TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025054911
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023164137
出願日
2023-09-27
発明の名称
物品輸送システム、物品輸送方法及び物品輸送プログラム
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
G01C
21/34 20060101AFI20250401BHJP(測定;試験)
要約
【課題】複雑な制御を必要とせずに移動エネルギー消費量を抑えた物品輸送を実現する。
【解決手段】処理回路は、複数のUGV予定経路に夫々対応するUGV毎に、前記UAVが物品を前記UGVに渡すと仮定する中継点を決定し、前記UGV予定経路に夫々対応する前記複数のUGV毎に、前記UGV予定経路における前記UGVの現在地から前記中継点までのUGV移動コストと、UAV予定経路における前記UAVの現在地から前記中継点までのUAV移動コストと、を含む合計コストを計算し、前記UGV予定経路に夫々対応する前記複数のUGVから、前記合計コストが最小である前記UGVを選択する。
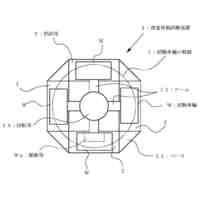
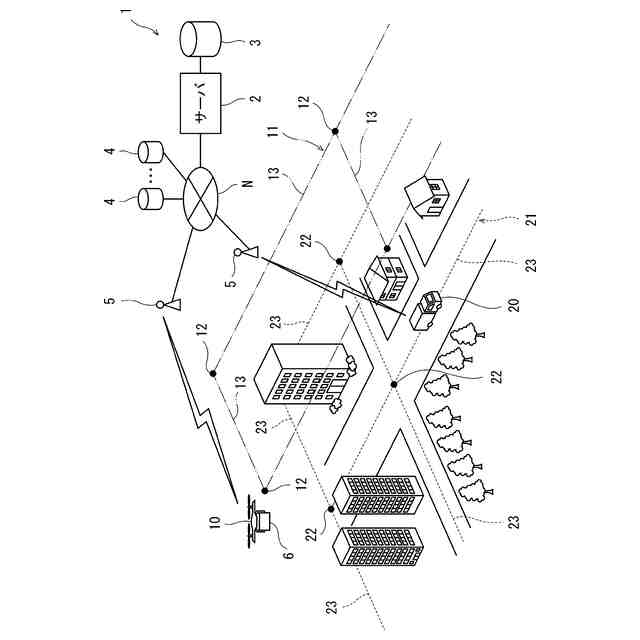
【選択図】図1
特許請求の範囲
【請求項1】
空中を含む三次元内の点を示す複数の第1ノード、及び、前記第1ノード同士を夫々結ぶ複数の第1リンクを含むUAV行路と、前記第1リンク毎に関連付けられ、前記複数の第1リンクを夫々通過するのに必要な第1リンクコストと、前記UAV行路における前記UAVの予定経路であるUAV予定経路と、地上の点を示す複数の第2ノード、及び、前記第2ノード同士を夫々結ぶ複数の第2リンクを含むUGV行路と、前記第2リンク毎に関連付けられ、前記複数の第2リンクを夫々通過するのに必要な第2リンクコストと、前記UGV行路における前記複数のUGVの予定経路である複数のUGV予定経路と、を記憶するデータベースに接続するように設定され、無人航空機である少なくとも1つのUAVと無人地上車両である複数のUGVとが用いられる物品輸送システムであって、
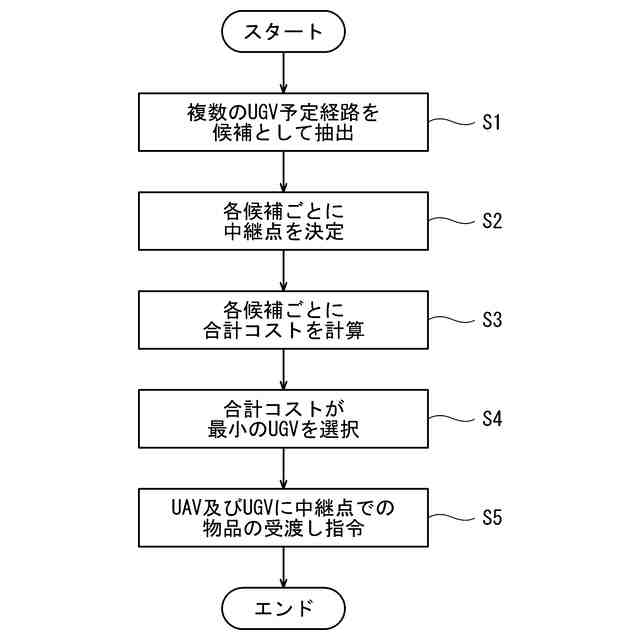
前記複数のUGV予定経路に夫々対応する前記複数のUGV毎に、物品を運ぶ前記UAVが前記物品を前記UGVに渡すと仮定する中継点を決定することと、
前記複数のUGV予定経路に夫々対応する前記複数のUGV毎に、前記第1及び第2リンクコストに基づいて、前記UGV予定経路における前記UGVの現在地から前記中継点までのUGV移動コストと、前記UAV予定経路における前記UAVの現在地から前記中継点までのUAV移動コストと、を含む合計コストを計算することと、
前記複数のUGV予定経路に夫々対応する前記複数のUGVから、前記合計コストが最小である前記UGVを選択することと、
前記選択されたUGVに対応する前記中継点において前記UAVから前記選択されたUGVに前記物品を渡すことを、前記UAV及び前記選択されたUGVに指令することと、
を行うように構成されている処理回路を備える、物品輸送システム。
続きを表示(約 1,700 文字)
【請求項2】
前記複数のUGV予定経路を選択することは、前記UAVの予定経路と前記複数のUGVの予定経路との間の各距離に基づいて、前記複数のUGVの予定経路から前記複数のUGV予定経路を抽出することを含む、請求項1に記載の物品輸送システム。
【請求項3】
前記複数のUGV予定経路を抽出することは、平面視での前記距離がゼロであり前記UAV予定経路に対して経度及び緯度が重なる部分を有する前記UGV予定経路を抽出することを含む、請求項2に記載の物品輸送システム。
【請求項4】
前記選択されたUGVに対応する前記UGV予定経路と前記UAV予定経路との間の距離は、ゼロよりも大きく、
前記中継点を決定することは、前記UGV予定経路上に前記中継点を決定することを含む、請求項1に記載の物品輸送システム。
【請求項5】
前記中継点は、ドローンポートである、請求項1に記載の物品輸送システム。
【請求項6】
前記UAV行路及び前記UGV行路は、第1管轄区域及び第2管轄区域を含む複数の管轄区域ごとに設定されており、
前記少なくとも1つのUAVは、複数のUAVを含み、
前記複数のUAV予定経路は、前記第1管轄区域に収まる第1予定経路と、前記第2管轄区域に収まる第2予定経路と、を含み、
前記複数のUGVの前記予定経路は、前記第1管轄区域に収まる第1予定経路と、前記第2管轄区域に収まる第2予定経路と、を含み、
前記処理回路は、
前記データベースから前記第1管轄区域において前記第1予定経路を選択することと、
前記第1予定経路に対応する前記UGVに関する前記合計コストが閾値以上であるときに、前記データベースから前記第2管轄区域において前記第2予定経路を選択することと、を行うように構成され、
前記中継点を決定することは、前記第1予定経路に対応する前記UAVが前記第2予定経路に対応する前記UGVに渡すと仮定する中継点を前記第1管轄区域において決定することを含み、
前記合計コストが最小である前記UGVを選択することは、前記第2予定経路に対応する前記UGVに関する前記合計コストが前記第1予定経路に対応する前記UGVに関する前記合計コストよりも小さいときに、前記第2予定経路に対応する前記UGVを選択することを含む、請求項1に記載の物品輸送システム。
【請求項7】
前記合計コストは、前記UGV行路における前記UGVの前記中継点から前記物品の配達先までのUGV移動コストを更に含む、請求項1乃至6のいずれか1項に記載の物品輸送システム。
【請求項8】
前記第2リンクコストは、
前記第2リンクの長さを含む固定情報に基づいて決定される固定コストと、
前記第2リンクの渋滞情報、前記第2リンクの道路情報、前記第2リンクの交通規制情報、前記第2リンクの天候情報、又は、時間帯情報の少なくとも1つを含む変動情報に基づいて決定される変動コストと、を含む、請求項1乃至6のいずれか1項に記載の物品輸送システム。
【請求項9】
前記第1リンクコストは、
前記第1リンクの長さを含む固定情報に基づいて決定される固定コストと、
前記第1リンクにおける天候を含む変動情報に基づいて決定される変動コストと、を含む、請求項1乃至6のいずれか1項に記載の物品輸送システム。
【請求項10】
前記処理回路は、
前記物品の重量、サイズ又は品種を含む物品情報を取得することと、
前記複数のUGVから前記物品情報に適合する複数のUGVを選別し、前記選別された複数のUGVに対応する前記複数のUGV予定経路を前記データベースから抽出することと、
を行うように構成され、
前記中継点を決定することは、前記選別された複数のUGVに対応する前記複数のUGV予定経路において前記選別されたUGVに渡すと仮定する前記中継点を決定することを含む、請求項1乃至6のいずれか1項に記載の物品輸送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、物品輸送システム、物品輸送方法及び物品輸送プログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
特許文献1には、無人航空機(UAV)と無人地上車両(UGV)との間で物品を受け渡しさせるシステムが開示されている。前記システムは、無人航空機が飛行中に行うセンシングにより得られた第1センシング情報に基づいて物品受け渡し候補を選定し、当該選定された物品受け渡し候補の位置情報に基づいて無人地上車両の移動制御を実行し、無人地上車両が行うセンシングにより得られた第2センシング情報に基づいて前記選定された物品受け渡し候補を基準として物品受け渡し場所を決定する。
【先行技術文献】
【特許文献】
【0003】
特許第6527299号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記システムでは、無人航空機及び無人地上車両の移動制御が複雑になるとともに、無人航空機及び無人地上車両の移動距離等が考慮されないために移動エネルギーの消費量が大きくなり得る。
【0005】
本開示の一態様は、UAV及びUGVの数が少ない物品輸送システムであっても、複雑な移動制御を必要とせずに移動エネルギーの消費量を抑えた物品輸送を実現することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る物品輸送システムは、空中を含む三次元内の点を示す複数の第1ノード、及び、前記第1ノード同士をそれぞれ結ぶ複数の第1リンクを含むUAV行路と、前記第1リンク毎に関連付けられ、前記複数の第1リンクをそれぞれ通過するのに必要な第1リンクコストと、前記UAV行路における前記UAVの予定経路であるUAV予定経路と、地上の点を示す複数の第2ノード、及び、前記第2ノード同士をそれぞれ結ぶ複数の第2リンクを含むUGV行路と、前記第2リンク毎に関連付けられ、前記複数の第2リンクをそれぞれ通過するのに必要な第2リンクコストと、前記UGV行路における前記複数のUGVの予定経路である複数のUGV予定経路と、を記憶するデータベースに接続するように設定され、無人航空機である少なくとも1つのUAVと無人地上車両である複数のUGVとが用いられる物品輸送システムであって、前記複数のUGV予定経路にそれぞれ対応する前記複数のUGV毎に、物品を運ぶ前記UAVが前記物品を前記UGVに渡すと仮定する中継点を決定することと、前記複数のUGV予定経路にそれぞれ対応する前記複数のUGV毎に、前記第1及び第2リンクコストに基づいて、前記UGV予定経路における前記UGVの現在地から前記中継点までのUGV移動コストと、前記UAV予定経路における前記UAVの現在地から前記中継点までのUAV移動コストと、を含む合計コストを計算することと、前記複数のUGV予定経路に夫々対応する前記複数のUGVから、前記合計コストが最小である前記UGVを選択することと、前記選択されたUGVに対応する前記中継点において前記UAVから前記選択されたUGVに前記物品を渡すことを、前記UAV及び前記選択されたUGVに指令することと、を行うように構成されている処理回路を備える。
【0007】
本開示の一態様に係る物品輸送方法は、空中を含む三次元内の点を示す複数の第1ノード、及び、前記第1ノード同士を夫々結ぶ複数の第1リンクを含むUAV行路を通行可能な無人航空機である少なくとも1つのUAVと、地上の点を示す複数の第2ノード、及び、前記第2ノード同士を夫々結ぶ複数の第2リンクを含むUGV行路を通行可能な無人地上車両である複数のUGVとを用いる物品輸送方法であって、前記複数のUGV予定経路に夫々対応する前記複数のUGV毎に、物品を運ぶ前記UAVが前記物品を前記UGVに渡すと仮定する中継点を決定することと、前記複数のUGV予定経路に夫々対応する前記複数のUGV毎に、前記UGV予定経路における前記UGVの現在地から前記中継点までのUGV移動コストと、前記UAVの予定経路であるUAV予定経路における前記UAVの現在地から前記中継点までのUAV移動コストと、を含む合計コストを計算することと、前記複数のUGV予定経路に夫々対応する前記複数のUGVから、前記合計コストが最小である前記UGVを選択することと、前記選択されたUGVに対応する前記中継点において前記UAVから前記選択されたUGVに前記物品を渡すことを、前記UAV及び前記選択されたUGVに指令することと、を含む。
【0008】
本開示の一態様に係る物品輸送プログラムは、前記方法を少なくとも1つのプロセッサに実行させる。前記プログラムは、コンピュータ読み取り可能な記憶媒体に記憶され得る。前記記憶媒体は、非一時的(non-transitory)で有形(tangible)な媒体である。前記記憶媒体は、コンピュータ(例えば、携帯情報端末、パーソナルコンピュータ、サーバ等)に内蔵又は外付けされ得る。前記記憶媒体は、RAM、ROM、EEPROM、ストレージ等を含み、例えば、ハードディスク、フラッシュメモリ、光ディスク等とし得る。前記記憶媒体に記憶されたプログラムは、前記記憶媒体が直接接続されるコンピュータにおいて実行されてもよいし、前記記憶媒体とネットワーク(例えば、インターネット)を介して接続されたコンピュータにおいて実行されてもよい。
【発明の効果】
【0009】
本開示の一態様によれば、UAVがUGVに物品を渡す中継点までのUAV及びUGVの両方の移動コストを勘案して複数のUGVから1つのUGVが選択されるため、UAV及びUGVに無駄な予定外の移動が生じることが抑制される。よって、UAV及びUGVの数が少ない物品輸送システムであっても、複雑な移動制御を必要とせずにUAV及びUGVの移動エネルギーの消費量を抑えた物品輸送を実現できる。
【図面の簡単な説明】
【0010】
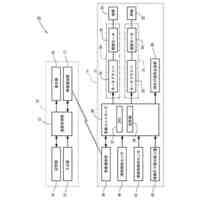
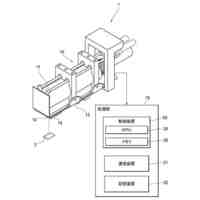
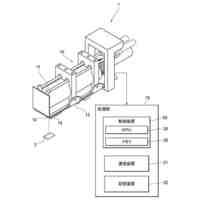
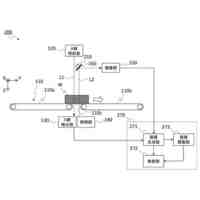
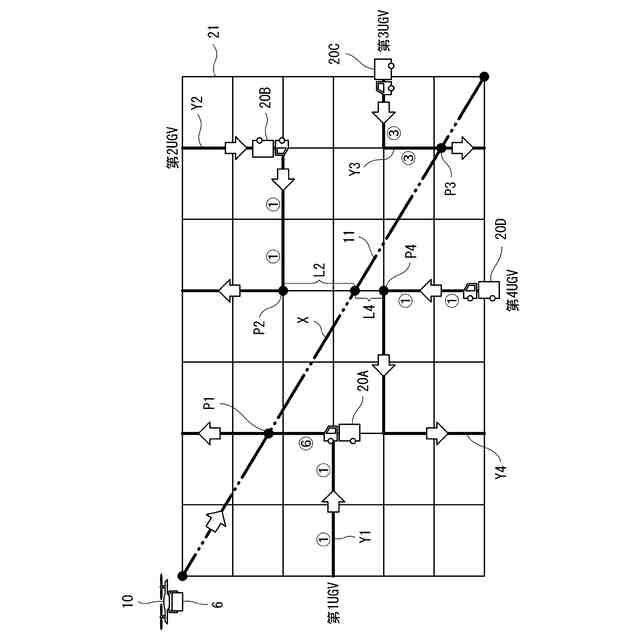
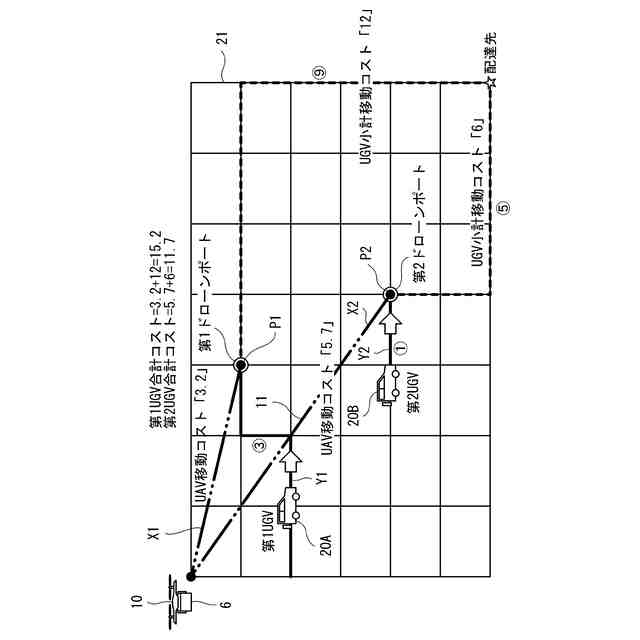
図1は、第1実施形態に係る物品輸送システムの概念図である。
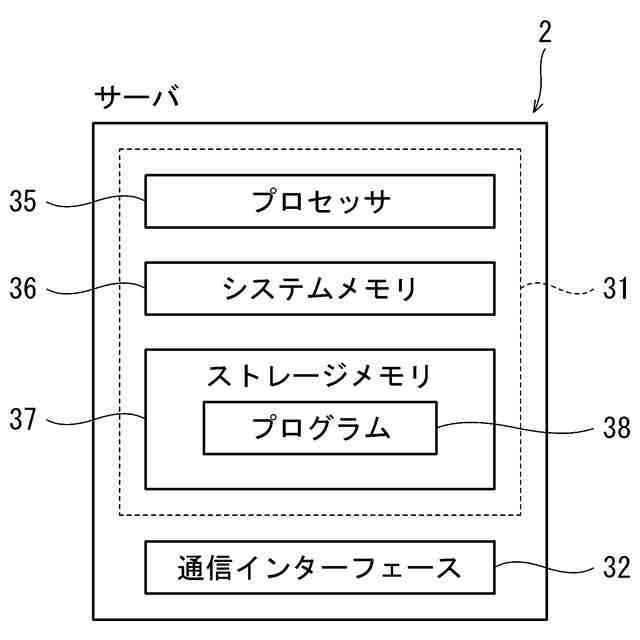
図2は、図1のサーバのブロック図である。
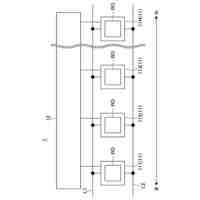
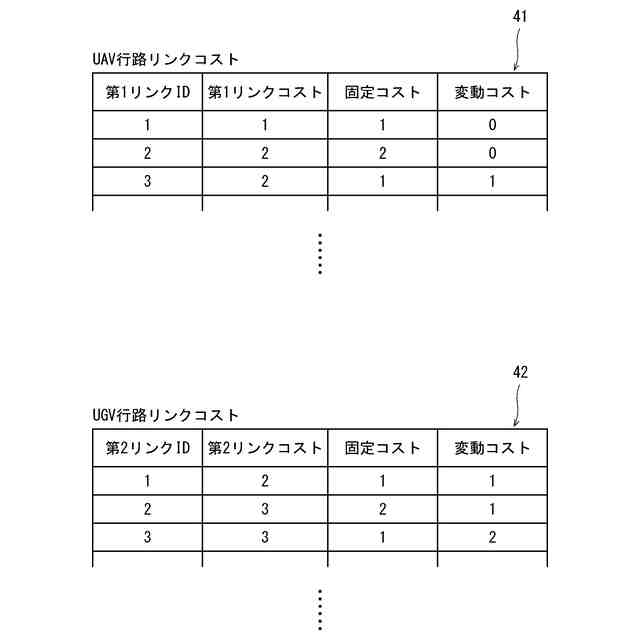
図3は、図1のデータベースのUAV行路リンクコスト及びUGV行路リンクコストを示すテーブルである。
図4は、図2のサーバの処理を説明するフローチャートである。
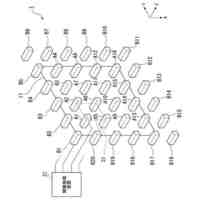
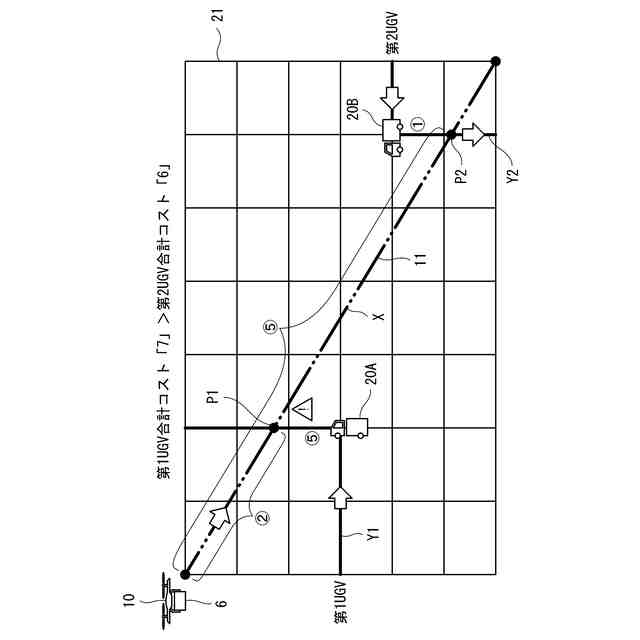
図5は、図1のUAV行路及びUGV行路を重ねて表示した平面図である。
図6は、第2実施形態における図5相当の平面図である。
図7は、図6におけるUAVの予定経路の変更を示す平面図である。
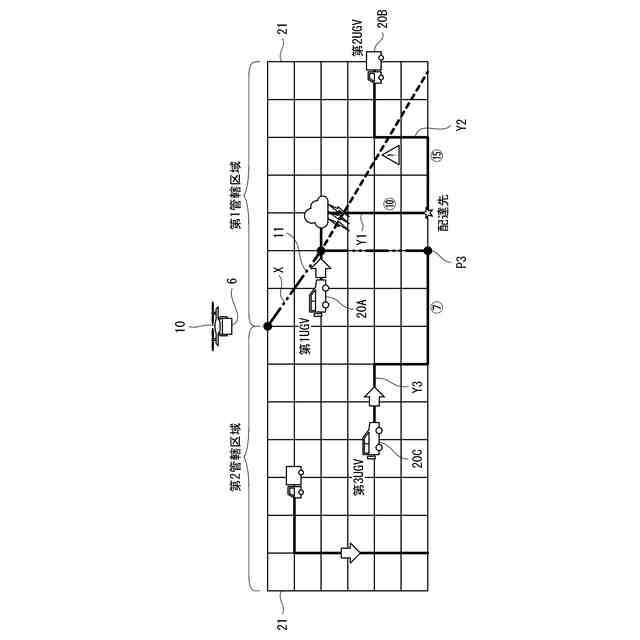
図8は、第3実施形態における図5相当の平面図である。
図9は、第4実施形態における図5相当の平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
25日前
株式会社イシダ
計量装置
19日前
日本精機株式会社
表示装置
5日前
株式会社エビス
水準器
4日前
日本精機株式会社
アセンブリ
11日前
個人
準結晶の解析方法
11日前
個人
アクセサリー型テスター
26日前
株式会社豊田自動織機
自動走行体
10日前
株式会社テイエルブイ
振動検出装置
25日前
栄進化学株式会社
浸透探傷用濃縮液
1か月前
日本碍子株式会社
ガスセンサ
4日前
株式会社ミツトヨ
画像測定機
27日前
ダイハツ工業株式会社
試料セル
25日前
トヨタ自動車株式会社
検査装置
19日前
大和製衡株式会社
計量装置
1か月前
GEE株式会社
光学特性測定装置
10日前
トヨタ自動車株式会社
電気自動車
26日前
日本特殊陶業株式会社
ガスセンサ
11日前
株式会社不二越
X線測定装置
5日前
理研計器株式会社
ガス検出器
27日前
株式会社TISM
センサ部材
10日前
株式会社不二越
X線測定装置
5日前
理研計器株式会社
ガス検出器
27日前
東ソー株式会社
簡易型液体クロマトグラフ
21日前
理研計器株式会社
ガス検出器
27日前
理研計器株式会社
ガス検出器
27日前
株式会社熊谷組
計測システム
1か月前
理研計器株式会社
ガス検出器
27日前
リバークル株式会社
荷重移動試験装置
19日前
大和製衡株式会社
表示システム
17日前
株式会社ニコン
検出装置
25日前
TDK株式会社
計測装置
5日前
株式会社 システムスクエア
検査装置
1か月前
株式会社小糸製作所
物体検知システム
11日前
エスペック株式会社
温度槽及び試験方法
6日前
東洋計器株式会社
超音波式流量計
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ