TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025057903
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167738
出願日
2023-09-28
発明の名称
情報処理装置、情報処理方法及び情報処理プログラム
出願人
株式会社計測リサーチコンサルタント
代理人
弁理士法人伊藤IP特許事務所
主分類
G01S
19/44 20100101AFI20250402BHJP(測定;試験)
要約
【課題】所定の対象物に対するGNSSの観測結果に基づいて該対象物の変位を算出するときに、その算出精度を可及的に向上させることができる技術を提供する。
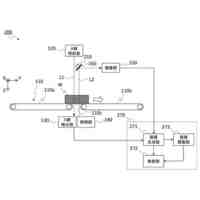
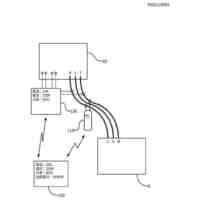
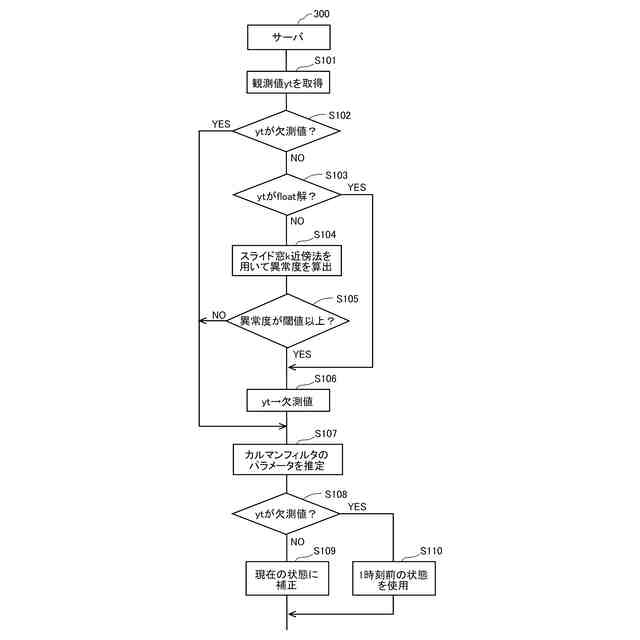
【解決手段】本開示の情報処理装置は、対象物に設置された観測点を測位衛星によって測位した測位座標を取得することと、測位座標に対してカルマンフィルタを用いて誤差処理を行うことと、カルマンフィルタにより誤差処理された測位座標である誤差補正座標に基づいて、対象物の変位を算出することと、を実行する制御部を備える。そして、制御部は、カルマンフィルタを用いて誤差処理を行うとき、測位座標に対する所定の事前処理に基づいて判定された該測位座標の状態に基づいて、誤差補正座標を算出する。
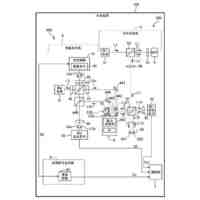
【選択図】図2
特許請求の範囲
【請求項1】
所定の対象物における観測点に基づいて、該対象物の変位を算出する情報処理装置であって、
前記対象物に設置された前記観測点を測位衛星によって測位した測位座標を取得することと、
前記測位座標に対してカルマンフィルタを用いて誤差処理を行うことと、
前記カルマンフィルタにより誤差処理された前記測位座標である誤差補正座標に基づいて、前記対象物の変位を算出することと、
を実行する制御部を備え、
前記制御部は、
前記カルマンフィルタを用いて誤差処理を行うとき、前記測位座標に対する所定の事前処理に基づいて判定された該測位座標の状態に基づいて、前記誤差補正座標を算出する、
情報処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記制御部は、
前記事前処理に含まれる第1処理として、前記測位座標が欠測値であるか否かを判定し、前記測位座標が欠測値ではないと判定される場合、前記測位座標がfloat解であるときに該測位座標を欠測値とみなす処理を実行する、
請求項1に記載の情報処理装置。
【請求項3】
前記制御部は、
前記第1処理において前記測位座標が欠測値ではないと判定される場合、前記事前処理に含まれる第2処理として、前記測位座標がfix解であるときにスライド窓k近傍法を用いて該測位座標の異常度を算出し、該異常度が所定の閾値以上となる前記測位座標を欠測値とみなす処理を実行する、
請求項2に記載の情報処理装置。
【請求項4】
前記制御部は、
前記カルマンフィルタを用いて誤差処理を行うとき、複数の誤差パターンに基づいて予め定められた事前解を用いて、カルマンゲインを算出する、
請求項2に記載の情報処理装置。
【請求項5】
前記制御部は、
現在の前記測位座標と前回の前記測位座標とに基づいて、現在の誤差パターンを判定し、該現在の誤差パターンが前回の誤差パターンと異なる場合、前記複数の誤差パターンのうち該現在の誤差パターンと合致する誤差パターンに基づいて定められた前記事前解を用いて、前記カルマンゲインを算出する、
請求項4に記載の情報処理装置。
【請求項6】
所定の対象物における観測点に基づいて、該対象物の変位を算出する情報処理方法であって、
コンピュータが、
前記対象物に設置された前記観測点を測位衛星によって測位した測位座標を取得することと、
前記測位座標に対してカルマンフィルタを用いて誤差処理を行うことと、
前記カルマンフィルタにより誤差処理された前記測位座標である誤差補正座標に基づいて、前記対象物の変位を算出することと、
を実行し、
前記コンピュータは、
前記カルマンフィルタを用いて誤差処理を行うとき、前記測位座標に対する所定の事前処理に基づいて判定された該測位座標の状態に基づいて、前記誤差補正座標を算出する、
情報処理方法。
【請求項7】
所定の対象物における観測点に基づいて、該対象物の変位を算出する情報処理プログラムであって、
コンピュータに、
前記対象物に設置された前記観測点を測位衛星によって測位した測位座標を取得することと、
前記測位座標に対してカルマンフィルタを用いて誤差処理を行うことと、
前記カルマンフィルタにより誤差処理された前記測位座標である誤差補正座標に基づいて、前記対象物の変位を算出することと、
を実行させ、
前記コンピュータに、
前記カルマンフィルタを用いて誤差処理を行わせるとき、前記測位座標に対する所定の事前処理に基づいて判定された該測位座標の状態に基づいて、前記誤差補正座標を算出させる、
情報処理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の対象物における観測点に基づいて、該対象物の変位を算出する情報処理装置、情報処理方法及び情報処理プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
橋梁などの構造物の健全度、耐荷力性を評価するうえで、構造物の変位を計測することが重要な要素となっている。
【0003】
そして、近年、衛星の電波を受信し、アンテナの位置を3次元で把握できる衛星観測システム(GNSS:Global Navigation Satellite System)を利用して、対象物の観測点の座標変化を計測する技術が実用化されている。
【0004】
例えば、特許文献1には、GNSSの観測結果に基づいて、人工知能(Artificial Intelligence:AI)を用いて大量の観測データを処理することによって斜面の安定度判定を支援するシステムが開示されている。このシステムでは、機械学習によって生成された対象斜面の変動モデルに、観測期間に観測された観測座標変動データ等を入力することで、該対象斜面の今後の座標の変化である予測座標変動が算出される。
【先行技術文献】
【特許文献】
【0005】
特開2019-85712号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
衛星の電波を受信し、アンテナの位置を3次元で把握できる衛星観測システム(GNSS:Global Navigation Satellite System)は、近年、小型化、高精度化、低価格化しており、橋梁などの構造物の変位を計測する有効な手段となり得る。しかしながら、現状の観測データの処理方法では、測位精度の影響でシステム同定が難解で、構造物の健全度、耐荷力性等に対する診断・予測が困難である。ここで、特許文献1に記載の技術によれば、人工知能(Artificial Intelligence:AI)を用いて大量の観測データを処理することによって、対象物の変位の算出精度を向上させることができるようにも思われる。しかしながら、特許文献1に記載の技術では、緩慢な変位を示す斜面を対象として時系列処理を行っており、橋梁などの構造物の健全性をモニタリングするために求められるリアルタイム性を有した時系列処理に適用することに困難性が伴い得る。
【0007】
一方で、観測データには種々の要因により生じるノイズが含まれ、当該ノイズが構造物の健全度、耐荷力性等に対する診断・予測性能低下の要因となり得る。そこで、観測データからノイズを除去し真値を推定するために、カルマンフィルタを用いることが考えられる。しかしながら、従来までのカルマンフィルタを用いた誤差処理では、観測結果において誤差(ばらつき)が多いGNSSの観測データに対して、精度の良い誤差補正を行うことが困難であった。
【0008】
本開示の目的は、所定の対象物に対するGNSSの観測結果に基づいて該対象物の変位を算出するときに、その算出精度を可及的に向上させることができる技術を提供することにある。
【課題を解決するための手段】
【0009】
本開示の情報処理装置は、所定の対象物における観測点に基づいて、該対象物の変位を算出する情報処理装置である。この情報処理装置は、前記対象物に設置された前記観測点を測位衛星によって測位した測位座標を取得することと、前記測位座標に対してカルマンフィルタを用いて誤差処理を行うことと、前記カルマンフィルタにより誤差処理された前記測位座標である誤差補正座標に基づいて、前記対象物の変位を算出することと、を実行する制御部を備える。そして、前記制御部は、前記カルマンフィルタを用いて誤差処理を行うとき、前記測位座標に対する所定の事前処理に基づいて判定された該測位座標の状態に基づいて、前記誤差補正座標を算出する。
【0010】
そして、本開示の情報処理装置において、前記制御部は、前記事前処理に含まれる第1処理として、前記測位座標が欠測値であるか否かを判定し、前記測位座標が欠測値ではないと判定される場合、前記測位座標がfloat解であるときに該測位座標を欠測値とみなす処理を実行する。更に、この場合、前記制御部は、前記第1処理において前記測位座標が欠測値ではないと判定される場合、前記事前処理に含まれる第2処理として、前記測位座標がfix解であるときにスライド窓k近傍法を用いて該測位座標の異常度を算出し、該異常度が所定の閾値以上となる前記測位座標を欠測値とみなす処理を実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
位置検出装置
11日前
東レ株式会社
シート状物の検査方法
9日前
エイブリック株式会社
電流検出回路
8日前
栄進化学株式会社
浸透探傷用濃縮液
1日前
東ソー株式会社
自動分析装置及び方法
11日前
株式会社チノー
放射光測温装置
8日前
大和製衡株式会社
計量装置
1日前
日本特殊陶業株式会社
ガスセンサ
8日前
日本特殊陶業株式会社
ガスセンサ
8日前
株式会社 キョーワ
食品搬送装置
8日前
株式会社熊谷組
計測システム
1日前
大成建設株式会社
画像表示システム
4日前
日本碍子株式会社
ガスセンサ
8日前
富士電機株式会社
エンコーダ
9日前
株式会社 システムスクエア
検査装置
2日前
株式会社ヨコオ
シートコンタクタ
11日前
東洋計器株式会社
超音波式流量計
1日前
東洋計器株式会社
超音波式流量計
1日前
東洋計器株式会社
超音波式流量計
1日前
TDK株式会社
温度センサ
9日前
株式会社デンソー
試験装置
4日前
シチズンファインデバイス株式会社
圧力検出装置
8日前
シチズンファインデバイス株式会社
圧力検出装置
8日前
東洋製罐株式会社
巻締寸法測定装置
3日前
オムロン株式会社
光電センサ
8日前
株式会社藤興業
半球形凹型傾斜角度計
1日前
TDK株式会社
センサデバイス
8日前
旭光電機株式会社
電気的特性提供装置
8日前
株式会社ミツバ
モータ制御装置
8日前
キーナスデザイン株式会社
可動式ヒートシンク
1日前
セイコーエプソン株式会社
干渉計
11日前
メディカテック株式会社
分注装置
4日前
株式会社イシダ
物品滞留装置
4日前
JRCモビリティ株式会社
充電用温度判定回路
11日前
オムロン株式会社
光干渉測距センサ
1日前
内山工業株式会社
分析装置用部材
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ