TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025056523
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023166051
出願日
2023-09-27
発明の名称
車両制御装置及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01C
3/06 20060101AFI20250401BHJP(測定;試験)
要約
【課題】車両の周囲の環境を三次元計測可能な車両制御装置及びプログラムを提供する。
【解決手段】第1計測部2により車両の周囲の空間を撮像した撮像画像と、電磁波に基づいて前記車両の周囲に存在する対象物を計測する第2計測部4の計測値とに基づいて前記対象物の寸法を算出する演算部12を備え、前記演算部は、前記撮像画像に含まれる前記対象物の画像に基づいて前記対象物の寸法の第1計測値を算出し、前記第1計測値と、前記第2計測部により計測された前記対象物の寸法の第2計測値との誤差が所定値以下の場合、前記第2計測値を前記対象物の寸法値に設定し、前記寸法値に基づいて前記空間の三次元データを生成する、車両制御装置10である。
【選択図】図1
特許請求の範囲
【請求項1】
第1計測部により車両の周囲の空間を撮像した撮像画像と、電磁波に基づいて前記車両の周囲に存在する対象物を計測する第2計測部の計測値とに基づいて前記対象物の寸法を算出する演算部を備え、
前記演算部は、
前記撮像画像に含まれる前記対象物の画像に基づいて前記対象物の寸法の第1計測値を算出し、
前記第1計測値と、前記第2計測部により計測された前記対象物の寸法の第2計測値との誤差が所定値以下の場合、前記第2計測値を前記対象物の寸法値に設定し、
前記寸法値に基づいて前記空間の三次元データを生成する、
車両制御装置。
続きを表示(約 770 文字)
【請求項2】
前記演算部は、
所定距離において離間して撮像された前記撮像画像に含まれる前記対象物の画素数に基づいて前記対象物の第1寸法を算出し、
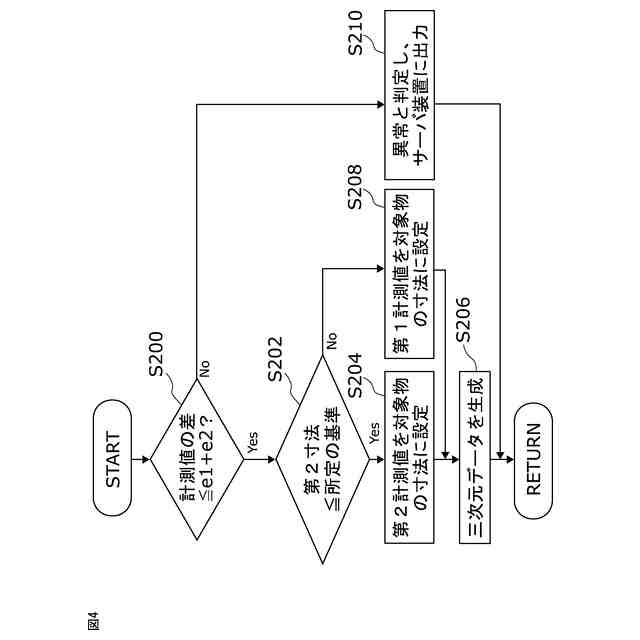
前記所定距離において計測された前記第2計測値に基づく前記対象物の第2寸法が前記第1寸法に所定の基準の範囲内において合致する場合、前記第2計測値を前記対象物の前記寸法値に設定する、
請求項1に記載の車両制御装置。
【請求項3】
前記演算部は、
前記所定距離において計測された前記第2計測値に基づく前記対象物の第2寸法が前記第1寸法に所定の基準を超えた場合、前記第1計測値を前記対象物の前記寸法値に設定する、
請求項2に記載の車両制御装置。
【請求項4】
前記演算部は、
前記第1計測値と前記第2計測値との差分が所定の誤差レベルを超えた場合、前記第1計測値と前記第2計測値とのうち、いずれか一方に異常が生じていると判定し、所定の通知を出力する、
請求項1に記載の車両制御装置。
【請求項5】
車両制御装置に搭載されたコンピュータにインストールされたプログラムであって、
第1計測部により車両の周囲の空間を撮像した撮像画像を取得し、
第2計測部により電磁波に基づいて前記車両の周囲に存在する対象物を計測し、
前記撮像画像に含まれる前記対象物の画像に基づいて前記対象物の寸法の第1計測値を算出し、
前記第1計測値と、前記第2計測部により計測された前記対象物の寸法の第2計測値との誤差が所定値以下の場合、前記第2計測値を前記対象物の寸法値に設定し、
前記寸法値に基づいて前記空間の三次元データを生成する処理をコンピュータに実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の周囲を三次元計測可能な車両制御装置及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、車両の運転支援のために、車両の周囲の環境の三次元データを取得することが求められている。特許文献1には、ステレオカメラを用いて対象物までの距離を単眼状態及びステレオカメラ状態において撮像し、算出可能な距離算出装置が記載されている。この距離算出装置は、カメラを単眼により撮像した単眼カメラ画像と、一対のカメラをステレオカメラとして撮像したステレオカメラ画像とのボケ量に基づいて対象物までの距離を算出するように構成されている。特許文献1に記載された技術によれば、単眼カメラ画像とステレオカメラ画像とのうちいずれか一方の画像に基づいて対象物までの距離を算出可能としている。
【先行技術文献】
【特許文献】
【0003】
特開2013-186043号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術は、予めパターンマッチング可能な車両等の対象物を撮像することで、画像に含まれる対象物の領域を認識し、対象物の寸法を推定している。車両の周囲の環境は、岩石によって形成された地形、平面や傾斜面により形成された凹凸を有する不整地等のパターンマッチングに基づいて寸法を設定できない地形を含んでいる。このような地形においては、カメラにより撮像された撮像画像に基づいてパターンマッチングを用いて三次元データを生成することが困難となる可能性がある。
【0005】
本発明は、車両の周囲の環境を三次元計測可能な車両制御装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、第1計測部により車両の周囲の空間を撮像した撮像画像と、電磁波に基づいて前記車両の周囲に存在する対象物を計測する第2計測部の計測値とに基づいて前記対象物の寸法を算出する演算部を備え、前記演算部は、前記撮像画像に含まれる前記対象物の画像に基づいて前記対象物の寸法の第1計測値を算出し、前記第1計測値と、前記第2計測部により計測された前記対象物の寸法の第2計測値との誤差が所定値以下の場合、前記第2計測値を前記対象物の寸法値に設定し、前記寸法値に基づいて前記空間の三次元データを生成する、車両制御装置である。
【発明の効果】
【0007】
本発明によれば、車両の周囲の環境を三次元計測することができる。
【図面の簡単な説明】
【0008】
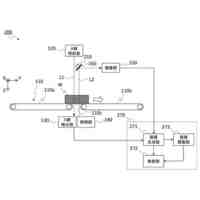
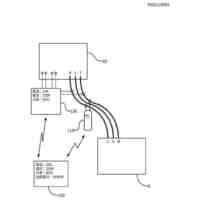
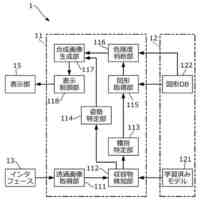
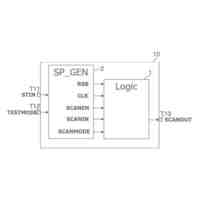
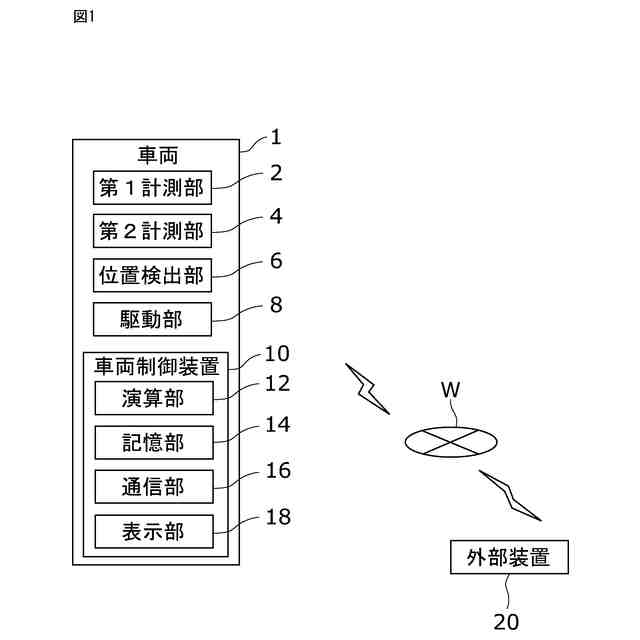
実施形態に係る車両制御装置の構成を示すブロック図である。
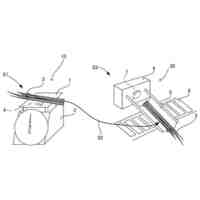
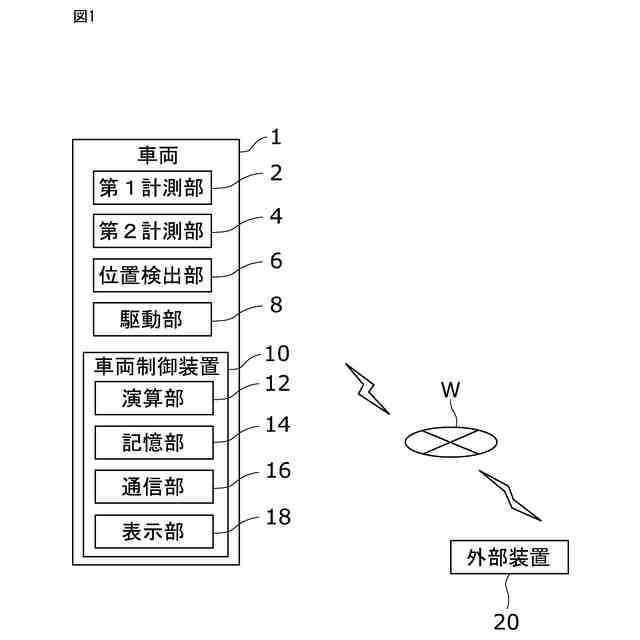
撮像画像に含まれる対象物の寸法と画素との関係を示す図である。
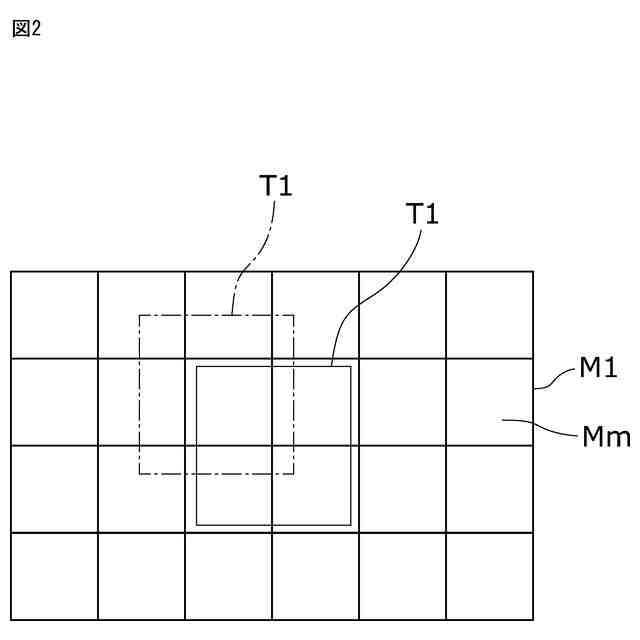
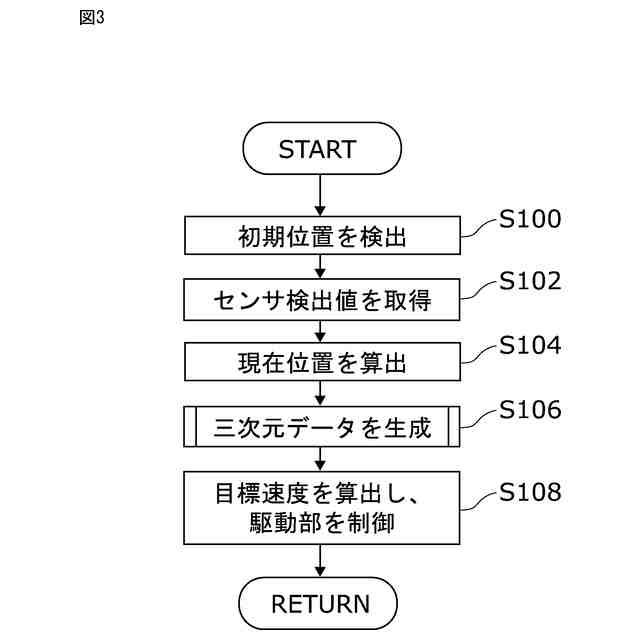
車両制御装置において実行される車両制御方法の処理の流れを示すフローチャートである。
車両制御装置において実行される三次元データを生成する処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
図1に示されるように、車両1は、ネットワークWを介して外部装置20と通信可能に接続されている。外部装置20は、例えば、他の車両、車両1を遠隔に管制可能な設備に設けられたサーバ装置である。車両1は、搭載される車両制御装置10により制御される自動運転車両であってもよいし、車両制御装置10により運転支援される手動運転車両であってもよい。
【0010】
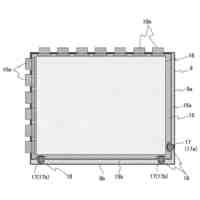
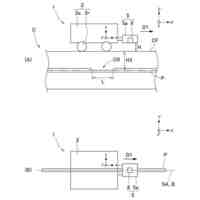
車両1は、周囲の環境を計測する第1計測部2及び第2計測部4と、現在位置を検出する位置検出部6と、走行の動力源となる駆動部8と、車両1を制御する車両制御装置10とを備えている。第1計測部2は、対象物までの距離を計測可能なステレオカメラにより構成されている。第1計測部2は、例えば、一対のカメラ素子を備えている。第1計測部2は、対象物の撮像画像を撮像する。第1計測部2は、車両1の前進方向の範囲を撮像するものだけでなく、車両1の側方に向かう範囲や後方に向かう範囲を撮像するものが設けられていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
シート状物の検査方法
8日前
栄進化学株式会社
浸透探傷用濃縮液
今日
エイブリック株式会社
電流検出回路
7日前
株式会社チノー
放射光測温装置
7日前
大和製衡株式会社
計量装置
今日
株式会社 キョーワ
食品搬送装置
7日前
日本特殊陶業株式会社
ガスセンサ
7日前
日本特殊陶業株式会社
ガスセンサ
7日前
株式会社熊谷組
計測システム
今日
富士電機株式会社
エンコーダ
8日前
大成建設株式会社
画像表示システム
3日前
日本碍子株式会社
ガスセンサ
7日前
株式会社 システムスクエア
検査装置
1日前
株式会社デンソー
試験装置
3日前
東洋計器株式会社
超音波式流量計
今日
東洋計器株式会社
超音波式流量計
今日
東洋計器株式会社
超音波式流量計
今日
TDK株式会社
温度センサ
8日前
シチズンファインデバイス株式会社
圧力検出装置
7日前
シチズンファインデバイス株式会社
圧力検出装置
7日前
東洋製罐株式会社
巻締寸法測定装置
2日前
オムロン株式会社
光電センサ
7日前
株式会社ミツバ
モータ制御装置
7日前
旭光電機株式会社
電気的特性提供装置
7日前
株式会社藤興業
半球形凹型傾斜角度計
今日
TDK株式会社
センサデバイス
7日前
株式会社イシダ
物品滞留装置
3日前
メディカテック株式会社
分注装置
3日前
キーナスデザイン株式会社
可動式ヒートシンク
今日
TDK株式会社
センサ
8日前
オムロン株式会社
光干渉測距センサ
今日
日本信号株式会社
表示装置
8日前
ローム株式会社
半導体装置
今日
株式会社オーケープランニング
スパン調整法
7日前
キヤノン株式会社
放射線撮影装置及び放射線検出器
今日
株式会社四国総合研究所
非破壊検査方法
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ