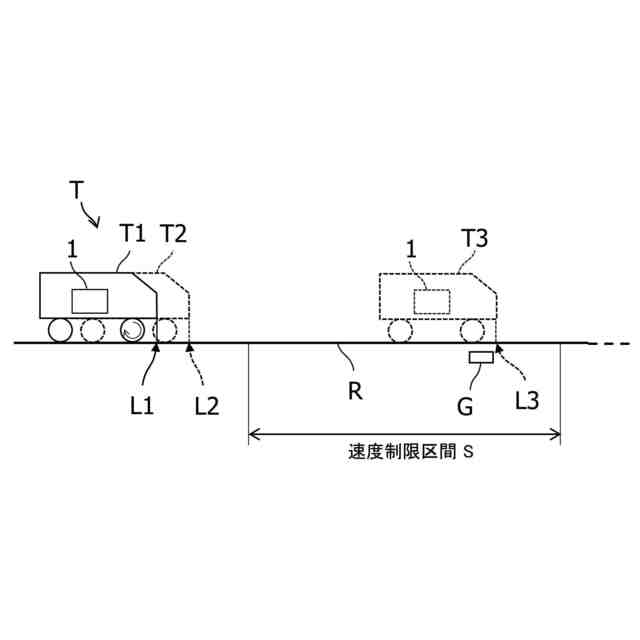
このとき、列車の走行方向の前側にカーブ等の速度制限区間があると、車上装置は、自列車の位置を先に進めた分だけ実際よりも手前側に速度制限区間があると認識して、列車を減速させるためのパターン(運転パターン)を作成する。この速度制限区間に対応して作成されるパターンでは、実際の速度制限区間よりも手前側で減速が開始され、列車が実際の速度制限区間を抜ける前に当該パターンが消えることになる。
【0007】
手動運転の列車では、運転士が速度制限区間を抜けたことを認識して速度を上げるが、自動運転の列車では、車上装置が運転パターンに従って列車制御を行う。このため、自動運転の列車で車輪が空転又は滑走した場合、速度制限区間を抜けていないのに速度が上昇して制限速度を超えてしまう可能性があり、改善の余地があった。
【0008】
本発明は上記の点に着目してなされたもので、列車の車輪が空転又は滑走した場合でも速度制限区間における速度超過を回避できる自動列車運転装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の目的を達成するため、本発明の一態様に係る自動列車運転装置は、列車の車輪の空転又は滑走を検知した場合、前記列車の速度を所定値以下に制限する列車制御を行う。
【発明の効果】
【0010】
本発明に係る自動列車運転装置の一態様によれば、列車の車輪が空転又は滑走した場合でも速度制限区間における速度超過を回避することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
九州旅客鉄道株式会社
自動列車運転装置
28日前
個人
飛行自動車
4か月前
個人
カーテント
14日前
個人
車窓用防虫網戸
1か月前
個人
警告装置
2か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
18日前
日本精機株式会社
ケース
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
2か月前
個人
キャンピングトライク
1日前
日本精機株式会社
表示装置
4か月前
個人
アンチロール制御装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
6日前
日本精機株式会社
照明装置
3か月前
井関農機株式会社
作業車両
8日前
個人
ブレーキシステム
2か月前
個人
ワイパーゴム性能保持具
27日前
株式会社松華
懸架装置
3か月前
個人
キャンピングトレーラー
1日前
井関農機株式会社
収穫作業車両
1か月前
横浜ゴム株式会社
タイヤ
2か月前
個人
自走式立体型洗車場
3か月前
個人
ステージカー
3か月前
個人
自動車ドア開度規制ベルト
2か月前
株式会社クラベ
ヒータユニット
1か月前
日本精機株式会社
車両用照明装置
4か月前
日本精機株式会社
車両用表示装置
29日前
日本精機株式会社
車両用表示装置
3か月前
マツダ株式会社
車両
3か月前
帝国繊維株式会社
作業車両
2か月前
日本精機株式会社
車両用投影装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ