TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062180
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171067
出願日
2023-10-02
発明の名称
車両制御装置、車両制御方法、および車両制御プログラム
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60W
30/095 20120101AFI20250407BHJP(車両一般)
要約
【課題】自車の無駄となる回避動作を抑制して、回避動作の効率を向上させることができる車両制御装置、車両制御方法、および車両制御プログラムを提供する。
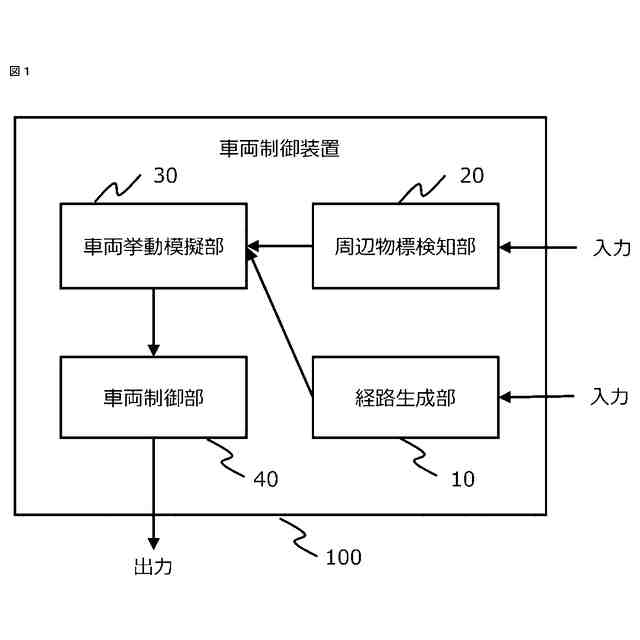
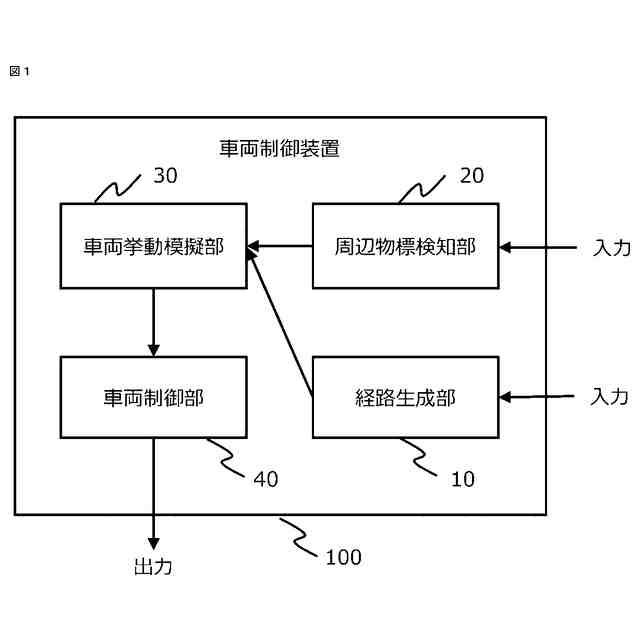
【解決手段】車両制御装置は、自車の走行状態の検出データに基づき、走行ルートを生成する経路生成部10と、自車の外部環境状態の検出データに基づき、周辺物標を検知する周辺物標検知部20と、経路生成部10および周辺物標検知部20からの出力に基づき、自車の将来の動作に伴い、周辺物標が自車を回避する回避動作を事前に推定して、自車の将来の車両挙動を複数模擬する車両挙動模擬部30と、車両挙動模擬部30による模擬結果に基づき、車両の制御内容を決定する車両制御部40とを備えている。
【選択図】図1
特許請求の範囲
【請求項1】
自車の走行状態として速度と位置を含む検出データに基づいて、走行ルートを生成する経路生成部と、
前記自車の外部環境状態として周辺のカメラ画像を含む検出データに基づいて、周辺物標を検知する周辺物標検知部と、
前記経路生成部および前記周辺物標検知部からの出力に基づいて、前記自車の将来の動作に伴い、前記周辺物標が前記自車を回避する回避動作を事前に推測し、前記自車の将来の車両挙動を複数模擬する車両挙動模擬部と、
前記車両挙動模擬部による模擬結果に基づいて、前記自車の操舵と加減速を含む車両の制御内容を決定する車両制御部と、
を備えた車両制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記車両挙動模擬部は、前記周辺物標の回避動作を、事前に複数パターンの試行または検証によって推定することを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記車両制御部は、前記車両挙動模擬部の模擬結果から、前記自車と前記周辺物標との距離を基準として、最接近距離が最長となる前記自車の将来の車両挙動を選択して、前記車両の制御内容を決定することを特徴とする請求項1に記載の車両制御装置。
【請求項4】
前記車両制御部は、前記車両挙動模擬部の模擬結果から、前記自車と前記周辺物標とが衝突回避の距離内で加減速度を基準にして、前記自車の加減速度が最小となる前記自車の将来の車両挙動を選択して、前記車両の制御内容を決定することを特徴とする請求項1に記載の車両制御装置。
【請求項5】
前記自車の外部と通信を行う通信部を備え、
前記周辺物標検知部は、前記通信部を経由して、前記外部環境状態の検出データを取り込むことを特徴とする請求項1に記載の車両制御装置。
【請求項6】
前記自車の外部と通信を行う通信部を備え、
前記車両挙動模擬部は、前記通信部を経由することにより、前記経路生成部および前記周辺物標検知部からの出力を前記自車の外部へ送り、前記自車の将来の車両挙動を模擬した模擬結果を、前記自車に取り込むことを特徴とする請求項1に記載の車両制御装置。
【請求項7】
前記車両挙動模擬部による模擬結果に基づいて、複数の走行ルートによる自動運転が継続可能か否かを判定する自動運転可否判定部を備え、
前記自動運転可否判定部の判定結果に基づいて、前記経路生成部による走行ルートを変更することを特徴とする請求項1に記載の車両制御装置。
【請求項8】
前記自動運転可否判定部の判定結果に基づいて、前記経路生成部によるすべての走行ルートにおいて自動運転の継続が不可能な場合に、自動運転から手動運転へ切替える運転切替部を備えたことを特徴とする請求項7に記載の車両制御装置。
【請求項9】
前記運転切替部による自動運転から手動運転への切替えに伴い、車内へ警告を発する警告装置を備えたことを特徴とする請求項8に記載の車両制御装置。
【請求項10】
前記経路生成部、前記周辺物標検知部、前記車両挙動模擬部からの各出力を記録して、現在の走行ルートおよび周辺物標が記録済か否かを判定する走行状態蓄積部を備え、
前記走行ルートおよび前記周辺物標が記録済であれば、前記車両制御部は、前記走行状態蓄積部に記録された前記走行ルートおよび前記周辺物標による模擬結果に基づいて、前記車両の制御内容を決定することを特徴とする請求項1に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御方法、および車両制御プログラムに関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来から、自車の周辺車両の移動予測を行い、将来の危険度合いを考慮した車両制御を行う技術が開発されている。この種の技術は、自車に対する障害物を検出し、自車の障害物に対するリスク度を算出して、このリスク度に基づいて運転者に自車の回避動作を行うための運転操作を促すように車両機器の作動を制御するというものである。
【0003】
また、緊急時に最適な回避制御を行う技術として、自車の前後左右と道路状況など外部環境に基づいて、歩行者、他車などの障害物を検出した環境マップを作成し、環境マップをもとに現在から将来の危険度(TTC:Time To Collision)マップを作成して、危険度マップと自車の走行状態とに基づいて、障害物の回避を想定した自車の回避動作を複数推定するものがある。
これら推定された回避動作ごとに衝突被害を推定して、さらに環境マップの死角領域から新たな障害物が出現する可能性も考慮して、推定された回避動作に干渉する可能性を加味した衝突被害に基づいて、最適な回避動作を選択するように車両を制御することが行われる(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特許第4760715号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の技術では、自車の周辺車両の移動予測を行い、TTCマップの危険度に加えて、環境マップの死角に存在する見えない車両も考慮した、回避動作を実施するものである。
しかしながら、歩行者、他車などの障害物である周辺物標が想定通り動くとは限らず、例えば、特許文献1に開示された技術では、自車の将来の動作に影響を受ける歩行者、他車などの周辺物標の回避動作が考慮されておらず、特定の一瞬の速度ベクトルをもとに、将来の危険度マップ(TTCマップ)を作成しているという問題がある。現実的には、自車の将来の動作に影響を受けた周辺物標の回避動作により、当初、想定していた自車の回避動作が将来の姿から大きく乖離する可能性がある。すなわち、先行文献に開示された技術では、自車の将来の動作に影響を受ける周辺物標の回避動作によっては、自車は無駄な回避動作を選択しているという課題がある。
【0006】
本開示は、上記のような課題を解決するためになされたものであり、自車の将来の動作に影響を受ける周辺物標の回避動作を事前に推定して、自車の将来の車両挙動を複数模擬することにより、自車の無駄となる回避動作を抑制して、回避動作の効率を向上させることができる車両制御装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る車両制御装置は、
自車の走行状態として速度と位置を含む検出データに基づいて、走行ルートを生成する経路生成部と、
前記自車の外部環境状態として周辺のカメラ画像を含む検出データに基づいて、周辺物標を検知する周辺物標検知部と、
前記経路生成部および前記周辺物標検知部からの出力に基づいて、前記自車の将来の動作に伴い、前記周辺物標が前記自車を回避する回避動作を事前に推測し、前記自車の将来の車両挙動を複数模擬する車両挙動模擬部と、
前記車両挙動模擬部による模擬結果に基づいて、前記自車の操舵と加減速を含む車両の制御内容を決定する車両制御部と、
を備えたものである。
【発明の効果】
【0008】
本開示によれば、自車の将来の動作に影響を受ける周辺物標の回避動作を事前に推定して、自車の将来の車両挙動を複数模擬することにより、自車の無駄となる回避動作を抑制して、回避動作の効率を向上させることができる車両制御装置が得られる。
【図面の簡単な説明】
【0009】
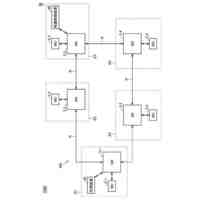
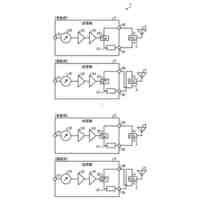
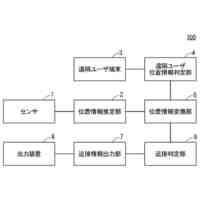
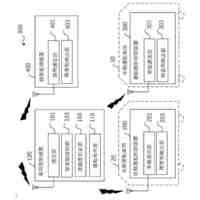
実施の形態1に係る車両制御装置の概略構成を示すブロック図である。
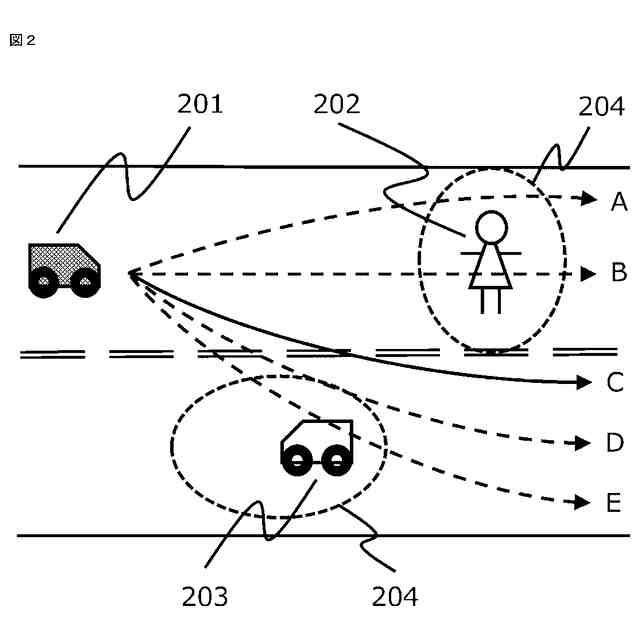
実施の形態1に係る車両制御装置の模擬内容を説明する模式図である。
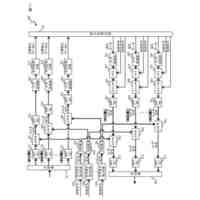
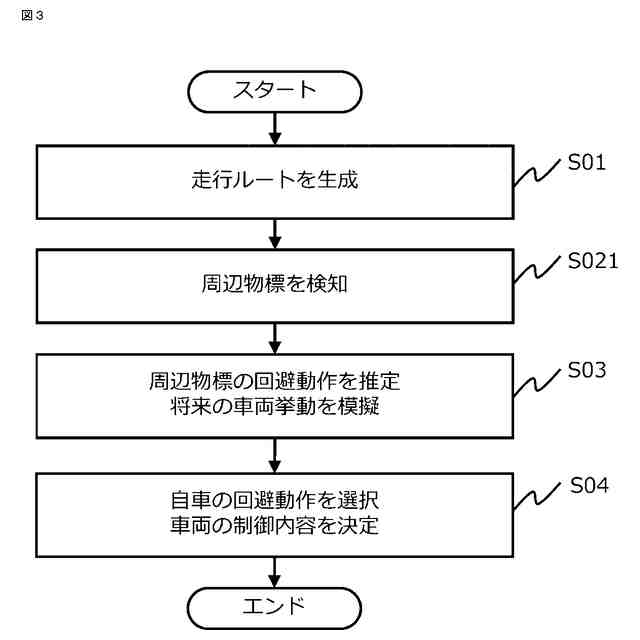
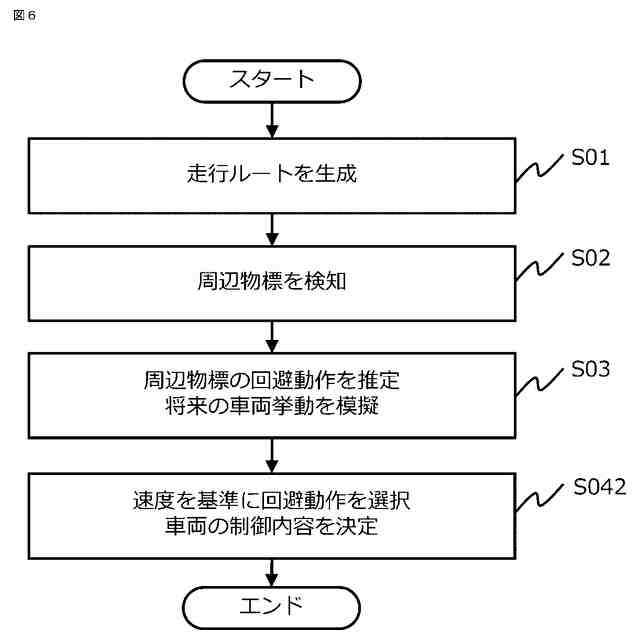
実施の形態1に係る車両制御装置の制御方法を示すフローチャートである。
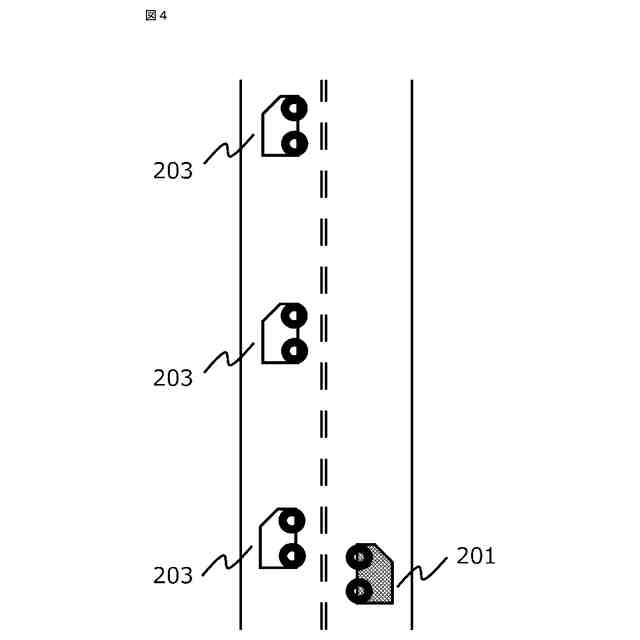
実施の形態1に係る車両制御装置の模擬内容について、車線変更の例を説明する模式図である。
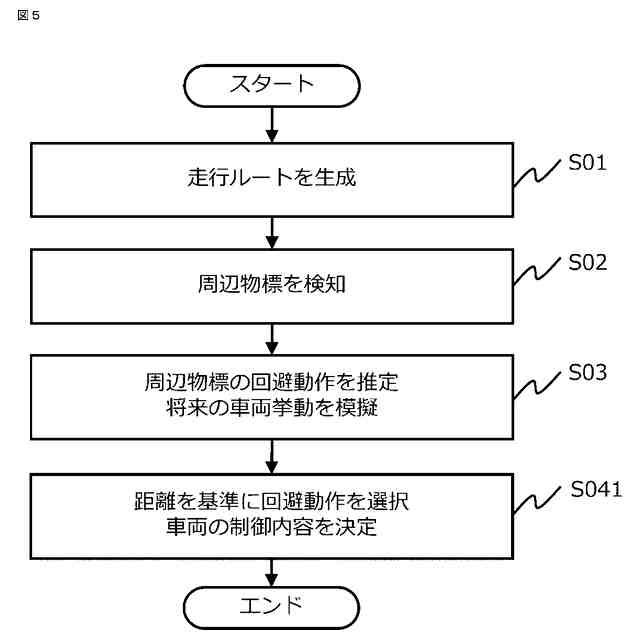
図4に係る制御方法の一例を示すフローチャートである。
図4に係る制御方法の他の例を示すフローチャートである。
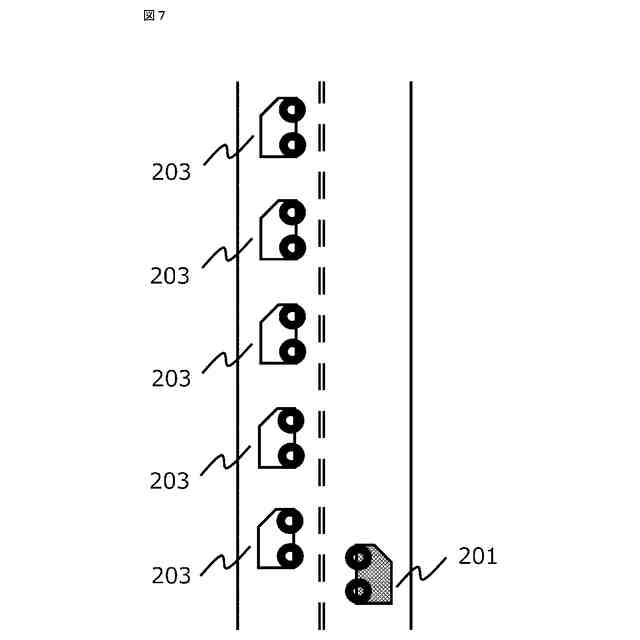
実施の形態1に係る車両制御装置の模擬内容について、渋滞割り込みの例を説明する模式図である。
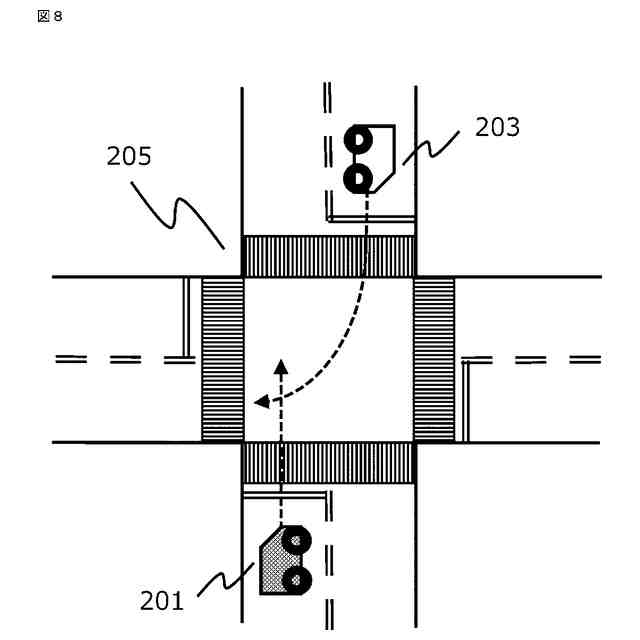
実施の形態1に係る車両制御装置の模擬内容について、交差点通過の例を説明する模式図である。
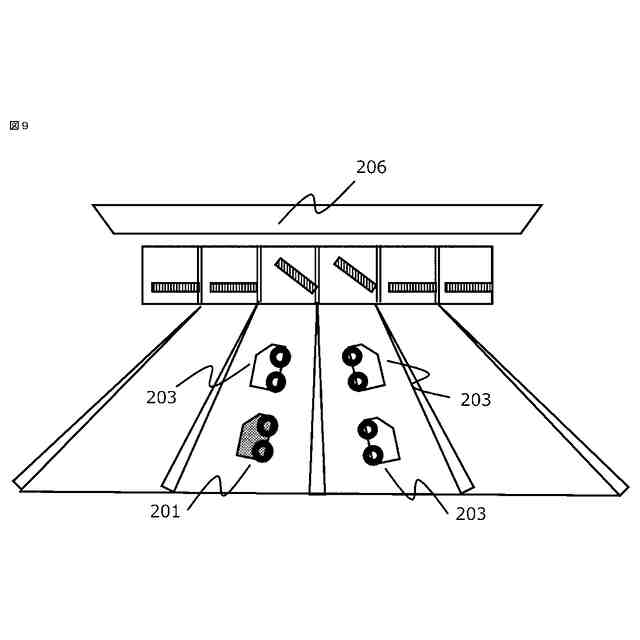
実施の形態1に係る車両制御装置の模擬内容について、料金所通過の例を説明する模式図である。
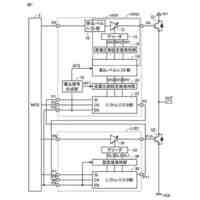
実施の形態2に係る車両制御装置の概略構成を示すブロック図である。
実施の形態2に係る車両制御装置において他の概略構成を示すブロック図である。
図10に係る制御方法を示すフローチャートである。
図11に係る制御方法を示すフローチャートである。
実施の形態3に係る車両制御装置の概略構成を示すブロック図である。
図14に係る制御方法を示すフローチャートである。
実施の形態3に係る車両制御装置において他の概略構成を示すブロック図である。
図16に係る制御方法を示すフローチャートである。
実施の形態4に係る車両制御装置の概略構成を示すブロック図である。
図18に係る制御方法を示すフローチャートである。
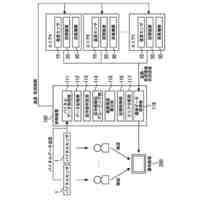
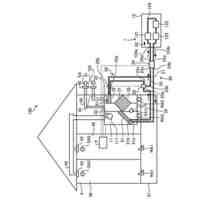
実施の形態1~4に係る車両制御装置のハードウェア構成の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、本実施の形態について図を参照して説明する。各図中、同一符号は、同一または相当部分を示すものとする。なお、図1~図20は一実施の形態に係るものであって、これらの図面によって本開示が限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
送風機
9日前
三菱電機株式会社
照明器具
10日前
三菱電機株式会社
電子機器
2日前
三菱電機株式会社
発光装置
17日前
三菱電機株式会社
放電装置
17日前
三菱電機株式会社
半導体装置
18日前
三菱電機株式会社
半導体装置
25日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
半導体装置
18日前
三菱電機株式会社
光通信装置
17日前
三菱電機株式会社
加熱調理器
11日前
三菱電機株式会社
空調システム
9日前
三菱電機株式会社
半導体製造装置
27日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
半導体モジュール
24日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
手持ち式電気掃除機
10日前
三菱電機株式会社
保護リレーシステム
24日前
三菱電機株式会社
アレーアンテナ装置
10日前
三菱電機株式会社
モータ及び送風装置
9日前
三菱電機株式会社
水位変化検出システム
13日前
三菱電機株式会社
拡管工具および管の拡管方法
24日前
三菱電機株式会社
空気調和機および空調システム
2日前
三菱電機株式会社
送風システム及び空調システム
18日前
三菱電機株式会社
送風システム及び空調システム
18日前
三菱電機株式会社
ベーパーチャンバー及び冷却装置
1か月前
三菱電機株式会社
バーチャルオフィス支援システム
25日前
三菱電機株式会社
信号伝達回路および電力変換装置
9日前
三菱電機株式会社
電気掃除機用吸込具及び電気掃除機
10日前
三菱電機株式会社
レーダ装置および物体位置検出方法
17日前
三菱電機株式会社
導波管アンテナおよびレーダシステム
17日前
三菱電機株式会社
移動体制御装置および移動体制御方法
17日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
27日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
27日前
三菱電機株式会社
車両管制装置および車両管制システム
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ