TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068923
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023179047
出願日
2023-10-17
発明の名称
管路位置探査装置及び管路位置探査方法
出願人
日本電信電話株式会社
,
株式会社NTEC
,
株式会社アプライド・ビジョン・システムズ
代理人
個人
,
個人
,
個人
主分類
G01C
15/00 20060101AFI20250422BHJP(測定;試験)
要約
【課題】管路の位置をより正確に探査する。
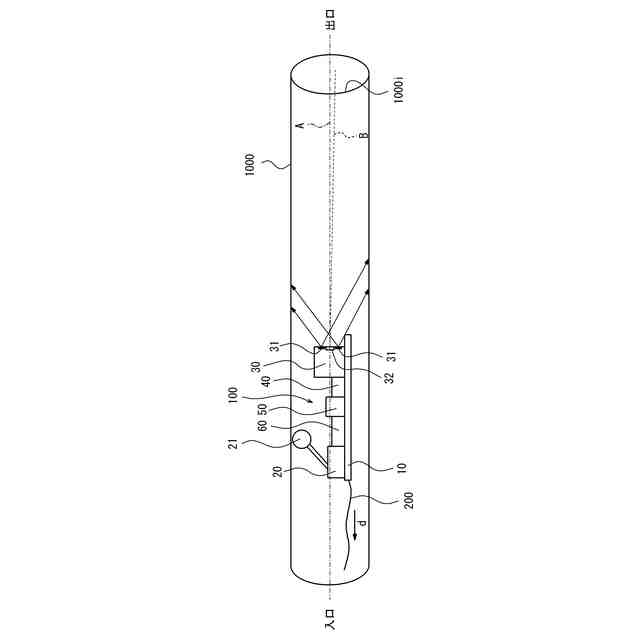
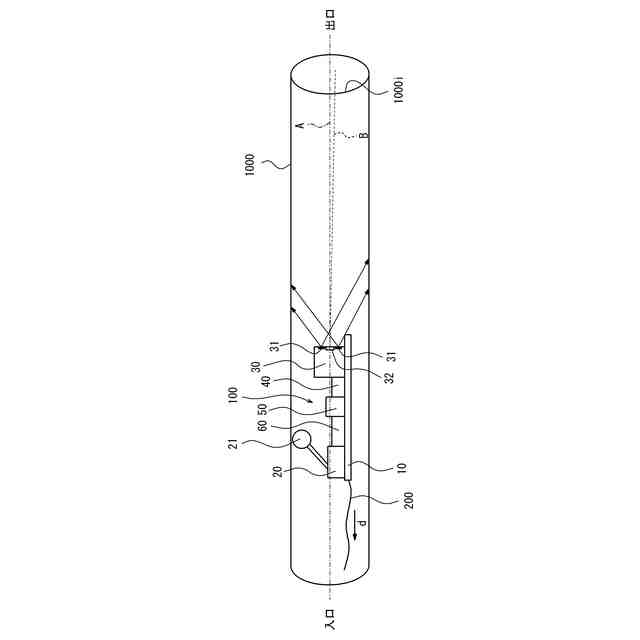
【解決手段】管の内部を移動する移動体と、前記移動体の移動距離を計測する距離計測器と、前記移動体に搭載され、前記管の、前記移動体の移動方向とは逆方向に位置する内面へ光を発し、前記内面で反射した光を受け、発光から受光までの時間に基づいて前記内面までの距離を算出する距離センサと、前記距離センサの姿勢を計測する姿勢計測器と、前記距離計測器により得られた前記移動距離の複数の計測値のそれぞれに対応付けて、前記距離センサにより得られた前記内面までの距離の各算出値と、前記姿勢計測器により得られた前記姿勢の各計測値とを示す探査データを生成するコンピュータと、を備える、管路位置探査装置が提供される。
【選択図】図1A
特許請求の範囲
【請求項1】
管の内部を移動する移動体と、
前記移動体の移動距離を計測する距離計測器と、
前記移動体に搭載され、前記管の、前記移動体の移動方向とは逆方向に位置する内面へ光を発し、前記内面で反射した光を受け、発光から受光までの時間に基づいて前記内面までの距離を算出する距離センサと、
前記距離センサの姿勢を計測する姿勢計測器と、
前記距離計測器により得られた前記移動距離の複数の計測値のそれぞれに対応付けて、前記距離センサにより得られた前記内面までの距離の各算出値と、前記姿勢計測器により得られた前記姿勢の各計測値とを示す探査データを生成するコンピュータと、
を備える、管路位置探査装置。
続きを表示(約 1,100 文字)
【請求項2】
前記距離センサが発した光の広がりを抑える集光器を更に備える、
請求項1に記載の管路位置探査装置。
【請求項3】
前記集光器の前記距離センサに対する向きを調整する姿勢調整器を更に備える、
請求項2に記載の管路位置探査装置。
【請求項4】
前記距離センサが、前記距離センサにおける、前記移動体の平面視で前記移動体の前記移動方向に直交する方向の両側に、前記内面へ光を発する発光体を備える、
請求項1から3の何れか一項に記載の管路位置探査装置。
【請求項5】
前記距離センサが、前記距離センサにおける、前記移動体の側面視で前記移動体の前記移動方向に直交する方向の両側に、前記内面へ光を発する発光体を備える、
請求項1から3の何れか一項に記載の管路位置探査装置。
【請求項6】
前記距離センサが、前記内面へ光を発する1つのみの発光体と、前記内面で反射した光を受ける1つのみの受光器と、を備える、
請求項1から3の何れか一項に記載の管路位置探査装置。
【請求項7】
前記発光体を、前記発光体が発する光の光軸に対して直交する面内で、前記受光器を中心に回転させる回転機器を更に備える、
請求項6に記載の管路位置探査装置。
【請求項8】
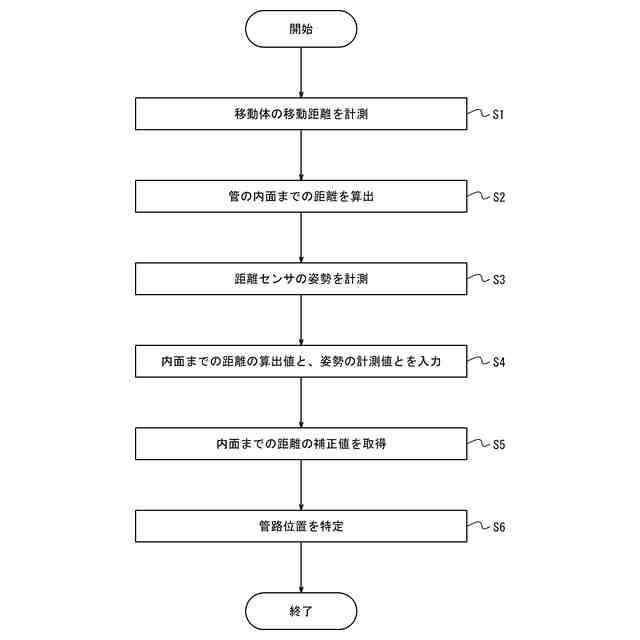
移動体を管の内部で移動させながら、距離計測器により、前記移動体の移動距離を計測することと、
前記移動体を前記管の内部で移動させながら、前記移動体に搭載された距離センサであって、前記管の、前記移動体の移動方向とは逆方向に位置する内面へ光を発し、前記内面で反射した光を受ける距離センサにより、発光から受光までの時間に基づいて前記内面までの距離を算出することと、
前記移動体を前記管の内部で移動させながら、姿勢計測器により、前記距離センサの姿勢を計測することと、
コンピュータにより、前記距離計測器により得られた前記移動距離の、互いに一定の値だけ異なる複数の計測値のそれぞれに対応する、前記距離センサにより得られた前記内面までの距離の算出値と、前記姿勢計測器により得られた前記姿勢の計測値とを取得することと、
前記コンピュータにより、前記移動距離の前記複数の計測値のそれぞれについて、取得された前記内面までの距離の算出値を、取得された前記姿勢の計測値に基づいて補正して、前記内面までの距離の補正値を取得することと、
前記コンピュータにより、前記移動距離の前記複数の計測値のそれぞれについて、前記管の管路位置を、取得された前記内面までの距離の補正値を用いて特定することと、
を含む、管路位置探査方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、管路位置探査装置及び管路位置探査方法に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
通信ケーブル又は送電線は地下において管の内部を通っている。そのような管は、地中に埋没していたり遮蔽物に遮蔽されていたりして、目視困難又は目視不可能な場合が少なくない。しかし、そのような場合でも、管が三次元的にどのように配置されているか、探査が必要な場合がある。その探査方法としていくつかの方法が知られている。
【0003】
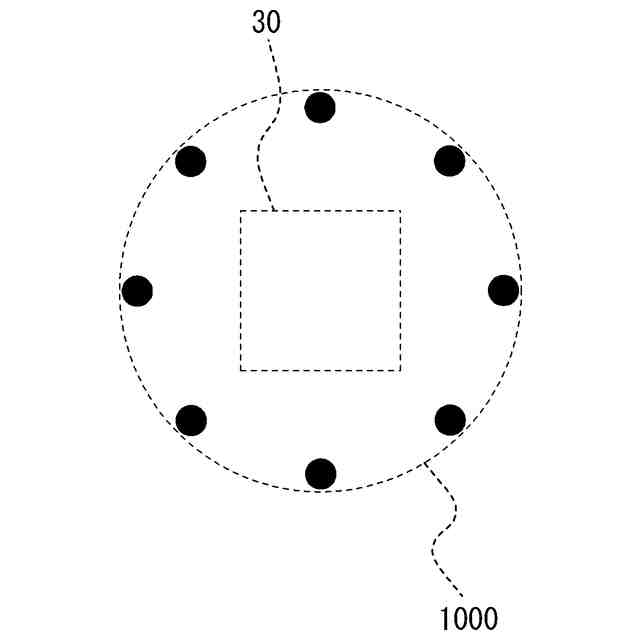
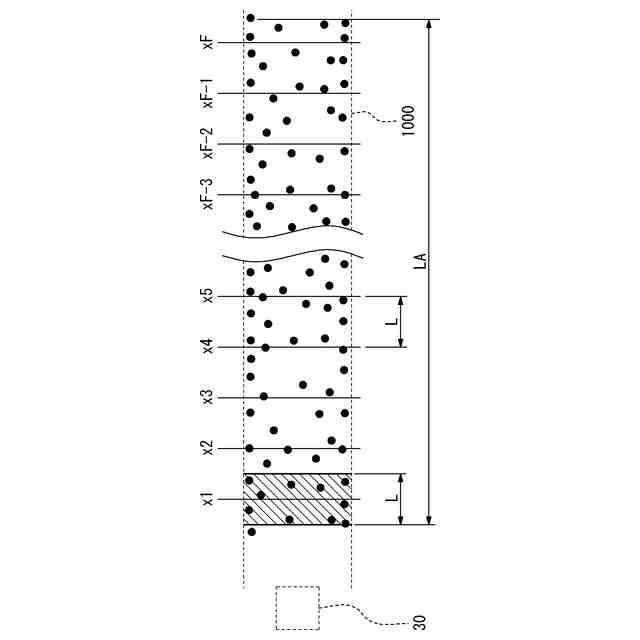
特許文献1に記載のように、複数のリングを管の延長方向に並べ、管路位置探査装置を管内で移動させつつ光を発し、複数のリングからの反射光をカメラで撮影し、得られた画像から管路の位置を探査する方法が知られている。この方法では、管の断面を探査するときに、各リングが管の中央に配置されている必要がある。そこで、各リングに多数のバネをリング周方向に等間隔になるように取り付け、それらのバネを管の内面に当て、バネの弾性力により各リングを管の中央に浮かせる構成が採用されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-012646号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の方法では、多数のバネの位置を等間隔に配置することが困難な場合があり、また多数のバネの弾性が必ずしも均一ではないため、各リングが管の中央に配置されず、管路の位置の探査精度に影響が生じるおそれがある。
【0006】
かかる事情に鑑みてなされた本開示の目的は、管路の位置をより正確に探査することである。
【課題を解決するための手段】
【0007】
一実施形態に係る管路位置探査装置は、
管の内部を移動する移動体と、
前記移動体の移動距離を計測する距離計測器と、
前記移動体に搭載され、前記管の、前記移動体の移動方向とは逆方向に位置する内面へ光を発し、前記内面で反射した光を受け、発光から受光までの時間に基づいて前記内面までの距離を算出する距離センサと、
前記距離センサの姿勢を計測する姿勢計測器と、
前記距離計測器により得られた前記移動距離の複数の計測値のそれぞれに対応付けて、前記距離センサにより得られた前記内面までの距離の各算出値と、前記姿勢計測器により得られた前記姿勢の各計測値とを示す探査データを生成するコンピュータと、
を備える。
【0008】
一実施形態に係る管路位置探査方法は、
移動体を管の内部で移動させながら、距離計測器により、前記移動体の移動距離を計測することと、
前記移動体を前記管の内部で移動させながら、前記移動体に搭載された距離センサであって、前記管の、前記移動体の移動方向とは逆方向に位置する内面へ光を発し、前記内面で反射した光を受ける距離センサにより、発光から受光までの時間に基づいて前記内面までの距離を算出することと、
前記移動体を前記管の内部で移動させながら、姿勢計測器により、前記距離センサの姿勢を計測することと、
コンピュータにより、前記距離計測器により得られた前記移動距離の、互いに一定の値だけ異なる複数の計測値のそれぞれに対応する、前記距離センサにより得られた前記内面までの距離の算出値と、前記姿勢計測器により得られた前記姿勢の計測値とを取得することと、
前記コンピュータにより、前記移動距離の前記複数の計測値のそれぞれについて、取得された前記内面までの距離の算出値を、取得された前記姿勢の計測値に基づいて補正して、前記内面までの距離の補正値を取得することと、
前記コンピュータにより、前記移動距離の前記複数の計測値のそれぞれについて、前記管の管路位置を、取得された前記内面までの距離の補正値を用いて特定することと、
を含む。
【発明の効果】
【0009】
本開示によれば、管路の位置をより正確に探査できるようになる。
【図面の簡単な説明】
【0010】
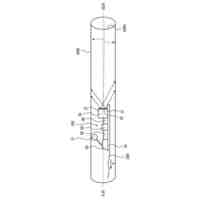
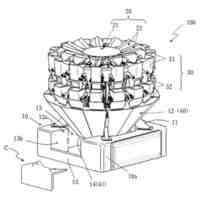
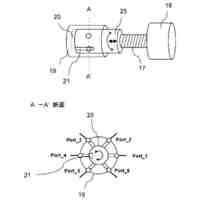
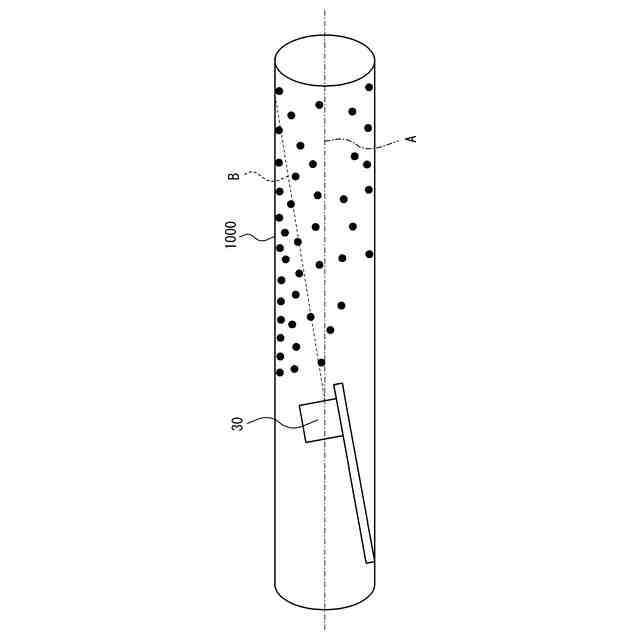
管路位置探査装置の第1実施形態を、管の内部に配置された状態で示す斜視図である。
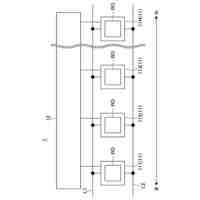
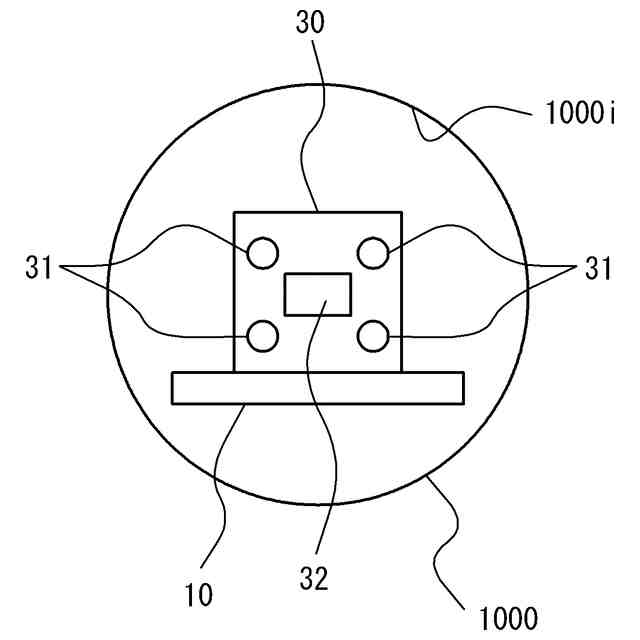
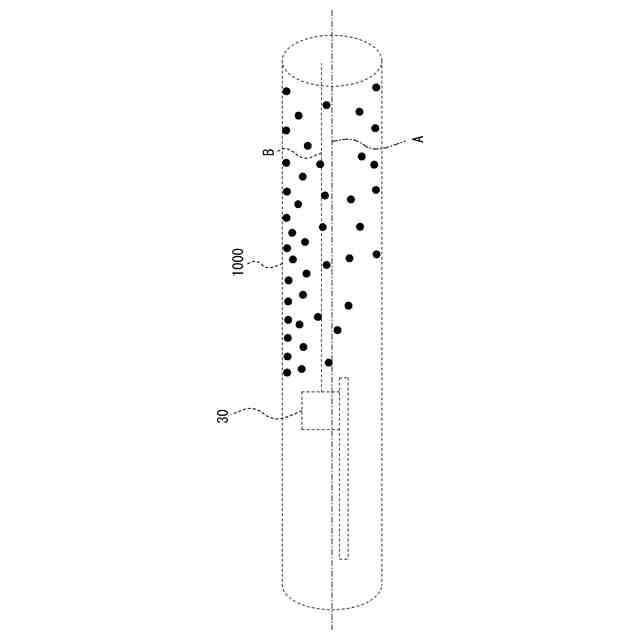
図1Aに示される管路位置探査装置を示す正面図である。
管路位置探査方法の一実施形態の動作を示すフローチャートである。
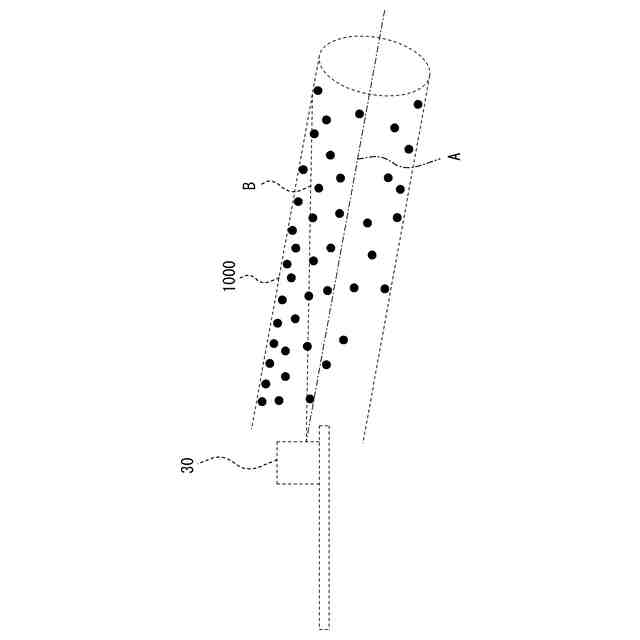
図1Aに示される管路位置探査装置を、受光器が受光する光の光軸が上方に傾いている状態で示す斜視図である。
図3Aを、距離センサを基準にして示す図である。
距離センサと補正された3次元データとを示す図である。
コンピュータにより生成された可視化情報を簡略化して示す斜視図である。
図4Bの可視化情報を示す正面図である。
距離センサが取得した3次元補正データを示す、移動体の移動方向に沿う図である。
図5Aの3次元補正データ及び中心位置を示す正面図である。
図5Bの中心位置を示す、移動体の移動方向に直交する方向から見た図である。
重ね合わされた中心位置群を示す、移動体の移動方向に沿う図である。
管路位置探査装置の第2実施形態を、管の内部に配置された状態で示す斜視図である。
図7Aに示される距離センサを示す正面図である。
図7Aに示される距離センサを示す側面図である。
距離センサが集光器を備えていない場合における、反射光、及び受光器が受ける光の振幅の時間変化を示す図である。
距離センサが集光器を備える場合における、反射光、及び受光器が受ける光の振幅の時間変化を示す図である。
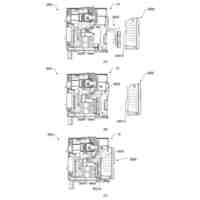
管路位置探査装置の第3実施形態を、管の内部に配置された状態で示す斜視図である。
図9Aに示される距離センサを示す正面図である。
図9Aに示される距離センサを示す側面図である。
管路位置探査装置の第4実施形態を、管の内部に配置された状態で示す斜視図である。
図10Aに示される距離センサを示す正面図である。
図10Aに示される距離センサを示す側面図である。
管路位置探査装置の第5実施形態を、管の内部に配置された状態で示す斜視図である。
図11Aに示される距離センサを示す正面図である。
図11Aに示される距離センサを示す側面図である。
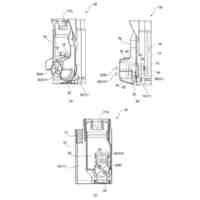
管路位置探査装置の第6実施形態を、管の内部に配置された状態で示す上方から見た斜視図である。
図12Aに示される距離センサを示す正面図である。
図12Aに示される距離センサを示す側面図である。
コンピュータにより取得される情報を示す側面図である。
図13Aの線P-Pに沿う断面図である。
管路位置探査装置の第7実施形態を、管の内部に配置された状態で示す斜視図である。
図14Aに示される距離センサを示す正面図である。
図14Aに示される距離センサを示す側面図である。
コンピュータにより取得される情報を示す平面図である。
図15Aの線P-Pに沿う断面図である。
管路位置探査装置の第8実施形態を、管の内部に配置された状態で示す斜視図である。
図16Aに示される距離センサを示す正面図である。
図16Aに示される距離センサを示す側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電信電話株式会社
演算装置、演算方法及びプログラム
10日前
日本電信電話株式会社
解析装置、解析方法及び解析プログラム
2日前
日本電信電話株式会社
抽出装置、抽出方法及び抽出プログラム
2日前
日本電信電話株式会社
管路位置探査装置及び管路位置探査方法
4日前
日本電信電話株式会社
検証装置、検証方法および検証プログラム
2日前
日本電信電話株式会社
解析装置、解析方法および解析プログラム
2日前
日本電信電話株式会社
振動センシング装置及び振動センシング方法
3日前
個人
粒子分析装置
10日前
株式会社イシダ
計量装置
4日前
個人
アクセサリー型テスター
11日前
エイブリック株式会社
電流検出回路
24日前
株式会社ミツトヨ
画像測定機
12日前
東レ株式会社
シート状物の検査方法
25日前
株式会社テイエルブイ
振動検出装置
10日前
栄進化学株式会社
浸透探傷用濃縮液
17日前
ダイハツ工業株式会社
試料セル
10日前
トヨタ自動車株式会社
検査装置
4日前
株式会社チノー
放射光測温装置
24日前
トヨタ自動車株式会社
電気自動車
11日前
大和製衡株式会社
計量装置
17日前
株式会社 キョーワ
食品搬送装置
24日前
日本特殊陶業株式会社
ガスセンサ
24日前
日本特殊陶業株式会社
ガスセンサ
24日前
理研計器株式会社
ガス検出器
12日前
理研計器株式会社
ガス検出器
12日前
理研計器株式会社
ガス検出器
12日前
理研計器株式会社
ガス検出器
12日前
理研計器株式会社
ガス検出器
12日前
東ソー株式会社
簡易型液体クロマトグラフ
6日前
大成建設株式会社
画像表示システム
20日前
富士電機株式会社
エンコーダ
25日前
株式会社熊谷組
計測システム
17日前
日本碍子株式会社
ガスセンサ
24日前
リバークル株式会社
荷重移動試験装置
4日前
株式会社 システムスクエア
検査装置
18日前
株式会社ニコン
検出装置
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ